潜艇旋回机动规避对声自导鱼雷发现概率的影响分析∗
2022-02-18付留芳许林周李文哲于丹丹
付留芳 周 明 许林周 李文哲 于丹丹
(海军大连舰艇学院水武与防化系 大连 116018)
1 引言
水面舰艇为了提高声纳探测距离通常使用主动声纳进行探测,主动脉冲易被敌潜艇截获,从而发现并确认水面舰艇,甚至解读我战术意图;此时,敌潜艇通常通过机动来规避我水面舰艇的探测,容易造成我水面舰艇难以对潜艇进行稳定跟踪。即使我舰声纳能够稳定跟踪潜艇,火控设备解算目标运动要素较为精确,潜艇在发现我舰发射鱼雷后,必然要采取机动规避,如果按照目标定速直航假设来解算射击诸元必会影响鱼雷的命中概率。
文献[1]基于声纳方程和能量检测理论,研究了潜艇速度、深度、航向变化,对目标辐射噪声和目标强度变化的影响,仿真计算了不同的潜艇航速、航向和深度,主动和被动声自导鱼雷对潜艇的发现概率,是一种静态的基于声纳方程的捕获概率计算。文献[2]确定了最有利航向作为潜艇规避机动航向,主要分析了海况与规避速度,规避速度与潜艇探测能力之间的关系。文献[3]通过建立目标旋回模型,采用蒙特卡洛仿真定量分析了潜艇机动规避航速、航向对空投声自导鱼雷命中概率的影响。水面舰艇管装鱼雷对潜攻击,需要根据目标的运动要素解算射击诸元,较直升机空投鱼雷攻潜情况更加复杂。文献[4]分析了火箭助飞鱼雷攻潜时,潜艇机动规避对不同射击方法命中概率的影响,但未考虑目标旋回机动时鱼雷自导作用距离的变化。
本文考虑潜艇采用旋回机动样式规避,引入规避时间系数和规避速度系数,建立了旋回机动模型,对敷设吸声材料的潜艇建立了检测模型,采用蒙特卡洛仿真定量分析了潜艇旋回机动对鱼雷发现概率的影响。
2 潜艇规避机动样式
2.1 潜艇对抗水面舰艇搜索的机动样式
潜艇在水面舰艇连续用主动声纳探测时,通常要采取机动规避的方式摆脱水面舰艇的跟踪。在浅海区,潜艇摆脱水面舰艇跟踪的机动航向通常采用脱离航向,将敌舰置于艇艉可听测舷角进行脱离机动。若潜艇在规避过程中听测到水面舰艇发射管装鱼雷入水,则会继续以背离态势旋回或直航。
2.2 潜艇对抗声自导鱼雷攻击的机动样式
潜艇和水面舰艇规避来袭鱼雷的最有效和常用的方法是旋回机动。旋回机动分“背雷转”和“向雷转”两种[5],各包括旋回开始时刻、旋回半径、旋回角度(停止旋回开始直航时刻)等要素。文中采用如下的机动策略,若发现鱼雷时,舷角小于或等于θ0,则潜艇应当采用最大低噪音航速同时打满舵转向鱼雷,将其置于θ1~θ2舷角,然后以最小低噪音航速驶离。在潜艇在大于θ0的舷角上发现来袭鱼雷时,应当背向鱼雷转向,然后按上述步骤行动[6]。
2.3 潜艇规避时间系数
潜艇的机动规避时刻是研究潜艇旋回机动最为关键的参数,在以往的研究中通常认为潜艇在鱼雷入水和正常提前角射击时期望相遇时间之间的某个时刻潜艇开始机动旋回。假设tx为按照正常提前角射击时鱼雷命中潜艇所需时间,规避机动开始时刻ts~U(0,tx)。
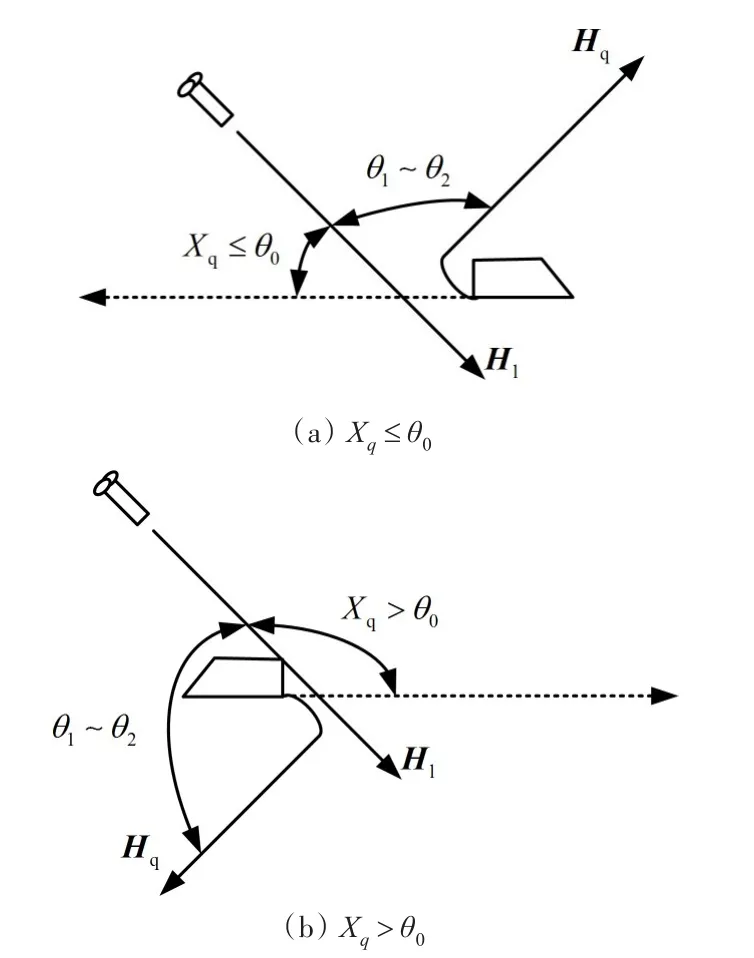
图1 潜艇规避来袭鱼雷的机动样式
为了定量描述机动时刻与鱼雷入水时刻之间的间隔,本文定义机动时间系数Cg,Cg∊[0,1]。潜艇的规避时刻在[0 , Cg*tx]之间服从均匀分布。
2.4 潜艇运动模型
假设鱼雷发射时刻t0,潜艇的距离方位为(D0,β0),以鱼雷发射点为原点建立直角坐标系,则潜艇在直角坐标系中的坐标为(x0,y0)。
假设潜艇进行单平面规避机动,潜艇的运动可以分为三段:定速直航、匀速旋回和定速直航。
潜艇在旋回机动前,坐标为

