基于机器人技术的道路病害自动化检测系统应用研究
2022-02-18侯海涛范洪祥程棋锋吴晚霞钟新然
侯海涛,邱 雄,范洪祥,程棋锋,刘 斐,吴晚霞,钟新然
(1.厦门市公路事业发展中心,福建 厦门 361000;2.合诚工程咨询集团股份有限公司,福建 厦门 361009;3.上海圭目机器人有限公司,上海 200082)
我国公路建设发展迅猛,截止到2021 年,全国公路总里程约为520 万km,稳居世界第一。随着公路运行时间的增长,公路病害逐渐增多并日趋严重,影响到了公路使用性能及驾驶安全。因此,维持良好的公路结构状况是安全驾驶的重要保障。为了全面评估公路结构的受损情况,在针对性地养护或维修计划之前,公路病害检测是评估当前公路结构状况的一项重要工作。
目前公路病害检测报告主要是通过人工实地抽样检测的方式来统计的,越来越难以满足当前庞大的公路检测需求。同时,人工检测手段主要依赖检测人员的经验及专业知识水平,存在主观性强、精度差、易漏检和效率低等诸多问题[1]。因此,国内外学者及工程师对公路自动化检测技术进行了大量研究及探索。黄建斌[2]以线阵相机为路面数据采集模块的核心,设计了高速公路系统路面破损数据自动检测装置,并研究了剔除油污等干扰信息的数据预处理方法。黄娟[3]根据高速公路路面检测相关指标,研究了路面破损、路面平整度、路面车辙、路面结构强度、路面抗滑性5 个方面的自动化检测技术。BICICI 等[4]在研究中利用无人机自动采集了路面三维点云图像,并从三维点云中提取路面纹理信息,用于路面病害快速调查和检测。
近年来,随着自动化检测技术的不断发展,各种道路综合检测车开始逐步应用于公路检测作业[1,5-7],如日本Komatsu 系统[8]、美国DHDV 系统[9]、中国的CiCs 检测车[10]等。相较于人工检测,道路综合检测车的检测效率显著提升。同时,由于道路综合检测车集成了自动化检测设备(如工业面阵相机、探地雷达等无损检测传感器),其检测结果的准确性和可靠性均优于人工检测。在公路病害定位方面,目前道路综合检测车主要依赖于里程计及公路桩号,病害的定位精度大约在米级,可以为后续维修养护施工提供公路病害的大致位置。另外,由于传感器的检测宽度有限,道路综合检测车单次作业一般无法覆盖整个车道范围,对于工作人员的驾驶技术也有较高要求。
