基于自适应动态面的高速列车蠕滑速度跟踪控制
2022-02-19徐传芳
徐传芳
(大连交通大学 自动化与电气工程学院,辽宁 大连 116028)①
高速列车牵引力/制动力的形成依赖于轮轨间的黏着[1].在列车车轮不发生滑动的条件下,传递到轮对的驱动力矩/制动力矩通过轮轨间的黏着产生黏着力,并进而转化为列车运行所需要的牵引力/制动力[2].轮轨间通过相互作用产生并传递黏着力的大小与轮轨间微量滑动的程度存在着密切关系.为了实现复杂运行环境下列车的可靠运行,需要对列车进行黏着控制.由于蠕滑率体现了轮轨间微量滑动的程度,很多文献通过确定期望蠕滑率,并设计控制算法实现列车车轮对期望蠕滑率的跟踪,来实现对列车的黏着控制[3-4].然而,在列车从零速开始加速以及降速到车轮角速度为零时,蠕滑率可能出现不连续点;而且在列车车体速度和车轮角速度接近零时,基于蠕滑率设计的控制器可能会出现抖振问题[5],因此,基于蠕滑率跟踪设计黏着控制器并不是一个很好的选择.另外,由于期望跟踪目标的好坏直接决定了黏着控制的效果,文献[3-4]研究的重点均为期望蠕滑率的获取.实际上,对期望目标的精确跟踪控制同样重要,否则期望目标的获取也就失去了意义.针对上述问题,文献[5-7]基于蠕滑速度跟踪研究了列车的黏着控制方法,解决了基于蠕滑率跟踪控制算法存在的问题,并重点探讨了对高速列车期望蠕滑速度的精确跟踪控制问题.
另一方面,上述文献中提出的黏着控制算法存在过度依赖列车模型精确信息问题.实际上,由于乘客及所携带行李的不确定性、线路条件、天气、列车速度等诸多因素的影响,列车质量和运行基本阻力,车轮的黏滞摩擦系数以及轮轨间的黏着力难以精确测定.过度依赖列车模型信息的控制算法,在列车实际运行过程将很难保持良好的控制效果.因此,迫切需要设计不依赖于列车质量、基本阻力、黏着力以及车轮黏滞摩擦系数等不易测量列车模型信息的蠕滑速度跟踪控制策略.
基于以上考虑,本文针对高速列车黏着控制中对期望目标的跟踪控制问题,提出了一种新的控制方法.基于考虑牵引/制动动态的列车黏着控制系统动力学模型[6],采用自适应技术手段估计列车模型参数以及系统集总不确定性的上界,避免了控制策略对列车模型信息的过度依赖;在此基础上引入动态面控制方法,设计了高速列车的蠕滑速度跟踪控制策略,避免了基于蠕滑率跟踪控制策略存在的盲点问题以及传统反步法存在的计算量大的问题.通过严格的算法稳定性理论证明和数值仿真结果,说明了文中所提出控制算法的可行性和有效性.
1 高速列车黏着控制系统动力学模型
单轮对的动力学模型,是研究整体机车黏着控制问题的基础.很多文献在研究黏着控制问题时,常采用图1所示的简化轮轨单轴模型[5-6,8].
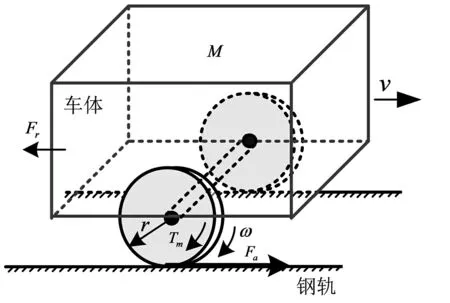
图1 列车简化轮轨单轴模型
列车黏着控制系统动力学模型主要由列车车体和车轮动态方程组成.其中,列车车体动态方程可以表示为[6-7]
(1)
式中,M为列车模型质量,v为列车车体速度,Fr为列车基本阻力,其表达式为:
Fr=a0+a1v+a2v2
(2)
其中,a0、a1、a2为正实数,一般可以通过风洞试验和实际运营所积累的数据中获知,但在列车实际运行中,其准确值难以确定.
Fa为轮轨黏着力,在列车车轮未发生滑动时,其实际为列车的牵引力/制动力,其表达式一般为[9]
Fa=μ(λ)Mg
(3)
其中,μ(λ)为黏着系数,是蠕滑率λ的非线性函数.黏着系数与轮轨间的蠕滑以及轮轨状况之间存在复杂的关系,其具有高度非线性、不确定性和随机性等特点[10].目前国内外常采用Burckhardt模型来描述,其表达式为[11]
(4)
其中,ci(i=1,2,3)>0,不同的ci代表不同的轨面状态;sign为符号函数;λ为蠕滑率,其表达式为
(5)
式中,vs为蠕滑速度,其值为动轮滚动圆周速度与列车前进速度的差值,表达式为
vs=ωr-v
(6)
为了分析方便,忽略传递过程中的转矩损耗,则列车车轮的动态方程可表示为[12]
(7)

