基于BIM+智慧工地平台的桩基施工进度管理方式*
2022-02-18张志伟曹伍富苑露莎刘玉双
张志伟 曹伍富 苑露莎 刘玉双 张 立 周 轶
(1.北京市轨道交通建设管理有限公司,100068,北京;2.城市轨道交通全自动运行系统与安全监控北京重点实验室,100068,北京;3.中铁电气化局集团有限公司,100036,北京;4.北京市轨道交通设计研究院有限公司,100068,北京;5.北京市轨道交通工程技术研究中心,100068,北京∥第一作者,建筑师)
施工进度管理是建设工程三大控制目标之一。每一项工程都有严格的工期要求。为了保障工程项目能根据施工进度按时完成,就必须分析该项工程的施工工艺,采取必要的施工进度控制措施,合理安排一切资源,在保证质量的前提下,保证施工进度,节约成本[1]。
采用基于BIM(建筑信息模型)技术的桩基定位方法,测量人员只需在手机上查看数据并直接输入全站仪进行放样,通过模型查看数据并与现场数据进行比对,能够全面提高桩基放线定位及复核效率,效率提高至少20%[2]。在《住房和城乡建设部工程质量安全监管司2020年工作要点》中也提到:“推动BIM技术在工程建设全过程的集成应用,开展建筑业信息化发展纲要和建筑机器人发展研究工作,提升建筑业信息化水平[3]。”
基于Dynamo软件进行桩基模型创建、桩基编号、桩基进度上报等成套技术的研究尚处于空白。本文以北京地铁19号线一期工程新宫车辆段桩基施工为例,以BIM参数化建模为基础,通过Dynamo软件可视化编程和智慧工地平台建立了一套桩基进度管理的BIM工作流程。该流程可在减少人员和时间投入的情况下大幅提升工作效率。
1 新宫车辆段桩基施工进度管理难点
新宫车辆段为北京地铁19号线一期工程唯一的车辆停放、检修基地,占地面积30.05 hm2,建筑面积246 478 m2,共有运用库、联检库和物资总库等17个单体。该车辆段桩基施工的合同工期为2016年9月1日—2020年12月20日。该车辆段桩基施工进度管理的特点、难点如下:
1)桩基数量多、工期短,无特殊原因需昼夜不间断连续施工。
