街道空间宜步行性的精细化测度与导控
——基于虚拟现实与可穿戴生理传感器的循证分析
2022-02-19陈志敏
陈志敏
黄 鎔
黄 莹
陈 筝
叶 宇*
1 街道宜步行性提升:背景、需求与新可能
1.1 城市化“下半场”的公共空间品质重塑浪潮
随着中国城市化步入“下半场”,城市建设逐渐从注重城市空间供给的“量”转变为提升城市空间环境的“质”,随之而起的是城市公共空间品质营造的浪潮[1]。“十三五”规划纲要明确指出应当全面推行城市科学设计,推进城市有机更新。在宏观发展思路转变的同时,地方政府对于公共空间的品质追求也日益提升。多个城市相继发布品质导向的城市设计导则,一系列相应实践也不断涌现。在此背景下,当前城市设计正在进入以存量设计为主导类型、以品质提升为主要任务的新阶段。城市设计正在由应对城市空间扩张的宏观增长性设计,转向以内涵品质提升为主导的建成环境营造与精细化管理[2]。可以预见,随着对于人性化、品质化公共空间的追求,城市设计中愈发需要能高效、精准度量空间品质的分析技术。
1.2 街道空间宜步行性的概念界定与当前局限
街道,是城市公共空间的重要组成部分,也是与城市居民关系最为紧密的公共场所[3]。本研究所关注的街道空间是指垂直方向上以街道两侧的临街建筑外墙为界,水平方向上以建筑临街面和道路共同围合所形成的人本尺度空间与界面。其与广义的街道可步行性概念有所区别,聚焦于各类街道空间与界面特征要素影响下行人所感受到的宜步行程度。
因此,街道空间宜步行性作为一种非实体的主观感知,往往难以开展精准的评估与设计。历年来的相关研究主要关注于宏观或中观层面[4],而针对街道空间界面这一微观层面上行人所能感知的宜步行性开展的研究相对较少。虽然这一主观感知可以由设计师结合个人经验开展初步判断,但街道要素复杂,传统途径已无法满足人本尺度的精准设计与导控需求,亟须立足于公众感知的精准更新与介入。
1.3 测度不可测:新技术支持下精准研判的可能
城市设计领域的新技术经过数年的涌现,正在进入协同深化期。城市设计领域中以技术为支撑、以人为核心、以品质为导向的研究与实践日益增多[5]。虚拟现实(virtual reality)技术的小型化和普及化让实验室条件下的沉浸式感受研究成为可能,为主观感知的科学获取与量化分析提供了新的途径[6]。可穿戴生理传感器技术,特别是日渐成熟的脑电传感器与皮电传感器的集成使用,为客观测度被试者感受提供了新的途径[7]。上述技术的协同,有望突破以往研究局限于经验性的抽象感知限制,从主观视角出发量化分析市民在街道空间系统中的感受,以客观视角为辅助验证其有效性,进而为街道空间品质的系统性、科学化分析与导控提供支持。
2 新技术条件下的街道空间宜步行性研究简述