轮轨间黏着力的产生过程为:列车自动驾驶控制器根据列车运行情况,或者驾驶员手动调整牵引/制动手柄级位,发出控制指令,列车牵引/制动系统接收到指令后,由牵引电机产生相应的驱动/制动力矩并通过齿轮箱传递给轮对,最后通过轮轨间的相互作用产生黏着力.所以,对于黏着控制器来说,其被控对象应该是包含牵引/制动系统在内的列车黏着动力学系统.考虑到列车牵引电机的电磁惯性比列车的机械惯性要小得多,因此,当考虑牵引/制动动态响应来研究列车的黏着控制问题时,可以忽略牵引电机输出转矩产生的详细过程,用一个一阶惯性环节来近似代替[7],即
(8)
式中,Tz表示期望的牵引电机驱动/制动转矩,为系统的控制变量,α和β均大于零.
根据式(1)及式(6)~(8),可得到以蠕滑速度和牵引电机输出转矩(即作用到车轮上的驱动/制动力矩)为系统状态变量的列车黏着控制系统模型:
(9)
(10)
其中,Ftd为系统的集总不确定性,其由未知参数和难以精确获知的未知函数等构成,表达式为
(11)
2 控制器设计及稳定性分析
控制器的控制目标为:针对式(9)和式(10)构成的系统,在部分模型参数和系统集总不确定性Ftd未知的条件下,设计合适的控制算法,实现高速列车对期望蠕滑速度的精确跟踪.由于本文重点是对目标蠕滑速度的跟踪,其如何获取问题不作讨论.
2.1 控制器设计
Ftd包含复杂的未知非线性项,且部分参数难以获取.为实现控制目标,需要处理Ftd对系统的影响,本文采用基于自适应技术估计其上界的方法.
易知Fa、Fr和B有界,因此如下不等式成立
(12)
其中,μmax为最大黏着系数,a0max、a1max、a2max和ζb分别为a0、a1、a2和B的最大值,μmax、a0max、a1max、a2max和ζb均为未知正数.
由不等式(12)可知,Ftd满足如下不等式:
|Ftd|≤T0+T1|v|+T2|v|2+T3|ω|
(13)

观察式(9)和(10)可发现,当考虑牵引/制动动态时,列车黏着控制系统模型为一串级非线性系统,可以考虑应用反步法来解决其跟踪控制问题.但是,反步法需要对虚拟控制量进行微分计算,控制算法复杂.因此,本文采用在反步法基础上进一步发展和延伸出来的动态面控制方法,来设计高速列车的蠕滑速度跟踪控制策略,在降低计算量的同时,实现高速列车黏着控制中列车车轮对期望蠕滑速度的精确跟踪.设计步骤如下:
步骤1:定义列车蠕滑速度跟踪误差为evs,即
(14)

求evs对时间的导数
(15)
(16)

(17)

(18)
式中,τ>0,为滤波器的滤波时间常数.
定义滤波估计误差为
(19)
为第一个子系统选取Lyapunov函数
(20)

求V1对时间的导数,并结合式(9)、(13)、(15)~ (17),以及式(19)可得
(21)
由Young不等式[13],如下不等式成立
(22)
将式(22)代入式(21),有
(23)
步骤2:定义牵引电机输出转矩跟踪误差为
eT=Tn-Tnd
(24)
eT对时间的导数为
(25)
定义ea=[ea1,ea2]T=[1/β,α/β]T,将式(10)代入式(25),并在其两边均乘以α/β,可得到
(26)
设计系统的实际控制输入量Tz为
(27)