为了进一步提升道路病害检测的自动化及智能化水平,同时提供更精准的道面病害定位信息,本研究设计研制了面向道路病害检测任务的检测机器人系统。该道路检测机器人搭载了工业相机及三维探地雷达,可在指定的道路检测区域开展全覆盖的自主检测作业,全面获取道路表观病害及结构病害信息,并在福建省某公路主干道开展了实际的工程应用。
1 道路检测机器人系统设计
1.1 机器人系统总体概览
道路检测机器人的总体系统架构如图1(a)所示。系统由多功能运输车及检测机器人本体组成。多功能运输车除了将检测机器人运输到检测场地外,其内部还设置了远程控制台,集成了机器人远程监控系统和检测数据分析系统。多功能运输车和道路检测机器人通过WIFI 无线网络或4G 网络进行通信。

图1 道路检测机器人系统总览
道路检测机器人的检测设备及传感器配置如图1 所示。机器人配置了一台工业面阵相机来采集道路表观图像。为了采集道路内部结构层信息,在机器人后方设置了八通道的三维探地雷达。考虑到道路检测过程中可能会有不可预知的车辆及人员进入检测区域,机器人机身的前部安装了2 台用于及时避障的激光雷达。无线网关(AP)天线和GPS 天线分别设置在机器人顶部周围。
在道路检测任务中,检测机器人以自主检测作业的方式,利用搭载的工业面阵相机及探地雷达设备分别采集检测区域内的道路表观和结构层数据,并结合高精度的位置信息生成检测区域道路表观和内部结构的三维模型。最后,通过检测工程师并结合基于深度学习的病害识别算法进行检测数据分析,可直观、快速地获取道路表观及内部结构病害。
1.2 机器人结构设计
基于模块化的机器人设计思路,道路检测机器人本体结构由轮式运动底盘、主体机身以及外围传感器系统组成,如图2 所示。
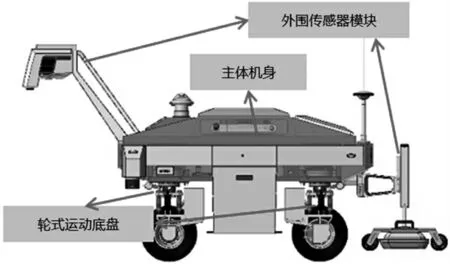
图2 机器人本体结构设计
轮式运动底盘采用了四转四驱的轮式设计,4 个驱动轮均配置了独立的转向和行走电机,可以实现独立转向和前后运动控制。机器人移动时,4 个独立悬挂装置保证了路面不平整时车身的稳定性。
主体机身通过模块化机械接口安装在运动底盘上,功能区域包括下沉式的锂电池舱、通信模块、定位和导航模块以及工控机及控制系统舱。外围传感器模块由不同的环境感知模块和数据采集模块组成,环境感知模块包括全景监控相机和激光雷达,检测模块则包括面阵相机、三维探地雷达及相应的机械支架。
1.3 机器人控制系统
控制系统主要包括电气系统、运动控制系统、通信系统以及定位导航系统4 个部分,所有硬件设备均集成在机器人主体机身中。