2.1 沉浸式虚拟现实技术在建成环境研究中的兴起
虚拟现实技术提供了在实验室环境中对实景进行再呈现和调控的可能,近年来正逐步向城市设计领域扩展,其不仅能够提供沉浸式的设计方案展示,还能够辅助环境行为学研究,在实验室环境下提供贴近实景的虚拟环境,有效排除实地调研中的不可控因素。与传统环境行为学中常用的行为注记法相比,虚拟现实技术能更为客观、准确地实现行为观测,提升研究信度[8]。
这一技术在相关领域的迅速兴起,一方面得益于虚拟现实技术的小型化,使得以往昂贵且需要大型洞穴式虚拟现实展示环境和Unity3D等游戏引擎才能较好实现的沉浸式体验可以以较低的成本快速实现。另一方面,陈述性选择偏好法和离散选择模型为虚拟现实环境中的感知分析提供了科学化、定量化的途径,让感知采集不再流于表面化的分析,而是能在统计模型的支持下实现空间要素影响权重的测度[4,9]。
技术的进步使得基于陈述性选择偏好法和虚拟现实技术的被试者感受精准采集和特征权重测算成为可能,有望为街道空间的宜步行性研究提供立足主观视角的新切入点。
2.2 可穿戴生理传感器技术在建成环境研究中的涌现
技术的进步使得可量化、客观反映人本感知的传感器设备日益便携化,并逐渐运用于建成环境体验研究[10]。依靠心电传感器(EKG/ECG)、脑电传感器(EEG)、皱眉肌肌电传感器(EMG)、皮电传感器(SC)和呼吸传感器(resp)等设备的整合可实时精准记录环境中行走的人的情绪体验[11]。具体而言,皮电传感器可以较好地通过皮电导变化实时监控人的出汗情况,进而捕捉人的紧张情绪[9];心电传感器可以通过心率变化较好地拟合人的交感神经与副交感神经的兴奋程度[12];脑电传感器则可以测量人行走过程中沮丧与放松等多种心理感受[13]。
相关实证研究显示,可穿戴生理传感器所采集的多种情绪数据可以较好地反映被试者的空间感知[14]。不同于虚拟现实技术的主观偏好采集,可穿戴生理传感器有望为街道空间宜步行性研究提供具身性的记录和立足客观视角的新切入点。
2.3 小结
虽然目前对于街道空间界面这一细微尺度上的繁复要素与宜步行性感知高低的关系还未有一个系统化的全面测度,但随着近年来虚拟现实与生理传感器技术的发展,使精准测度感知品质成为可能。结合主、客观视角来系统性地构建街道空间界面要素与宜步行性的关联性模型,有助于回应在不同街道特征和有限的空间下,采用何种导控方法能实现较小投入下的街道空间界面宜步行性最大化等单凭设计师经验难以准确回答的问题,并在理论上为街道空间品质研究提供人本尺度的精细化、循证式支持。
3 研究设计
3.1 研究对象
