汽车速度表、里程表校正作业过程的误差及其影响分析
2022-02-18何厚来孙战峰尹青春周奇盛李言明
何厚来 孙战峰 尹青春 周奇盛 李言明

关键词:速度表;里程表;校正;误差;GPS接收机
中图分类号:U463.7 文献标识码: A
0引言
车辆速度表、里程表校正是开展耐久试验测试前的常规环节,其目的是减小速度表、里程表示值偏差对试验车速、试验里程的影响,以确保测试标准的一致性。耐久性试验里程往往长达数万公里甚至数十万公里,里程表的细微偏差会导致统计的试验里程出现较大的偏离。耐久试验中各类特征路面有严格的行驶车速要求,车速的偏离会导致振动强度及频率的变化,从而影响试验强度。
速度表、里程表校正作业,就是通过检测出速度表、里程表指示值与实际速度和里程之间的偏差规律,通过拟合计算出校正系数并对试验结果进行校正。本文就车辆速度表、里程表校正实际作业过程中各环节产生的误差进行分析,剖析误差产生原因及其影响。
1测试方法因素
根据GB/T 12548—2016《汽车速度表、里程表检验校正方法》中4.1.2 部分对里程表校正系数的定义[1],里程表校正需要的2 个关键值为:里程表行走10.0 km 时车辆的行驶里程Lb 与安装于测试车辆上VBOX 测量设备记录的实际里程L 。为获得准确的车辆行驶里程Lb,根据国标中的方法要求,测试人员应在车辆里程表在接近10.0 km 时,降低车速至随时可以使车速降为零为止,以获取里程表数值从9.0 km(或9.9 km,不同车型有所差异)跳转至10.0 km 瞬间车辆的行驶里程Lb。
在实际测试中,由于测试人员从肉眼发现里程表显示值转变为10.0 km 至执行制动操作需要一定的反应时间,以及制动停车过程必然存在一定的制动距离,因此在此期间,车辆会存在一个移动的距离ΔL 。ΔL 可按以下方式进行计算:
ΔL=vt +v2/2a (1)
式中 t ——测试人员的反应时间,单位:s
v——车辆停车前的移动速度,单位:m/s
a——车辆制动时的减速度,单位:m2/s
根据统计信息,驾驶员的制动反应时间t 一般为0.3 ~ 1.0 s,取t =0.3 s ;制动前的车速为10 km/h(约为2.78 m/s),全制动时平均减速度取9 m2/s,根据式(1)可计算得出ΔL ≈ 1.26 m。
由于里程表的结构及指示精度限制,车辆在行驶ΔL 的距离后,里程表指示的里程指示值仍为10.0 km ;而在VBOX 测量设备显示的实际里程L 中,则是包括距离ΔL 。因此根据里程表校正系数计算,必然会导致里程表校正系数C 偏大。由于ΔL 的存在,在4 万km 的耐久性道路试验中,其造成的直接影响是统计的实际试验里程会偏小5 040.00 m。
根据GB/T 12548-2016《汽车速度表、里程表检验校正方法》中速度表的测试方法, 是使车辆速度表保持某一车速匀速行驶一段距离内, 然后计算平均速度值。再通过重复测试至少6 个速度点数据拟合出校正函数,从而推算出其他区间的速度表显示值与实际速度值的关系。由于VBOX 数据中时间与里程是完全同步关系,截取计算区间的长度理论上不会对结果造成影响,主要误差在于测试速度点的数量及分布、以及拟合计算。
以某车型的速度表设计策略为例说明:仪表单元收到车辆稳定系统控制(ESC)单元发送的实际车速信号后,会基于车速信号的基础车速进行一定比例的放大[2],再把放大后的车速信号发送至速度表面板驱动显示,以保证在源信号正确的前提下更可靠地满足GB 15082-2008《汽车用车速表》要求。其放大策略如下式表示:
V显示车速=V实际车速×k +c ( 2)
式中 V显示车速——速度表显示的车速
V实际车速——ESC 发动的实际车速
k——放大系统,取值为1.02~1.22
c——小于5 的常数