(28)
式中:θ为正实数;Γ为正定对阵矩阵,是一个与算法相关的常数矩阵.
为第二个子系统选择Lyapunov函数
(29)
求V2对时间的导数,并结合式(26)可得到
(30)
将式(27)和式(28)代入式(30),可得
(31)
根据Young不等式,如下关系成立
(32)
将式(32)代入式(31),得
(33)
2.2 稳定性分析
定理:对于式(9)和式(10)所示的系统,设计控制器的控制输入信号和虚拟控制量分别为式(27)和(16),采用式(17)和(28)所示的未知参数自适应更新律,则以下结论成立:①闭环系统的所有信号均半全局一致最终有界;②蠕滑速度跟踪误差可以收敛到式(44)所示原点附近的紧集,且当设计参数k1、k2、σi、bi、θ和τ选择恰当时,稳定状态下系统的蠕滑速度跟踪误差可以尽可能的小.
证明:选择整个系统的Lyapunov函数为
(34)
求V对时间的导数有
(35)
由式(18)和式(19),一阶滤波器滤波估计误差的动态方程可以表示为
(36)

参阅文献[14-15]可知,H(·)是连续函数,且存在η>0,使得H(·)满足|H(·)|≤η.因此,结合式(36),可得到
(37)
结合式(24),并将式(23)、(33)和(37)代入式(35),可得到
(38)
由Yong不等式,可知
(39)
根据不等式(39),式(38)满足如下关系
(40)
则由式(40)可进一步得到
(41)

(42)
从而有
(43)

由式(34)和式(43)易知,列车车轮蠕滑速度跟踪误差evs的收敛域满足如下紧集

(44)
由式(43)和式(44)可以看出,通过设计并选取恰当的控制器参数,比如固定σi和θ,增大bi,减小λmax(Γ-1),使α0尽可能的大,则V∞会尽可能的小,从而可使得稳定状态时的evs尽可能的小,即列车的蠕滑速度跟踪误差可以尽可能的小.证毕.
3 仿真验证与分析
为了验证本文基于自适应动态面方法所设计高速列车蠕滑速度跟踪控制策略的有效性,基于MATLAB/Simulink软件进行了仿真验证.仿真基于列车车辆简化单轴轮轨模型,其具体参数为[6]:列车质量M=12 000 kg,车轮转动惯量J=80 kg·m2,车轮半径r=0.445 m,黏滞摩擦系数B=0.01,列车基本阻力Fr=180.9+112.2v+2.6v2(单位:N).