考虑到广州新、旧城区中存在的多样的道路类型,本研究选取2条代表性道路——北京路(旧城区)、花城大道(新城区)作为基础案例。一方面是因为二者都是广州中心城区具有高认知度的街道,其中北京路被认为是广州历史老城区最核心的步行街道之一,花城大道是珠江新城片区被高频使用的街道;另一方面是基于《广州市城市道路全要素设计手册》中的街道空间特征分类,二者的空间特征分别具有新、老城区道路的代表性。
北京路商业步行街位于广州市越秀区,街道主要功能为步行街,人行道宽度14m,两侧建筑多为传统骑楼,体量较小,底层商业界面连续,具有浓厚的商业氛围。花城大道位于广州市天河区,两侧建筑以高层建筑为主,建筑体量较大,在靠近中轴线位置多为办公写字楼,其余地段则以高层住宅为主,人行道宽度10m以上,建筑沿街面主要为商业裙房或绿化隔离带。
3.2 分析框架与技术路线
分析框架包含4个部分。第一部分是文献梳理与实地调研;第二部分是街道空间品质维度和典型要素的操作化定义。基于初步研究所得信息,参考Ewing等[15]的经典研究,初步界定了在街道空间中与可步行性紧密相连的4个关键空间品质维度:围合感、渗透性、多样性和人的尺度(图1),并基于《广州市城市道路全要素设计手册》和相关既有研究在4个维度中提取6个特征要素[16]。

图1 街道空间品质维度和典型要素
1)围合感。街道空间围合感主要关注于街道断面比例[3],本研究选择“退界距离”与“道路宽度”作为人、车视角的围合感典型指征。
2)渗透性。建筑底层临街面的渗透性意味着室内外活动的交流程度,而高密度的界面单元往往具有更大的交流潜力,故选择“界面丰富度”作为渗透性指征。
3)多样性。空间多样性对于街道生活具有积极意义[16],“灰空间”与“空间边界”能共同为人群提供积极的驻留空间和丰富的步行环境。
4)人的尺度。此维度关注休憩设施、行道树木、栏杆等与行人舒适度和安全性相关的“街道家具”。
分析框架的第三部分是实验设计与数据采集。基于可视化陈述性选择偏好(Stated Preference,SP)法对各街道空间界面要素进行正交设计,以最具有代表性的场景必选代替全面实验,并运用光辉城市(Mars)软件平台构建沉浸式虚拟现实场景。一组实验人员对每一组场景开展两两比较,另一组实验人员佩戴可穿戴生物传感器在2条代表性道路中实地行走,记录生理指标作为前述实验的客观验证。第四部分是在获取了主观选择的大样本比较与生理传感器的生理指标记录后,运用离散选择模型(Discrete Choice Models)对各要素及其表征的权重开展精细化计算。
将经过上述四部分生成的评价测度作为循证依据,进一步得出多维度街道空间宜步行性主要影响要素的权重,并依此提出多维度循证分析支持下的街道空间宜步行性提升框架(图2)。

图2 研究框架
3.3 沉浸式虚拟现实场景设计