2)桩基施工时,现场实际进度与上报进度有一定的时间差,上报进度往往滞后于现场实际进度。
3)形象进度只能反应整体进度数据,不能反应某个单体的某一区域进度情况,表达方式不够清晰。
4)施工过程中的质量问题记录存在缺失现象,因此无法对问题部位进行快速精确定位,难以对施工质量进行溯源。
5)资料整理和数据整理的工作量较大,占用时间较多,使相关人员不能专心于施工现场管理。
2 车辆段桩基施工进度管理现状问题分析
车辆段桩基施工进度表示主要以形象进度百分比法和图纸标记法为主,存在的问题主要表现在以下两个方面:
1)形象进度百分比法能够展示整体完成率,但是却不能显示某个流水段已完成的数量,且需要手动统计已完成的总数,容易造成漏报、错报。如“联合检修库桩基1 689根,已完成635根,完成37.60%”。
2)图纸标记法能够形象展示施工区域内的进展情况,但是,手动涂画存在错涂、漏涂的可能;每根桩的施工日期需要手动填写一次,这增加了技术人员的工作量,也使进度数据查阅不方便,使进度信息无法高效协同。同时,手动修改若出现涂抹,则会影响查阅体验。
3 基于BIM+智慧工地的车辆基地桩基施工进度管理方式
通过BIM信息平台,工程项目的各参与方能够及时更新和修改模型中的信息,实现各参与方的协同合作,实现工程项目的集成化管理[4]。在实际的车辆基地桩基施工过程中,BIM工程师通过BIM软件进行桩基建模,通过Dynamo软件快速提取桩基的几何数据、坐标信息和结构材质等信息,通过Excel表格或者CAD(计算机辅助设计)图纸向项目测量工程师和土建工程师提资。土建工程师和测量工程师利用BIM软件输出的资料进行现场施工作业,使用智慧工地平台软件快速填报桩基的施工进度信息。
新宫车辆段桩基施工项目以Autodesk Revit为BIM基本建模软件,以Dynamo for Revit为快速建模和数据处理软件。通过Dynamo软件帮助用户实现具有互操作性的工作流程文档管理,以及自动的模型创建、协调、模拟和分析[5]。
3.1 BIM模型创建