其中,v前直为潜艇机动规避前航行速度;c前直为潜艇机动规避前的航向;t前直为潜艇机动规避前定速直航的时间,t0≤t前直≤tx,Cg为规避时间系数。
其中Δt为仿真步进时间,ct为t时刻潜艇的航向。
潜艇旋回运动参数可根据下式确定。

其中,R的单位为m,ω的单位为°s。
旋回结束后,定速直航的过程略。
3 声自导鱼雷射击参数计算
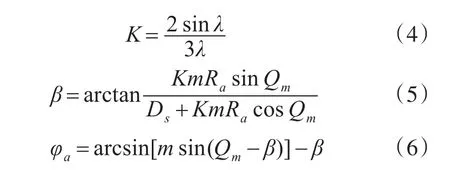
声自导鱼雷最为重要的射击参数是有利提前角,有利提前角的计算方法有:使相对移动线平分自导扇面搜索带的求解方法、使相对移动线平分相对移动线极限角的求解方法、形心法等,本文采用形心法计算有利提前角。形心法是将自导扇面的扇心作为遮盖中心,使得鱼雷自导扇面的重心与目标相遇。有利提前角可以通过式(4)~(6)进行计算[5]。
根据有利提前角,可以确定鱼雷出管后的航向cl。

鱼雷出管按照有利提前角确定的航向,直航搜索,假定鱼雷搜索速度一定,这里不考虑鱼雷出管后加速过程等。
则以鱼雷发射点为原点,建立直角坐标系,t时刻鱼雷的坐标为[7]

其中,vl为鱼雷的航速。
4 声自导发现概率计算模型
4.1 声自导检测模型
本文主要考虑主动声自导,在噪声掩蔽下的主动声纳方程为[8]

其中,SL为主动声自导发射声源级;TL为海水中的传播损失;TS为潜艇的目标强度;NL为噪声级,包含海洋环境噪声和鱼雷自噪声;DI为接收指向性指数;DT为自导系统的检测阈;单位均为dB.对于给定型号的鱼雷,SL,DI,DT在仿真可以认为是定值。
传播损失TL考虑为球面扩展损失和吸收损失之和,可以表示为

下面根据采用意大利A244/S型鱼雷的相关参数进行自导作用距离计,其中SL=210dB,NL=51dB,DI=20dB,DT=39.7dB,扫描损耗P=5dB,f=30kHz,t=20℃,自导扇面半开角为40°,对应可得声吸收系数α=4.6dB/km[9~10]。根据文献[5]中潜艇目标强度的近似计算公式,结合上述敷瓦潜艇在 f=30kHz时目标强度较未敷瓦潜艇降低14dB[11~12],可得潜艇的目标强度随敌舷角的变化。
根据上述设定参数,可得鱼雷自导作用距离随敌舷角的变化。
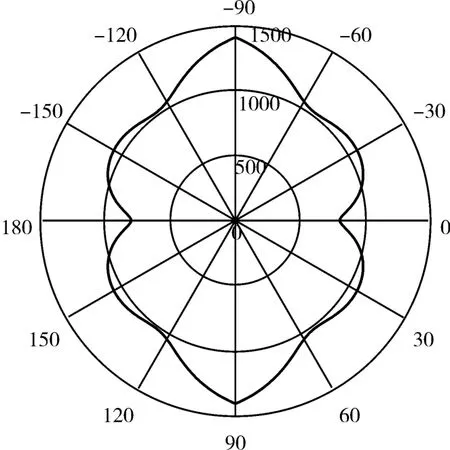
图2 鱼雷自导作用距离随敌舷角变化图
根据以上计算结果,本文认为潜艇进入鱼雷自导扇面即认为鱼雷能够发现目标,即满足以下两式。