运动控制系统硬件主要由工控机主板、交换机及电机驱动器组成,主要负责机器人在检测过程中的运动、行为控制。总体控制流程如图3 所示。在检查任务开始时,工控机系统通过WIFI 或4G/5G 信号从机器人远程监控系统接收检测作业任务信息。为了实现高精度的定位和导航,获取差分GPS 模块、惯性传感器单元和车轮上的编码器等多传感器数据,通过扩展卡尔曼滤波器(EKF)进行融合,计算得到机器人当前的运动状态和位置信息。定位导航系统通过RS232 串口与工控机进行通信。机器人导航算法通过计算目标轨迹的位置偏差和方向偏差解算出运动底盘速度及角速度的控制指令,并通过以太网将控制指令发送到4 个车轮的底层控制系统,实现底层运动控制。路径规划和运动控制算法已实现并集成在工控机上。环境传感器(激光雷达、监控相机)和检测传感器(面阵相机、探地雷达)通过以太网将采集数据传输至工控机。检测过程中机器人即时运动状态及检测采集信息会通过以太网传输至远程监控系统。

图3 机器人控制系统框架
2 检测作业流程及病害评价方法
2.1 道路检测机器人作业流程
为了保证相机和雷达采集数据可靠,检测工程师需要根据作业时的天气、光照和路面情况对相机和雷达进行初始参数设置(如增益调节等)。在明确道路检测区段后,工程师还需根据当前车辆流量及道路复杂情况分段划分检测区域,并在远程检控系统上创建检测作业任务。详细的现场作业流程如图4 所示。
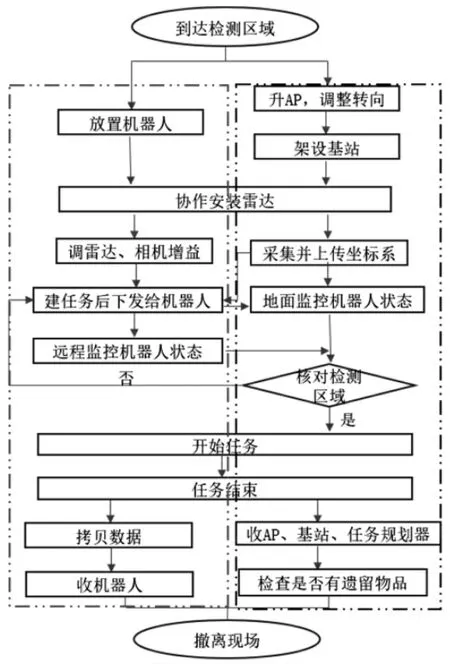
图4 现场作业流程图
2.2 道路损坏评价方法
道路检测作业结束后开展检测数据分析及道路损坏评估工作。道路损坏评估包括表观和结构层两方面:一是参照现行的公路评定标准规范,利用相机采集到的表观图像判别道路表观病害;二是结合隐性病害的波形特征,利用探地雷达采集到电磁波的反射波图谱判别道路内部隐性病害。
2.2.1 表观病害评价
现行的《公路技术状况评定标准》(JTG 5210-2018)对道路表观病害做出了明确的分类和评定[11]。水泥混凝土路面的病害主要包括裂缝、破碎板、板角断裂、错台、拱起、边角剥落、接缝料损坏、坑洞、唧泥、露骨和修补11 个类别。沥青路面的病害包括龟裂、块状裂缝、纵向裂缝、横向裂缝、沉陷、车辙、波浪拥包、坑槽、松散、泛油和修补11 类病害。