以新宫车辆段联合检修库为建模对象,该检修库有两种类型的桩,即ZHA-1桩和ZHA-2桩。ZHA-1桩的桩长为22 m,桩径为1 000 mm;ZHA-2桩的桩长为32 m,桩径为1 000 mm。基于Autodesk Revit 2016软件,通过Dynamo软件对桩基进行快速建模。
3.1.1 桩基模型创建
采用Dynamo for Revit软件智能识别图纸中的圆形来创建桩基模型。具体操作如下:
1)清理CAD图。仅保留桩基图形和桩顶高程说明,然后将CAD图导入Dynamo for Revit软件并将CAD图完全分解。在Dynamo for Revit软件中框选导入的CAD图形,以获取桩位信息。
2)利用Circle.Center Point软件求出圆形的中心,即桩位点坐标。由于某些CAD图在完全分解后,会在相同位置上出现两个或者多个圆形,所以要对圆心进行一次公差范围内的清理。一般视觉上同一位置的多个圆的圆心坐标相同,少部分可能会有少于1 mm的偏差。在本工程中采用1 mm的公差范围,即将圆心坐标在1 mm内的偏差视为相同位置,清理后只保留一个坐标。处理方法如图1所示。

图1 获取圆心并在公差范围内清理重合的点
3)获取圆形的半径。在CAD图中,存在圆形的半径不是整数的情况,因此对半径进行四舍五入后计算半径的唯一值;将该值乘以2即可得到桩径;将桩径转换为对应的文字,并加上前缀、后缀,通过示例构件类型创建新的构件类型。
4)获取半径值在半径唯一值中的索引,用来确定每根桩的构件类型。然后通过对应的坐标创建桩基模型。快速创建桩基流程图如图2所示。
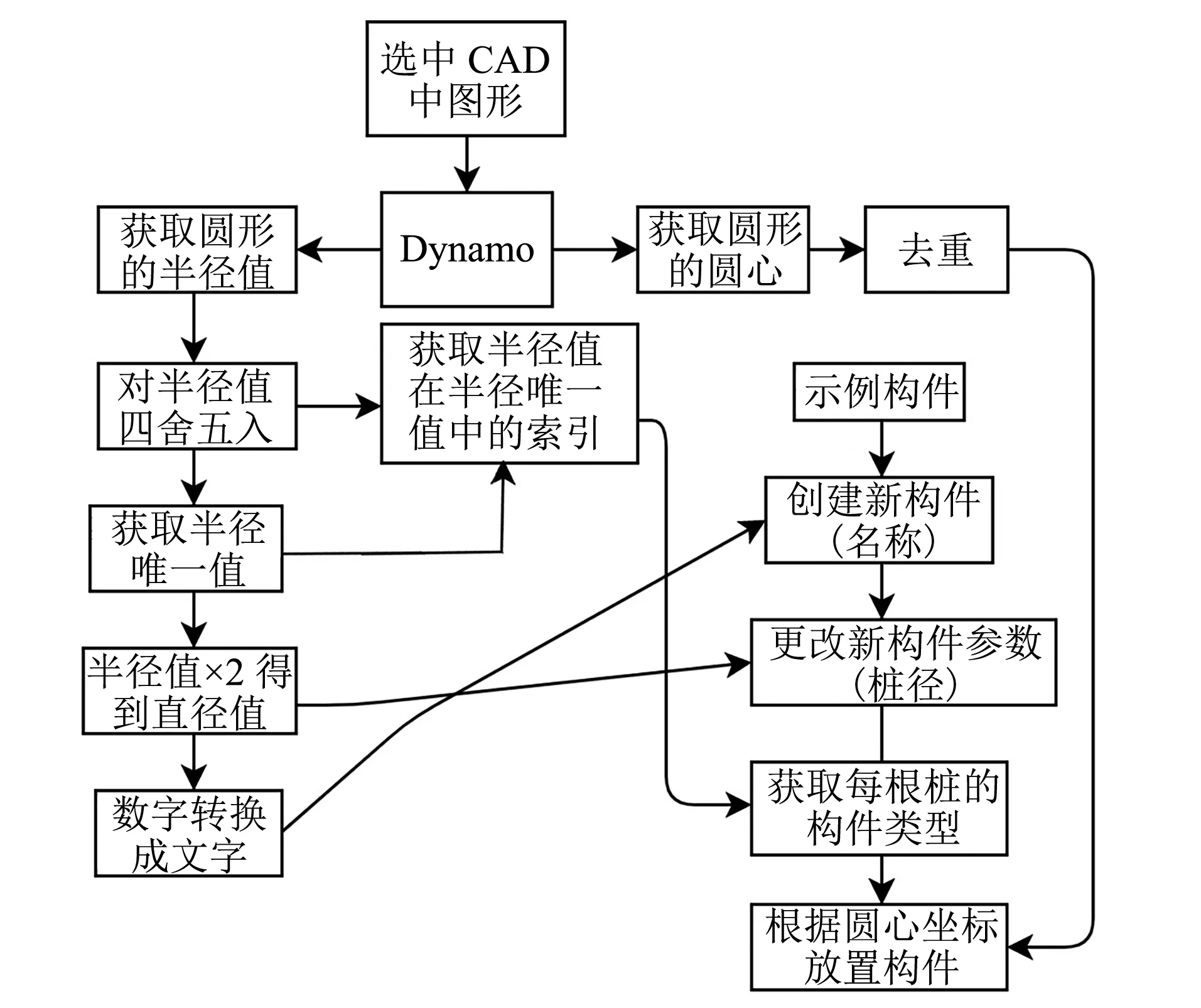
图2 快速创建桩基模型流程图
3.1.2 按规则对桩基进行编码
完成桩基快速建模后,需对桩基按照一定规则进行编号。这部分桩基施工准备阶段工作对于工程技术人员来说是非常耗时和枯燥的。使用Dynamo软件可以快速完成桩基编号。
新宫车辆段联合检修库桩基编号规则为:桩长22 m桩的编号前缀为LD,桩长32 m桩的编号前缀为LC。前缀相同的桩的排列方式为“W”形排列,如图3所示。