真实体验的模拟与还原对于在VR环境中进行的空间评估至关重要。VR场景与真实环境的差异越小,被试者表现出的反应就越可靠。因此,在场景搭建时参考了实地调研拍摄的大量照片,同时考虑到真实环境中的人眼可视范围,在2条街道中选取了较为典型的100m范围内的街道进行精细化建模(图3)。

图3 真实场景(左)与VR环境(右)对比
由于所选取的2条研究街道的所在区域和街道类型存在一定差异,因此在制定了统一的评价维度与典型要素后,需要针对各街道进行针对性的变量设计,以更全面准确地反映其特征。
在北京路中,考虑到建筑首层沿街界面主要为商铺,因此将界面丰富度分为高、低水平2个类别:低水平表现为铺面更大、橱窗样式统一的大型店铺;高水平表现为铺面更小、橱窗样式丰富的小型商铺。空间边界、灰空间、外摆水平均取“有”和“无”2个类别,其中“有”水平为北京路现状情况。街道家具共设置5个水平类别:无、乔木、花坛、自行车、座椅。在街道宽度的设置上,参考北京路现状及其他功能相似案例,取值设为8m和15m 2档,其中15m为北京路道路宽度,8m为常见步行商业街的最小宽度(图4)。

图4 北京路街道空间变量示意
在花城大道中,现状建筑首层沿街界面主要为小尺度商铺,因此在界面丰富度中,低水平表现为铺面更大、橱窗样式统一的大型店铺;高水平表现为铺面更小、橱窗样式丰富的小型商铺。灰空间的高度参考《广州城市设计导则》的推荐值,取无、6m、10m 3个值。退界距离取5m和10m 2个值,分别为规划导控文件中推荐退界距离的上下界。考虑到花城大道现有的街道家具布置情况,共取6个水平类别:无、乔木、花坛、栏杆、座椅、自行车。机动车道取六车道(现状)与八车道2个水平类别(图5)。

图5 花城大道街道空间变量示意
3.4 基于虚拟现实技术的行为选择偏好采集
由于实验所需要测量的变量及水平类别较多,采用SPSS正交设计将对比场景的数量控制在可承受范围内。为确保统计的有效性,每一组别中的对比场景不少于20组。最终共选定44组对比场景,其中北京路24组、花城大道20组。
通过网络途径招募106名被试者,其中大部分此前未参加过VR实验。在实验中,被试者被随机分入不同的实验组,于20s内依次观察2个VR场景,对比并选择高品质街道空间。
3.5 基于可穿戴设备的实地体感数据采集
为检验上述实验结果的有效性,通过GPS对被试者的行走路径进行记录,同时通过八通道的ProComp多生物传感设备测量对街道空间特征的生理感知属性,实时记录空间轨迹和电生理信号,再根据情绪效价、唤醒度的数值计算人行走在环境中的实景体验(图6)。
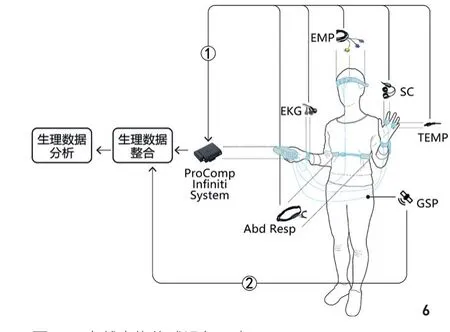
图6 可穿戴生物传感设备示意