在0<V 实际车速≤ 10.0 km/h、10.0 km/h<V实际车速≤ 100.0 km/h以及100.0 km/h <V 实际车速共3 个区间内,k 、c 为对应的常数。由此可知,速度表设计策略中V 显示车速与V 实际车速为一条由3 段折线组成的函数关系。实际操作中,把6 个测试点进行线性拟合计算出其他预测值,这样拟合计算出的速度预测值与设计值会存在一定的偏差。这个偏差值比较小,在实际耐久试验中其影响不明显,GB/T 12548-2016 中选择线性拟合的方式,就已意味着可忽略该偏差的影响。
2 测试场地因素
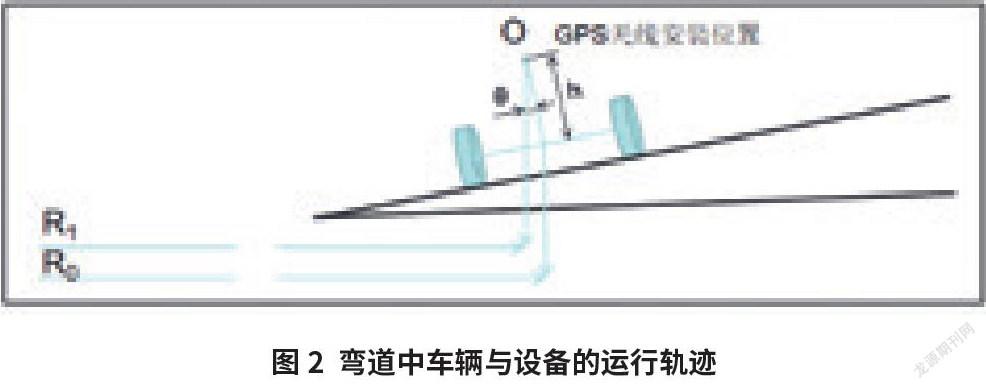
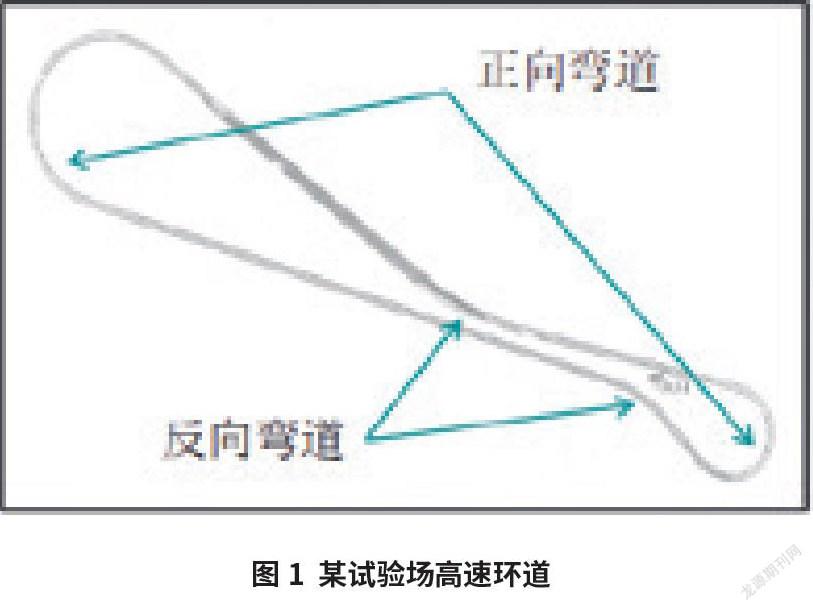
根据GB/T 12534—1990《汽车道路试验方法通则》中关于测试场地要求:测试应在清洁干燥、平坦的沥青或混凝土铺装直线道路上进行[3],道路长2.0 ~ 3.0 km, 纵向坡度在0.1% 以内。现实中各汽车试验场的测试道路均为环形结构,必然存在弯道,部分环道还有反向弯道(图1)。为了平衡车辆过弯的离心力,高速环道弯道位置的横截面处必然存在渐变的横向坡度。当车辆在横向倾角为θ 的车道行驶时,安装在车顶中部的GPS 天线运行轨迹与车辆运动中心在垂直方向的投影并非重合的,二者的相對关系如图2 所示。
本文为简化计算,暂以半圆形(弯道圆弧角度180°)为模型估算高速环道一侧弯道路行驶里程产生的误差。车辆在弯道中稳态行驶时,车道中心路面与水平面的倾角θ 即为车辆的倾角。由此造成的里程偏差ΔS 可计算为:
式中 h ——GPS天线安装顶面至车轮平面的垂直高度,单位:m
R 0——弯道行驶时车辆中心的转弯半径,单位:m
R1——弯道行驶时GPS 接收天线实际运行轨迹半径, 单位:m
测试道路中弯道内侧某一车道的环道半径取190.00 m,车道的车轮平面的与水平面夹角θ 约15°,常规乘用车辆天线安装顶面至车轮平面的距离h 一般为1.10 ~ 1.40 m,取h=1.10 m,根据式(3)计算出的误差值ΔS 为2.40 m。
同理,车辆在反向弯道行驶时, 也同样存在路面倾斜的影响。且车辆在反向弯道行驶时,悬架相对静止状态时处于拉伸状态,从而引起h 值增大,ΔS 亦随之增大。
车速表的测试标准明确只能在高速环道的平直路段进行,因此不受弯道的影响。
3测试设备因素
VBOX 测量设备是基于卫星信号,采用空间测距后方交会原理进行定位[4],其精度主要会受GPS 信号传播环节误差、GPS接收机的钟误差、天线相位中心位置偏差以及零点速度漂移等因素影响。忽略信号传播环节中大气层空间的不可控因素,传播环节的误差主要为多路径误差[5],是由于GPS 卫星信号在发射或传播过程中受环境因素的影响,使得接收到的信号中含有周围环境造成的反射信号。这种信号与直射信号出现干涉,导致接收信号的能量发生衰减且出现延迟,从而产生测距偏差。这种由于多路径信号传播所引起的干涉时延效应也称为多路径效应。
多路径误差的大小,取决于反射波的强弱和GPS接收机天线抗衡反射波的能力。多路径误差对点位坐标的影响在一般环境下可达0.05~0.09m ,在高反射环境下可达0.15 m。测试道路附近的高层建筑、高大树木、高架桥等均会产生反射波,因此测试道路两侧应为空旷开阔地带。
GPS接收机的钟误差主要与设备相关。天线相位中心位置偏差一定程度上受接收天线的倾角、运行速度以及车辆运行时的弹跳影响。在里程表校正过程中,测试车辆沿高速环道行驶时的速度值是呈一定范围内波动的,在基于GPS 卫星信号测试设备中的里程并非直接测量值,无论其算法构型采用黎曼积分还是勒贝格积分,其本质是基于速度时间积分法做累计运算。
