基于TMS320C6455的弱小运动目标的检测跟踪算法的研究∗
2022-02-18王子瑜张长江周军华
王子瑜 张长江 周军华 李 强
(中国电子科技集团公司第二十七研究所 郑州 450000)
1 引言
目标检测跟踪算法在20世纪中期已经被提出,结合硬件平台FPGA和DSP,运用到了各个领域,尤其在军事方面。但是,伴随着科学技术的发展与进步,日益复杂的战场环境,对检测跟踪算法提出了更高的要求,所以对检测跟踪算法进行深入研究是非常必要的。
当前,我国有很多科研人员对目标检测跟踪算法进行了研究,如基于局域熵的图像检测跟踪[1],基于Top-hat的图像检测跟踪[2~3],基于块匹配的图像检测跟踪[4],基于多尺度的图像检测跟踪[5]等。这些算法都能很好地实现检测跟踪效果。但是在移植到DSP平台时,受限于DSP的处理速度、内存空间、外界场景等因素,有些算法移植效果并不是很好。
本文针对天空背景的弱小运动目标,根据TMS320C6455[6]的特点,将FPGA传输过来的1800*960像素的一幅图像,分四次从DDR上乒乓到DSP的芯片内部,这样有效节省了DSP存储的空间。然后采用偏微分[7~8]因子和帧间差分[9~10]因子相结合的算法,并对算法进行改进,减小了算法运行的时间复杂度,同时也提高了跟踪的准确度。
2 算法简介
DSP接收FPGA传过来的图像,然后进行检测,一旦的检测到目标,就转入跟踪模式,最后将目标坐标传给FPGA和原图叠加,显示跟踪效果。如果在跟踪模式下,目标丢失,那么就会转搜索模式,重新搜索目标。
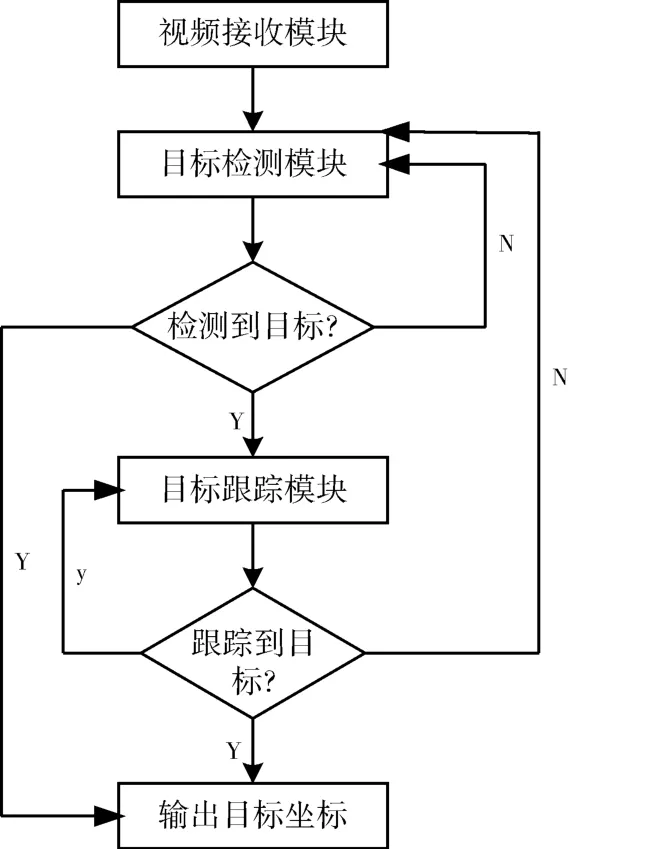
图1 检测跟踪总系统流程图
本文采用的检测跟踪算法,首先用偏微分因子和帧间差分因子进行图像处理,然后阈值分割,随后进行聚类[11]和管道滤波[12],最终得到目标。
帧间差分算法,就是将一个视频图像序列的紧邻两幅图像作差,从而得到运动目标的信息,滤除静态背景的信息。偏微分算法是根据目标信息和周边灰度背景之间的关系,对一幅静态图像进行背景抑制[13],从而分离出目标和背景。帧间差分得到的是一个动态算子,偏微分算法得到的是一个静态算子,将两者结合,能更好地凸显目标。
在进行图像处理后,下一步采用自适应阈值分割,分割公式如下:

e、v分别代表图像均值和标准差。n、k为常量,根据实际情况取。
对分割后的二值图像进行聚类。聚类就是对阈值分割后离散的点,按照横、纵坐标的空间位置,将空间相距比较近的一些点聚在一起,从而得到待选目标。
聚类完成后,采用管道滤波。管道滤波的原理是,真正的目标在一个小区域范围内是渐变的,而伪目标则是随机的,在监测多帧的基础上,就可以滤除伪目标,得到真正的目标。
3 算法改进
本文算法改进主要体现在以下两个方面。
1)从DDR上传输到DSP上的图像,采用四次乒乓方式,将一幅图像均分成4份,依次从DDR转存到芯片内。然后对搬到芯片内的1/4部分图像进行运算,存储运算结果,之后搬运另外1/4图像进入芯片内运算,以此类推。
TMS320C6455的L2数据存储空间为2M,本文要处理的图像为1800*960,一幅图像大约就占用了1.6M,在帧间差分计算时,为了提高计算速度,需要放两幅图像到L2,这样空间不够用。如果一幅图像采用均分成两次从DDR转存到L2,L2空间勉强够用,但是在搜索模式下,后续代码和数据存储空间就会显的紧张。如果一幅图像采用均分成8块或者更大的块数,从DDR转存到L2,L2空间虽然充足够用,但是在近距离检测跟踪目标时,由于目标相对较大,得到的感兴趣区域就会较大,这样感兴趣区域,有可能在图像上占用多个图像块,反而不利于目标图像跟踪。实验表明,一幅图像均分成4次从DDR转存到L2,既能满足算法数据在L2上的存储需求,也能满足目标检测跟踪的需求。
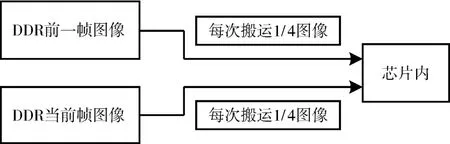
图2 从DDR搬运图像进入芯片内图示
2)算法一旦检测到目标,就转跟踪模式。跟踪模式所采用的算法和检测模式一样,只是检测模式下,是全局搜索,跟踪模式下,是感兴趣区域内搜索。在检测到目标的坐标以后,根据得到的目标的中心位置和长、宽,得到一个以目标为中心的感兴趣区域,本文采用感兴趣区域的长和宽分别是目标长、宽的8倍。
一幅图像被均分成4块传到芯片进行跟踪,在得到感兴趣区域的左上角坐标以后,在坐标所在的块上进行感兴趣区域跟踪,同时,为了避免目标中心坐标在分块的边界上或者在下一块中,本文采用对下一块进行全局搜索。即如果感兴趣区域左上角坐标在第一块上,那么就在第一块的感兴趣区域进行跟踪,在第二块上全局检测搜索,第三块和第四块不处理。依次类推。本文只在相邻块上进行搜跟,是因为目标一般情况不会分布在分割的三块上。
采用这种方式进行跟踪,一幅图像最多被处理1/4,外加一个感兴趣区域。相比于一幅图像均分成两次,改进算法大大减少了计算量,提高了运算速度,同时相比于一幅图像均分成8次或者更大的次数,该改进算法提高了跟踪的准确度。

图3 算法改进后的一次跟踪流程图
4 试验和结果分析
本文是在天空背景下飞无人机,进行了两组试验。
第一组试验是分别将一幅图像均分成2、4、8块传到L2,一块进行感兴趣区域跟踪,相邻的下一块全局搜索。
第二组试验是一幅图像均分成4块传到L2,然后用改进的方案和传统方案进行对比。
改进的方案采用一块进行感兴趣区域跟踪,相邻的下一块全局搜索;传统方案采用一块进行感兴趣区域跟踪,另外所有的块进行全局搜索。
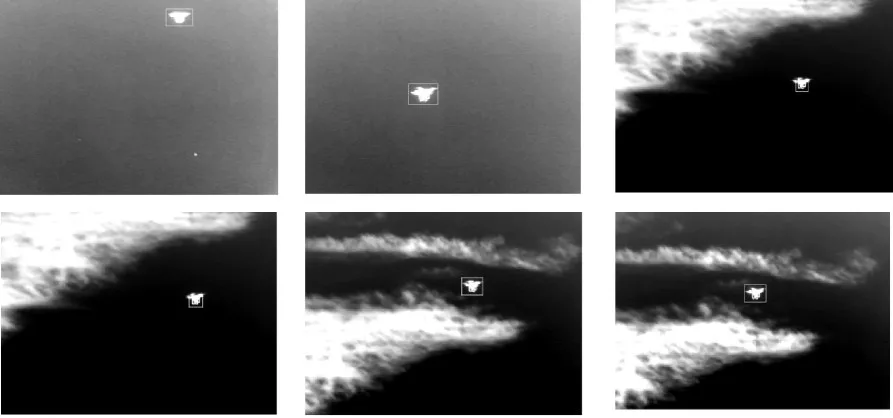
图4 试验视频截图

表1 试验对比结果

表2 试验对比结果
试验结果表明,采用一幅图像被均分成4块传到L2,相比于均分成两块,跟踪准确度没有下降,但是跟踪时间和占用空间都大幅缩小,避免了处理时间过长(系统要求一帧处理时间不能超过40ms),出现的漏帧现象;相比于分成8块,虽然跟踪时间和占用空间略大,但也能满足DSP处理需求,同时跟踪准确度相对提高。将一幅图像被均分成4块传到L2,通过对比改进方案和传统方案,发现跟踪时间上,传统方案不能满足需求,会出现漏帧现象。
5 结语
本文在TMS320C6455的基础上,根据DSP的特点,对弱小运动目标进行检测跟踪,试验结果表明,本文的改进算法,在保证了搜跟准确度的基础上,不但降低了空间复杂度,满足了芯片的空间要求,而且能缩减运行时间,满足系统对处理一幅图像的时间要求。