基于对实测数据的处理与筛选,通过肌电(EMG)与皮电(EDA)2个生理指标对被试者的情绪进行描述。其中EMG数据能够通过测量肌肉的兴奋水平反映被试者的情感效价,即人的喜好程度;EDA数据则能够通过测量被试者的皮电信号强弱来评估其情感唤醒度,即人的兴奋程度[14]。例如,EMG低而EDA高的环境,通常是交通繁忙、空间局促等易引起紧张的地点;EMG高而EDA高的环境,则通常是空间比例
在本组实验中,各维度均有要素表现出较高水平的显著性,如围合感对应的“道路宽度8m”、渗透性对应的“高界面丰富度”、多样性对应的“高4.6m灰空间”、人的尺度对应的多种“街道家具”均在1%水平上表现出显著性。模型中表现出显著性的类别一方面与经典理论一致,另一方面也为以往依赖于经验的定性分析提供了量化依据。
模型结果显示,对于步行者来说,较高比例人的尺度的“街道家具”布置,如“乔木”的种植、沿街布置的“座椅”与“花坛”可帮助改善步行体验,明显增加被试者选择该场景的意愿。在多样性维度,一个尺度适宜(约为4.6m)的骑楼灰空间也能够通过增加遮蔽空间、形成城市公共空间等方式提高空间品质,正如Ewing等的研究显示[15],步行者更偏好聚集在立面视觉复杂度较高的公共空间中,这也从视觉复杂度的角度验证佳、活动生动有趣等可以引起积极情绪的地点。
由于个体间的生理状态差异,相比于分析被试者各项指标的绝对值,分析其数据的变化趋势在研究中拥有更大的意义。在对数据使用z-score标准化处理后,对街道公共空间的步行体验进行可视化分析。
4 数据分析与讨论
4.1 街道空间宜步行性的主观视角测度:基于离散选择模型与虚拟现实技术
4.1.1 北京路
场景(界面丰富度=低,覆盖高度=无,空间边界=无,街道家具=无,道路宽度=15m)被设定为效用测度的基准值。本组实验共有31名被试者参与。该模型R2为0.210,调整后R2为0.200。该解释度在社会学研究领域可接受,模型的拟合优度尚可(表1)。了骑楼“灰空间”对于公共空间的正面效用。在围合感维度,相比北京路现状较为宽阔的“道路宽度”,更窄的街道宽度将大幅降低街道的环境品质,甚至超过种植乔木所能带来的效用提升。根据现场观测,北京路的道路D/H比基本在1.0左右的舒适范围内,而VR实验也验证了这一结论。

表1 北京路街道空间变量水平效用
4.1.2 花城大道
场景(界面丰富度=低,灰空间=无,空间边界=无,退界距离=10m,街道家具=无,道路宽度=八车道)被设定为效用测度的基准值。本组实验共有40名被试者参与。模型R2为0.264,调整后R2为0.257(表2)。

表2 花城大道街道空间变量水平效用