v (t ) 曲线波动的结果是导致运算值必然存在因统计失实而产生的统计误差,通过无限缩小Δt 区间可提升运算结果的精确度,增加惯性测量单元、采用卡尔曼滤波等方法对数据进行处理有助于减小误差。因此在里程校核的过程中,应尽量按规定车速保持测试车辆的平稳运行,可降低天线相位中心位置偏差。在GB/T12548—2016 的第4.1.1 条规定了里程校正过程中,对行驶速度加以±2.0 km 的公差定义,其中就蕴含有统一测试标准、提升测试精准度之意。
此外,零点速度漂移也会对实际里程L 的数值产生影响。由于VBOX 的里程计算构型是基于速度时间积分算法实现的,车辆长时间停车时会因零点速度漂移形成累计里程偏差。因此,应在试验开始前才开始数据记录,在测试结束后尽快按下LOG 按键结束记录。当然,VBOX 测量设备在正式测试前均应进行充分的热机。
4 测试车辆状态及测试人员状态因素
测试车辆的轮胎磨耗程度、轮胎气压是直接影响速度表、里程表校正的一项重要因素。因此速度表、里程表校正一般都会安排在试验前进行。如果样车轮胎已经有明显磨损,应更换新轮胎后再进行速度表、里程表校正作业。轮胎磨耗程度、轮胎气压都会导致车轮的滚动半径偏离预设的滚动半径值,从而影响车辆的行驶里程Lb 以及V 显示车速的实际值。因此在进行校正前,一定要确认轮胎状态并使用符合要求的輪胎,且轮胎气压测量应在冷胎状态下进行。校正测试时的轮胎气压为,样车在该载荷工况下额定气压基础上再增加20 kPa。
5 减小误差的措施
根据速度表、里程表在校正过程中的影响因素分析,为减小误差,提升速度表、里程表校正结果的准确性,可采取如下措施。
(1)采用触发开关或读取CAN 报文的方式记录车辆的行驶里程Lb,即在量程表指示值到达10.0 km 瞬间使用触发开关进行标识,再读取原始记录,如此可消除制动停车距离导致的误差。然后可通过读取CAN 里程报文实时获取里程数据的方式,准确获得10.0 km 的里程报文节点时间,进而从原始记录中读取实际里程L 。此方法的前提是要保证报文的同步。
(2)测试场地环境:关注测试场地的周围环境维护,保证测试道路两侧周围保持空旷,避免高大树木等高大物体,防止对卫星信号形成反射干扰。
(3)提升测量设备的性能并确保测试设备的有效性。
(4)加强测试人员的培训,提高测试人员的操作熟练程度及反应速度。
(5)使用底盘测功机上进行速度表、里程表校正:行驶里程Lb、V显示车速可直接通过读取车辆仪表或CAN报文获取,实际里程L 、V实际车速可从底盘测功机的报文获取。此方法不需借助GPS卫星信号,校正作业误差主要受底盘测功机的最大允差影响,其误差可远小于在道路上车速表、里程表校正作业的误差。
6结束语
速度表、里程表校正作业方法虽然有一定的局限性,但目前仍为国内主要检测中心耐久性试验中车速控制和里程统计环节最常用、最便利的控制方法。随着GPS 定位技术的发展,利用GPS 定位技术并结合云计算技术统计汽车行驶里程以及测试过程数据的采集已经成为现实[6],并可根据需要对数据进行统计分析以实现对试验过程质量的监控。这种方法相对传统的速度表、里程表校正方法,更有利于确保测试标准的一致性。
不过,在长周期、场地变换频繁的耐久性试验中,利用GPS定位技术统计试验里程的技术在断点续传、以及信号稳定性方面还有一定的局限性。通过结合测试车辆CAN 报文的方法,在信号缺失的工况下使用测试车辆CAN 数据对GPS 定位统计系统的数据进行修正,未来会是提升GPS 定位统计技术的一个发展方向。这将为耐久性试验过程中的测试信息统计和质量分析监控的自动化实现跨越式发展。
作者简介:
何厚来,本科,工程师,研究方向为整车耐久性试验。
孙战峰,本科,工程师,研究方向为整车耐久性试验。
尹青春,本科,工程师,研究方向为整车耐久性试验。
周奇盛,本科,技师,研究方向为整车耐久性试验。
李言明,本科,工程师,研究方向为整车性能试验。