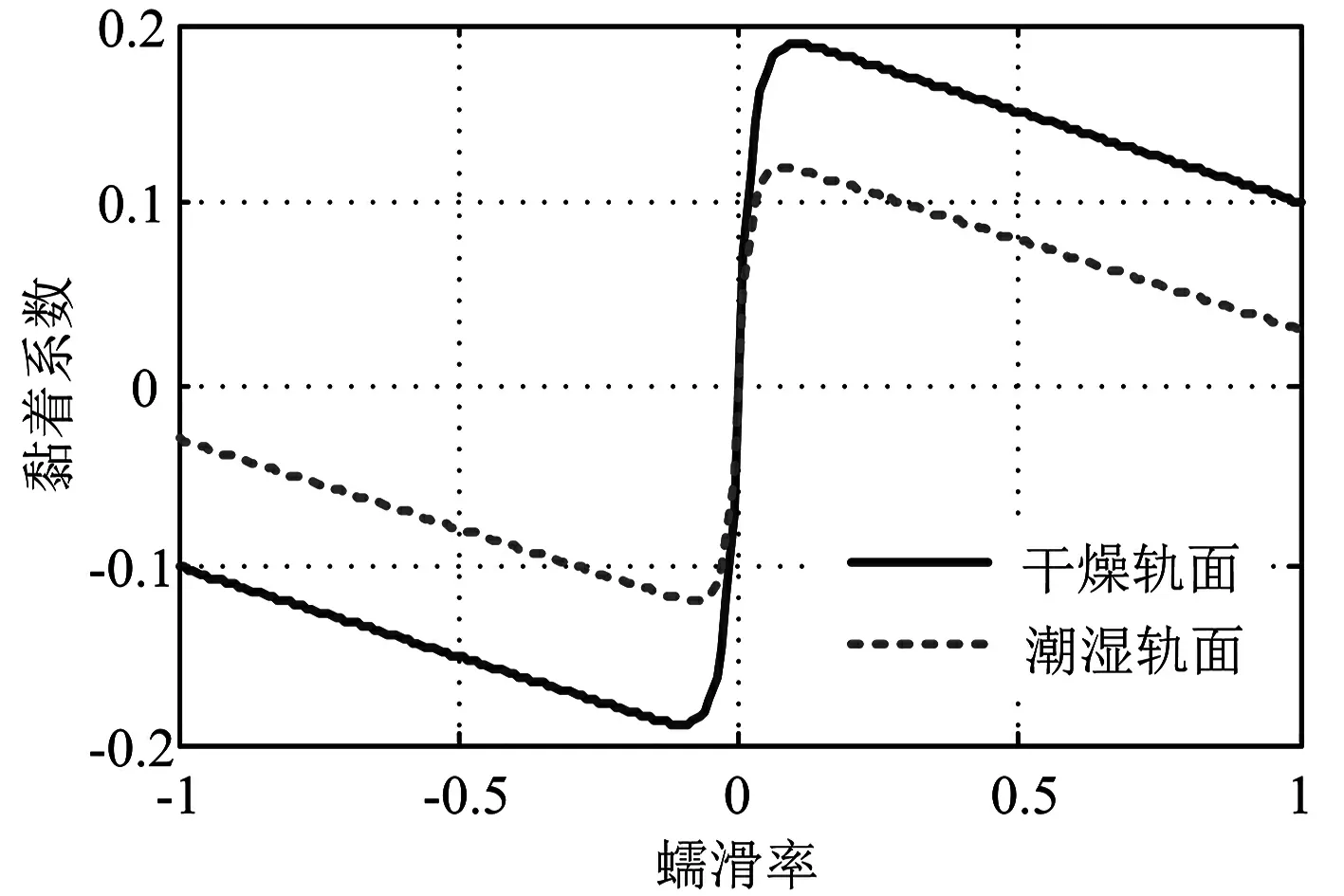
图2 列车黏着特性曲线
仿真结果如图3~7所示.其中,图3为列车车体和车轮的速度曲线,图4为列车车轮的期望蠕滑速度和实际蠕滑速度曲线,图5为蠕滑速度跟踪误差曲线,可以看出,在高速列车的整个控制过程中,无论是稳态时,还是运行状态以及轨面状态发生突变时,高速列车蠕滑速度的波动以及跟踪误差都很小,实现了高速列车车轮实际蠕滑速度对期望蠕滑速度的良好跟踪;图6和图7分别为期望施加到列车车轮的驱动/制动力矩和实际施加到列车车轮的驱动/制动力矩,可以看出,在整个控制过程中,列车都能够及时适当地自动调整施加到列车车轮的驱动/制动力矩,使其很好地跟踪期望驱动/制动力矩,保证了系统的稳态和动态跟踪性能.
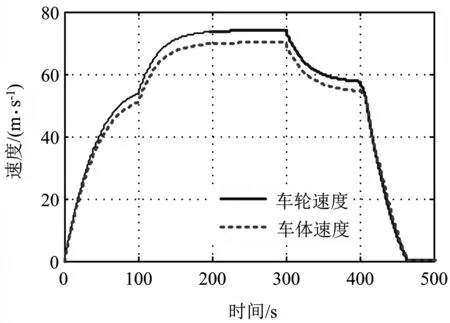
图3 列车车体和车轮速度曲线
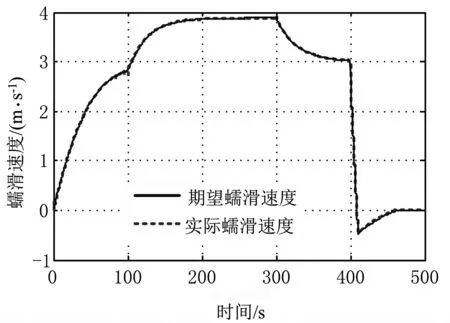
图4 列车的期望蠕滑速度和实际蠕滑速度曲线
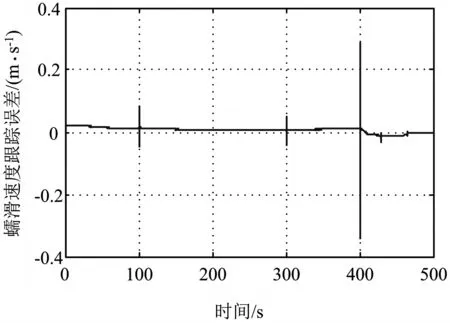
图5 列车的蠕滑速度跟踪误差曲线