在本组实验中,围合感对应的“退界距离5m”、多样性对应的“高6m灰空间”和“空间边界”、人的尺度对应的各类街道家具大都在1%水平上表现出显著性;“高界面丰富度”“六车道宽度”均在5%水平上表现出显著性。
在围合感维度,相较于花城大道现状宽阔的退界宽度,“退界宽度5m”能够提高围合感,显著提升街道空间的环境品质;而“六车道”相比现状的“八车道”表现出微弱的正面效用,原因可能是过宽的车行道本身暗示了繁忙的交通流量,也增加了穿越街道的困难度。在渗透性维度,对于花城大道的步行者来说,“高界面丰富度”即更多小尺度商铺的街道界面比占据多个开间的大型店铺(如超市、连锁店等)更具有吸引力。这表明建筑首层的小型商铺可为一个地区居民的社交与日常活动产生积极影响,进而支撑良性的街道生活。在多样性方面,由于花城大道现有建筑体量较大,因此2种高度的“骑楼灰空间”均表现出一定的显著性,其中高度“6m”的效用远高于“10m”;但被试者对于骑楼的“空间边界”表现出明显的厌恶感,这可能是因为其在视觉上形成了一定的压迫感。在“人的尺度”维度,除“栏杆”外的各类街道家具均能显著提高被试者的选择意愿。
由2条街道对比可见,新、老城区代表街道的各要素水平所表现出的效用存在明显差异(图7)。在围合感维度,“缩小现状车行道宽度”在北京路表现为明显的负效用,而在花城大道中较窄的车行道宽度更能够获得被试者的偏好;“退界距离”对花城大道表现出正效用(北京路实验无此变量),这与新、老城区的街道高宽比所营造的街道空间围合感有关。
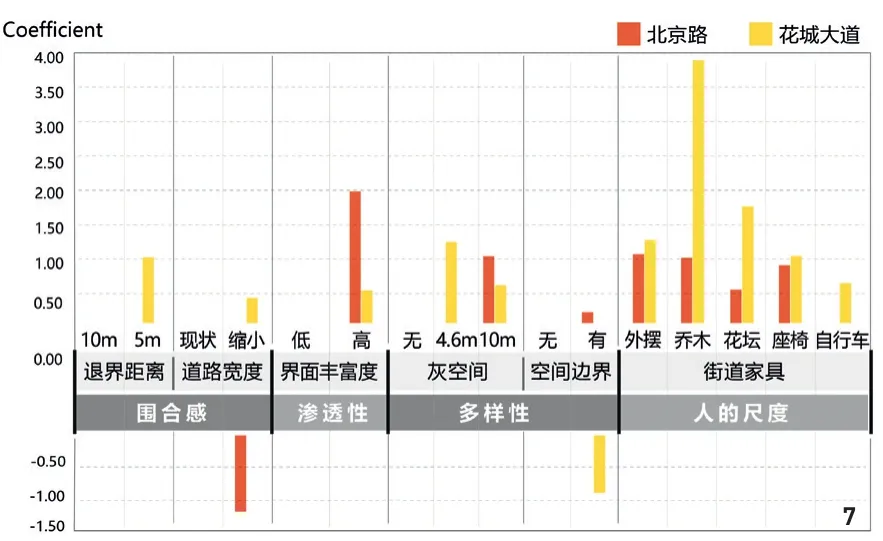
图7 街道要素及水平效用对比
在渗透性维度,“高界面丰富度”对于2条街道均有一定程度的正效用,且对北京路的影响更大,可能是因为其特殊的街道类型所致。
在多样性维度,不同尺度的“灰空间”均能在花城大道中表现出正效用,取值为10m的“灰空间”要素能增加北京路的街道空间多样性。此外,“空间边界”仅在花城大道中有较显著的负效用,可能是因为与街道现状较宽阔的空间相比,空间边界遮蔽了视野,同时较粗的柱子也增加了对步行者的压迫感。
在人的尺度维度,“外摆”“乔木”“花坛”“座椅”均能带来明显的正效用,外摆能够为街道公共空间提供休息设施,使用外摆的居民也为街道增添了活力;值得注意的是,“花坛”对新城区街道产生的影响高于老城区,而“自行车”要素,特别是共享单车,能够增加被试者对于场景中交通便利程度的认知。
4.2 街道空间宜步行性的客观视角测度:基于可穿戴生理传感器技术