其中,α为鱼雷方位线与鱼雷航向之间的夹角,λ为鱼雷自导扇面半开角,rml为目标和鱼雷之间的距离,r(Qm)为舷角为Qm时鱼雷的自导作用距离。
4.2 发现概率的计算方法
文中采用模拟法计算鱼雷的发现概率,若在N次射击中命中M次,根据蒙特卡洛法的基本原理,鱼雷发现概率就是发现次数M与总射击次数N之比,即

5 发现概率仿真计算结果与分析
5.1 态势设定
仿真条件设定,假定目标的初始距离为4000m,方位为30°,声纳测距误差300m,目标方位误差3°。鱼雷的平均航速为40kn,火控解算的潜艇航向航速分别为120°、8kn。误差分别为3°,2kn。采用蒙特卡洛仿真,仿真次数为2000次。
5.2 潜艇定速直航
图3为潜艇定速直航时,声自导鱼雷射击不同距离潜艇的发现概率,发现概率随着射距的增加由0.9975下降至0.7785。说明潜艇定速直航时,采用根据定速直航假设计算有利提前角方法射击,即使有较大的测量误差,凭借声自导鱼雷的搜索扇面,仍然有较高的发现概率。
图3 声自导鱼雷对定速直航目标的发现概率
5.3 潜艇在鱼雷入水后旋回规避
目标的机动时刻未知,这里根据正常提前角计算得到潜艇定速直航时和目标的期望相遇时间tx,认为潜艇的机动时刻在鱼雷入水和正常提前角射击时期望相遇时间之间服从均匀分布,采用蒙特卡洛方法仿真。
与上文类似,本文计算了不同射距下,鱼雷入水后潜艇旋回机动时,声自导鱼雷的发现概率,由图4可见,随着射距的增大,发现概率逐渐减小。对比潜艇定速直航时声自导鱼雷的发现概率,射距越远,发现概率较潜艇定速直航时的发现概率下降越快。
图4 对旋回规避目标的发现概率随射距变化曲线
5.3.1 发现概率与规避时刻之间的关系
图5为Cg从0.1变化到1时,不同射距情况下,发现概率随规避时间系数的变化情况。
图5 发现概率随规避时间系数的变化曲线
这与我们的直观理解是一致的,潜艇越早进行机动规避,则根据定速直航假设计算得到的鱼雷射击参数适用性越差,发现概率越低。在射距4000米时,目标在规避系数为0.5时,发现概率小于0.5。
5.3.2 目标机动速度与发现概率之间的关系
通常潜艇在规避来袭鱼雷时,会采取高速机动,这里定义机动系数Cs,即潜艇在机动规避时,航速为Csvm。由图6可见,随着规避速度系数增大,发现概率减小。与图5相比,规避速度对发现概率的影响较规避时刻相比对发现概率影响较小。
图6 发现概率随规避速度的变化曲线
5.4 潜艇在鱼雷入水前旋回规避
假设水面舰艇主动声纳进行最后一次潜艇方位距离测量与鱼雷发射入水之间的时间延迟为tdelay,认为潜艇的机动时刻在声纳最后一次探测和鱼雷发射入水之间服从均匀分布,即 t机动~U(0,tdelay),采用蒙特卡洛方法仿真,在不同射距和不同发射延迟时间时的发现概率如图7所示。由图可见,在射距大于3000m时,鱼雷的发现概率均低于0.3。
图7 发现概率随发射延迟时间的变化曲线
6 结语
文章针对鱼雷射击参数计算是基于目标定速直航为基本假设进行求解,而实际作战中目标通常会通过旋回机动规避来袭鱼雷这一问题,以意大利的A244/S鱼雷为算例,考虑潜艇目标强度随敌舷角变化,计算了潜艇旋回机动对鱼雷发现概率的影响。通过蒙特卡洛仿真计算,得到以下结论:
1)鱼雷入水后,规避时间系数越小,即潜艇机动越早,则声自导鱼雷发现潜艇的概率越低,尤其是潜艇在鱼雷入水时立刻开始机动,会使发现概率急剧降低。
2)规避速度系数越大,即增大潜艇的机动速度,会同时增大潜艇的旋回半径,会使鱼雷发现概率降低,且射距越远,降低越快,这一因素较规避时间系数影响较小。
3)鱼雷入水前潜艇旋回机动规避,若仍按目标定速直航外推计算射击参数,由于鱼雷发射延迟时间的存在,鱼雷的发现概率会降至0.3以下,随着射距增大发现概率降低。
根据以上结论,声自导鱼雷对潜艇射击时,应当考虑潜艇旋回机动,因此应对按照定速直航解算的射击参数进行一定的修正。基于潜艇旋回机动的有利提前角修正方法也是下一步需要研究的内容。