表观图像数据处理时,工程师参照《公路技术状况评定标准》,在检测数据分析系统上对道路各类表观病害进行判定和标注。此外,还开发了基于U-Net 模型的道路多类型病害语义分割算法[12]并集成在检测数据分析系统,可对道路病害进行初步的快速筛查。基于深度学习模型的自动识别算法与人工标注相结合,进一步提升了道路表观病害的评估效率和准确性。
2.2.2 结构层隐性病害评价
探地雷达广泛应用于地质勘探行业中,其原理是利用高频电磁波的反射波形来探测地下目标体[13-14]。近年来,随着高频微电子技术及计算机信号处理技术的发展,探地雷达开始逐步应用于道路层厚检测等公路检测中[15]。
基于探地雷达波特征的地下病害识别方法一般是根据正演规律推断某些病害特征的波形、振幅、相位与频率的变化等,然后根据现场探测得到的反射波信号来反演道路内部形态,以此评估和判断隐性病害的位置和类型。常见隐性病害探地雷达波波形见表1。
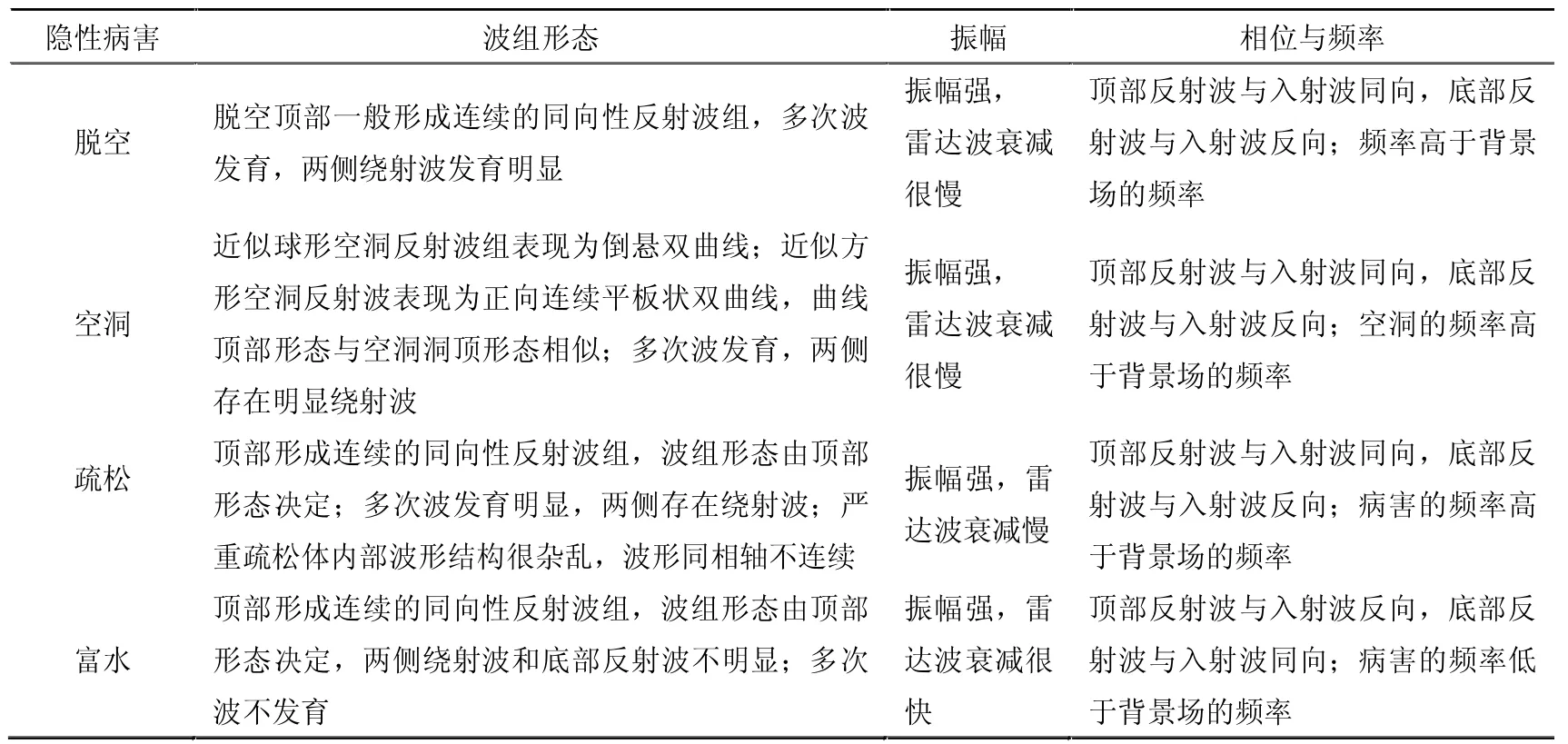
表1 典型隐性病害波形特征
3 工程应用案例
3.1 作业场景及检测结果
为了验证道路检测机器人系统在公路病害自动化检测业务中的实际使用效果,在福建省厦门市某公路主干道开展了工程检测作业。检测区域地图及作业场景如图5 所示。两段检测区域长度约1 500 m,宽度约20 m,检测面积共30 000 m2。本次检测任务主要是检测道路内部隐性病害情况,并根据病害识别的类型及定位结果进行道路开挖验证。

图5 机器人现场检测作业
道路作业区域内共检测出结构层隐性病害4 处,包括富水、疏松、脱空和内部裂缝各1 处。病害统计情况见表2。表2 中:G 为脱空,L 为疏松,C 为裂缝,J 为基层,D为底基层,T 为土基层。

表2 隐性病害检出结果
3.2 探地雷达波形图谱及开挖验证结果
3.2.1 富水病害
富水病害在雷达图谱上剖面表现为多处波组反射,频率较低,能量变弱,在切片图上表现为一处能量比周围背景明显强的区域,如图6(a)所示。依据探地雷达数据的位置信息,经现场定位开挖,挖至土基层时开始出现水,挖到1 m 时积水已经有近10 cm 深,图6(b)为开挖时的现场照片。

图6 富水病害的探地雷达波形图及开挖验证结果
3.2.2 疏松病害