如图8所示,结合空间轨迹的生理情绪数据可视化结果较好地反映了被试者受空间影响的情绪反应。其中每一个点代表街道中该取样点的生理情感数据,点的面积反映了EMG数据的高低,面积越大则该处被试者EMG数据越高;点的颜色反映了EDA数据的高低,越偏近红色则EDA数据越高(图9)。例如一些围合感适中、街道家具布置较多的街道,其空间特征与活动能够引发人的积极情绪,在地图中可被识别为偏紫色的点。取样点面积“小”和“大”表示了空间特性可能引发的不同情绪属性,例如界面丰富度高会引发较大的街道活动密度,使人感到“放松安逸”或“兴奋快乐”,进而在数据记录中可视化为较大的点。

图8 北京路(左)和花城大道(右)生理情感反应地图
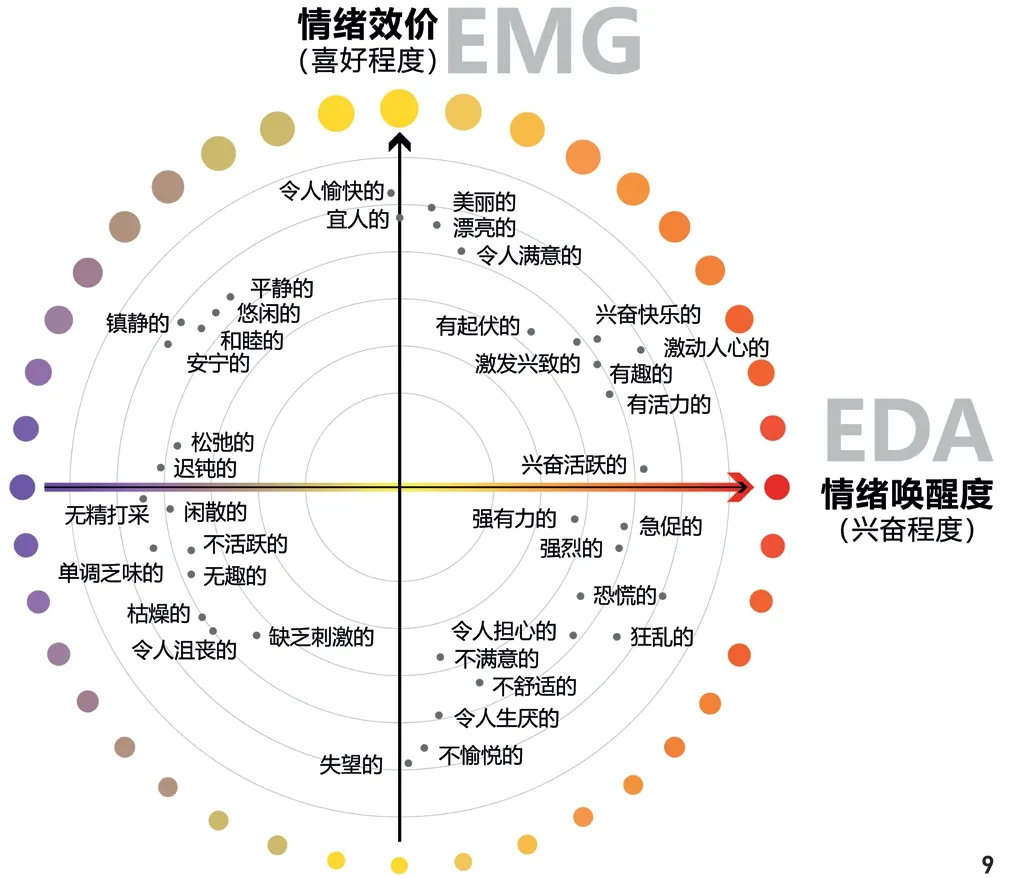
图9 情绪效价(EMG)与情绪唤醒度(EDA)二维模型
具体而言,图8中北京路A节点处EMG与EDA数据均偏高,表现为面积大的红色点。此处为北京路步行街段,在渗透性维度,沿街“界面丰富度高”,有较密集的商业行为发生;在多样性维度,有柱廊形成的连贯“空间边界”和骑楼“灰空间”,被试者的生理电信号会表现出明显的兴奋感,且带有一定紧张感。相比之下,北京路B节点处被试者呈现出较明显的消极情绪,表现为面积小的红色点,原因可能是此处十字路口在围合感维度具有较高的“道路宽度”,带来了强烈的不安全感。花城大道C节点处毗邻珠江公园,数据表明被试者感受到环境的压力较小,表现为较小的紫色点,原因是在人的尺度维度,“乔木”的大量种植使街道绿视率较高、街道高宽比较低,表现出了更舒适的空间品质。而花城大道D节点处会使被试者感受到较大的压力,表现为中等的橙色点,原因是在多样性维度,此处无可接触的“街道界面”与“灰空间”,且缺乏人本尺度的“街道家具”,导致绿视率较低,空间品质较差(图10)。
通过新、旧城区典型道路的对比分析可以看出,一个“多样性”高且具有一定“人的尺度”的街道家具和绿化的街道,其优良的空间品质更能激发步行者的积极情绪。在旧城区的典型区域中,“围合感”高即街道高宽比较高的区域表现出更好的空间品质,而在新城区中,街道高宽比相对更低的区域空间品质更优,这与新城区密集的高层建筑造成的压迫感有关,与前述VR实验所得到的结论一致。
5 总结与展望
5.1 多维度循证分析支持下的街道设计导控
基于上述分析所得的各类要素及其水平的权重测度构建针对广州新、老城区街道空间微更新的设计导控策略。其中,老城区街道行人适宜性评价应更关注人的尺度维度,考虑街道空间本身的骑楼属性。微更新优化设计策略宜首选结合原有骑楼设置局部外摆区域和家具,将商店活动延伸至街道上,增加与行人的互动可能;其次可通过提高界面窗墙比与界面丰富度来提高渗透性;最后可结合骑楼和外摆区域设置局部灰空间,削弱过长的骑楼空间造成的封闭感(图11)。
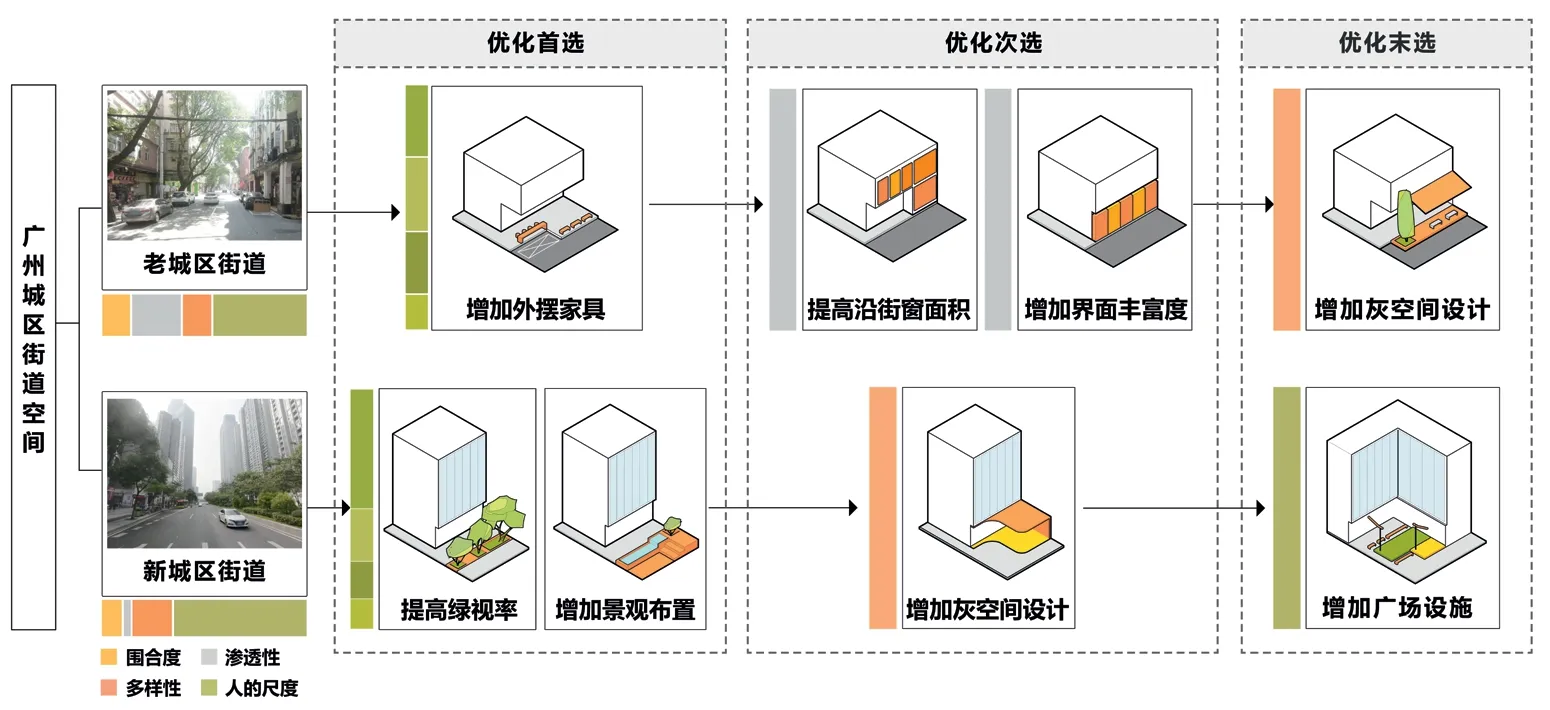
图11 街道空间微更新设计导控策略