图6 期望施加到列车车轮的驱动/制动力矩
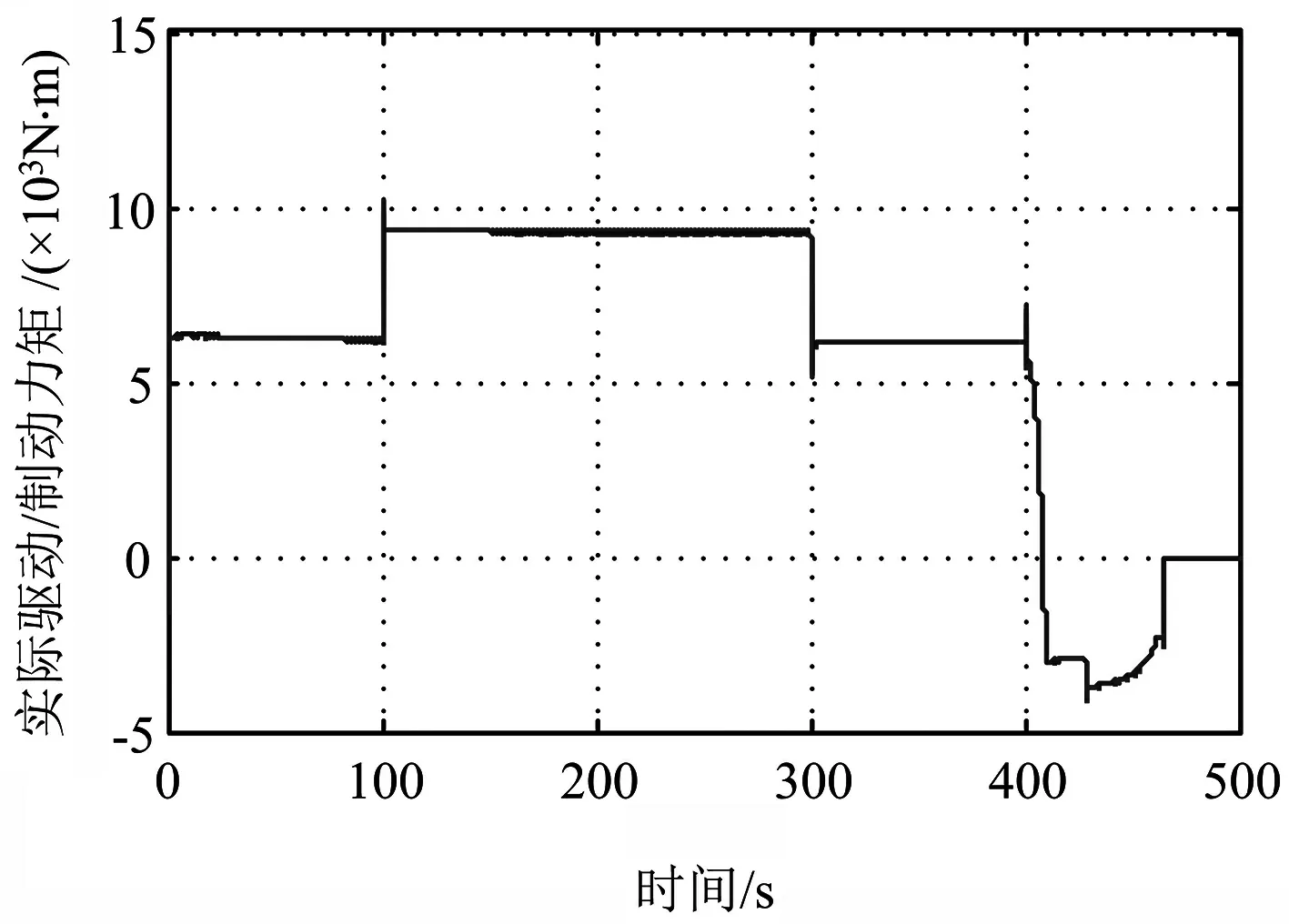
图7 实际施加到列车车轮的驱动/制动力矩
4 结论
本文基于考虑牵引/制动动态响应的列车黏着控制系统动力学模型,研究了黏着控制中对期望蠕滑速度的精确跟踪控制问题.引入基于自适应更新律的模型参数和集总不确定性上界参数估计方法,进而结合自适应技术和动态面方法提出了高速列车的蠕滑速度跟踪控制策略,避免了基于蠕滑率跟踪控制策略存在的不连续点和抖振等问题,并大大降低了控制算法对列车模型参数等信息的过度依赖.理论分析表明,只要控制参数选择恰当,高速列车的蠕滑速度跟踪误差可以尽可能的小.仿真结果表明,文中所提出的算法实现了高速列车车轮实际蠕滑速度对期望蠕滑速度的精确跟踪.