疏松体是土体或结构体不密实的状态,里面含有大量的空气或水,在雷达剖面图上表现为多次波,绕射明显、杂乱,在切片图上表现为能量比周围背景场明显强烈,出现黑白相间的区域。图7(a)为检测出的一处疏松体病害,病害起始深度约1.2 m。经现场定位后开挖,在开挖区域发现一处疏松体区域,土质明显松动,密实度很差,开挖时发生塌陷,见图7(b)。
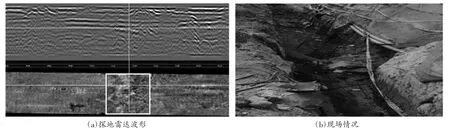
图7 疏松病害的探地雷达波形图及开挖验证结果
3.2.3 脱空病害
道路中的脱空病害主要表现为硬质结构之间或硬质结构与土体之间的缝隙,一般在探地雷达图中表现为平板状多次波组,因脱空处含水或空气,所以多次波能量较强,出现明显的黑白相间波形,在切片图上出现或全黑或全白的整个区域。本次作业检出的脱空病害雷达图见图8(a)。开挖后发现该处脱空为电缆井,电缆井在开挖时被破坏,导致脱空区域发生坍塌,见图8(b)。
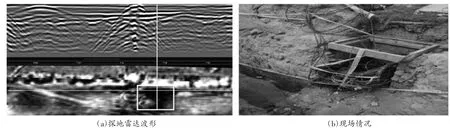
图8 脱空病害的探地雷达波形图及开挖验证结果
3.2.4 内部裂缝病害
裂缝病害在雷达剖面图上呈现正向或斜向脱空的状态,在切片图上呈现裂缝到实际走向特征。在理论上是一种脱空病害的表现,但是因为裂缝有其自身的特点,比如贯通性、条带状发育等,故专门列出。本次作业检出的裂缝病害雷达图见图9(a)。现场挖掉面层后,在定位区域的基层发现一条明显的横向裂缝,现场照片见图9(b)。
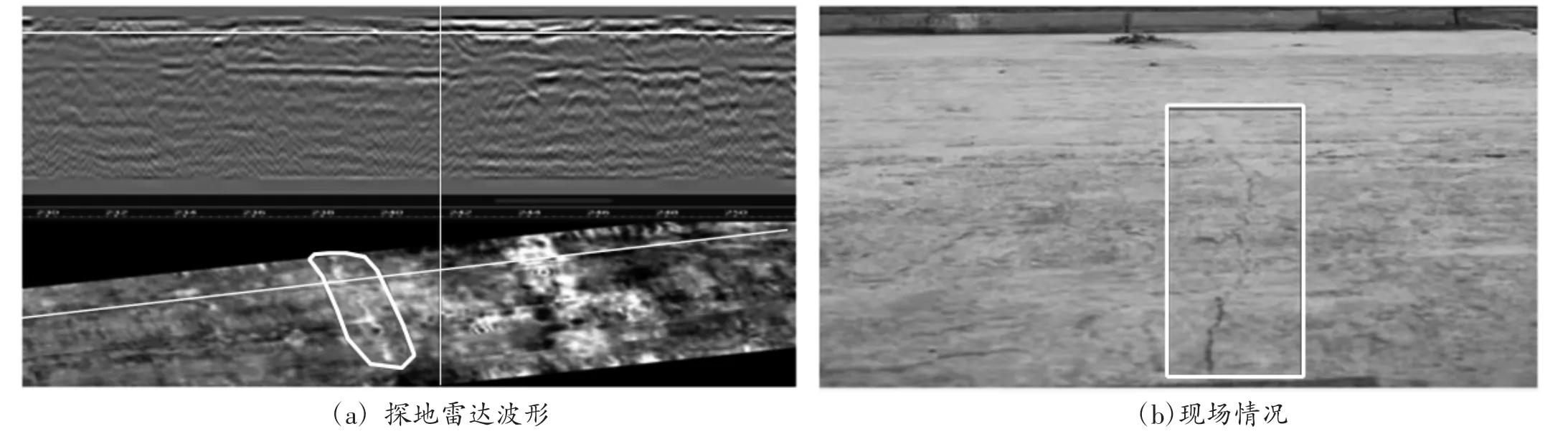
图9 内部裂缝病害的探地雷达波形图及开挖验证结果
4 结论
针对公路病害状况的自动化检测需求,基于机器人技术并结合探地雷达应用技术,研制了道路病害检测机器人系统。道路病害检测机器人通过自主定位导航及任务规划,可以实现在指定检测作业区域内的全覆盖检测,自动采集道路表观图像数据及结构层数据,为后续病害分析提供高质量、高精度的检测数据支撑。将道路检测机器人系统应用于实际的道路检测作业中,并将病害检测结果与现场开挖结果进行对比,进一步证实了检测系统的可靠性。
在实际使用中也发现了道路检测机器人系统的一些改进方向,比如:(1)现有任务规划算法对复杂弯曲道路的适应性还有待提升;(2)现有的基于面阵相机的表观检测模块难以识别错台、车辙等空间类型的表观病害。因此,未来的研究目标将继续提升检测机器人轨迹规划和导航算法,并扩展激光点云、3D 相机等检测模块,进一步提升系统在公路病害自动化检测业务中的适应性和准确性。