新城区道路在退界范围大、街道高宽比高的情况下,应首先考虑局部提高绿视率、增加景观布置,较宽的街道适合布置高大乔木,有效提高人视线范围内的围合感,提升步行安全感;其次可结合原有景观节点增加灰空间设计,为行人提供驻留场所,一定数量的座椅也能够为步行者提供休憩空间,促进产生积极的社会活动,提升街道的步行适宜性;最后可考虑增加广场设施,如座椅、灯具、雕塑等,在近人尺度提升场所的使用体验。
进一步基于上述分析所得的各类要素水平权重测度,量化城市设计中各要素的推荐值,并在一定程度上指导控制性详细规划的制定。
以北京路为代表的旧城区道路,其街道高宽比较高(大于1)的街道形式能够给人提供较为舒适的空间感受,推荐的街道宽度为15~21m。同时由于北京路步行街两侧商业氛围浓厚,可设置宽度为1~3m的外摆区。
以花城大道为代表的新城区道路,其沿街建筑较高,因此需要适度拓展街道剖面形态以减少高层建筑对于行人的压迫感,考虑到花城大道交通流量较大,建筑的退界距离应保持在6~10m,并留出较宽阔(不大于5m)的外摆区。
此外,新、旧城区的道路均应鼓励沿街商铺的设置。综合其建筑尺度考虑,推荐北京路百米店铺数量为14~25个,花城大道为10~20个。
5.2 技术创新与研究意义:街道微更新层面的应用可能
本研究运用虚拟现实与生理传感器技术,测度以往难以精准评估的感知品质,使数据支持下人本视角的街道微更新成为可能。系统性地构建街道空间界面要素与宜步行性的关联性模型,帮助探寻在新、旧城区的街道微更新中,应采用何种导控方法才能在有限的空间中高性价比地提升街道宜步行性。同时,虚拟现实技术与可穿戴生理传感器技术已有相关深入探索,本研究在此基础上,基于生理传感器数据的客观视角证明了“虚拟现实技术+陈述性选择偏好法”的有效性,在理论上为街道空间品质研究提供了人本尺度的精细化、循证式回应。
5.3 研究局限与未来探索
本研究在生理传感器实测部分样本数量少,仅可在一定程度上验证可视性SP法的结论,难以排除部分要素之间可能存在的共线性问题,有待进一步进行单一变量的研究。还需指出,当前研究中的被试者多为年轻群体,未覆盖各年龄段,相关结果与公众经验之间可能存在一定偏差,未来应尝试收集多年龄段数据,对各变量水平效用进行纠正。
本研究展示了一个具身循证视角的新兴建成环境审计与优化方向,大数据和开放数据所构成的新数据环境为更细致的街道空间界面特征提取提供了数据基础,由其他学科外溢的深度学习、虚拟现实和可视化SP问卷等新技术方法更为宜步行性的深入研究提供了工具。未来可基于此开展智能化分析工具编写和关键要素量化导控,构建大规模、精细化的交互可视化平台,在人本视角下快速展开广州城区的街道品质评估与更新工作,进而满足精准城市设计的需求。
注:文中图片均由作者绘制。