图3 前缀相同的桩按照“W”形排列
1)框选要编号的双排群桩模型。对于双排群桩,奇数排桩在Revit软件坐标系的x轴上的值(N)总是大于偶数排的值。获取桩基坐标的x轴上的值并按其大小排序;获取这个新排列的坐标在原坐标列表的索引,再使用索引值对框选的桩基进行排序。将新的桩基列表等分成两份,完成对奇数排和偶数排桩的分离。
2)无论是奇数排还是偶数排桩,桩基在Revit软件坐标系的y轴上的值(E)总是左边的小于右边的,因此需要对两排桩分别按y轴上的值进行排序,并按照新的索引重新对桩基进行排序。
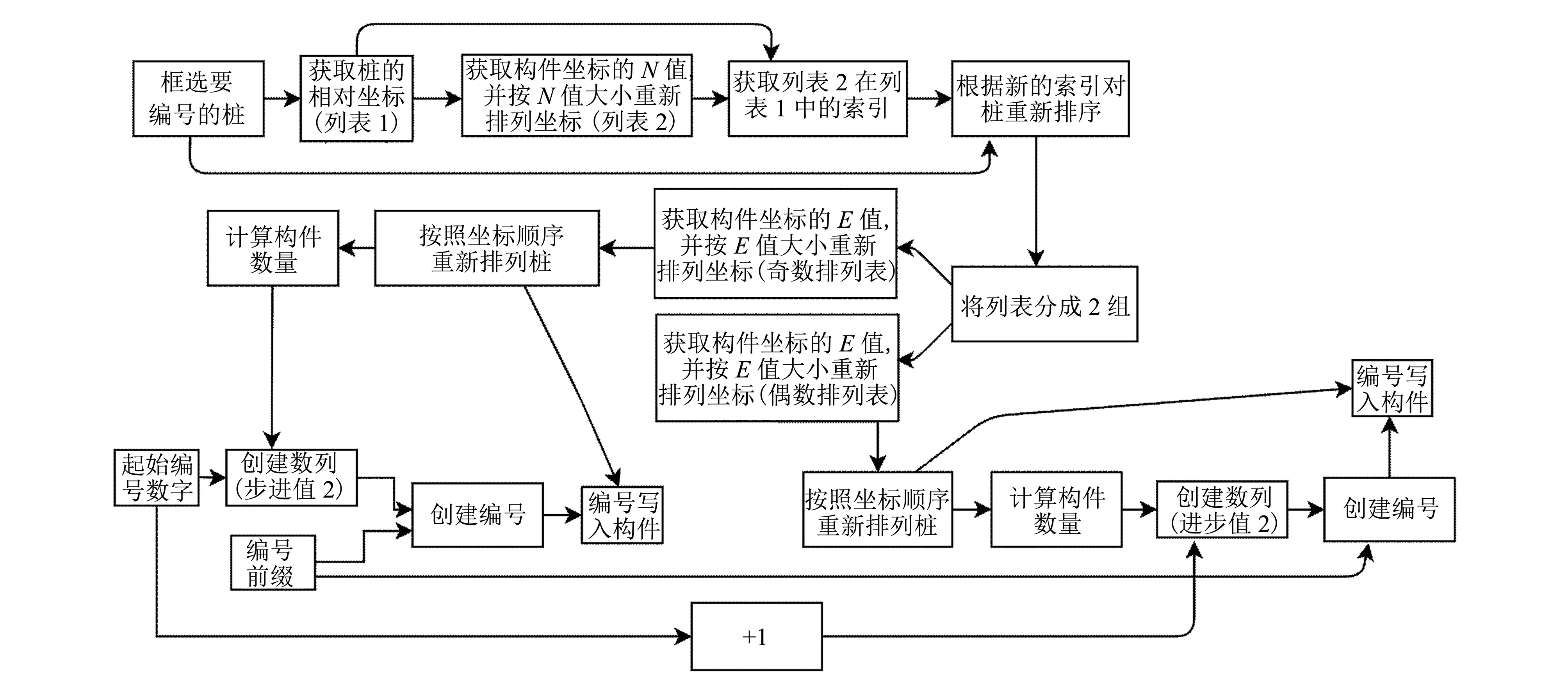
图4 快速桩基标号流程图
3)创建一个数字列表,奇数排桩编号起始值为桩基的第一个编号,偶数排桩编号起始值为奇数排桩编号起始值+1。数列中数值的数量可以通过List.Count软件获取的桩基数量确定,List.Count软件的步进值为2。将生成的数字序列转换为文字序列,并添加编号前缀后生成新的文字序列,并将文字写入到Revit软件桩基的“桩编号”参数中。
3.1.3 生成桩基放样数据
完成桩基编号后,需获取桩基坐标才能用于最后的施工放样。因Revit软件除了项目基点和测量点外还存在内部原点这一概念,所以在Dynamo软件中使用Element.GetLocation软件获取到的坐标为基于内部原点为坐标系的坐标(内部原点坐标永远为(0,0,0))。而一般情况下项目基点与内部原点是完全重合的,因此在Dynamo软件中直接使用Coordinates.BasePoint软件获取到的项目基点坐标为(0,0,0),这显然与想要的结果不一致。通过分析项目基点、测量点和内部原点,创建如下数学模型。
图5为项目北与真北重合的理想状态,项目O内部坐标为(0,0),点P内部坐标为(x1,y1),由此可以得出点P到y轴的距离为x1、到x轴的距离为y1。已知项目基点真实坐标为(x,y),由此可以求出点P的坐标为:x2=x+x1,y2=y+y1,即点P的真实坐标为P(x+x1,y+y1)。
很显然,理想状态下的模型不常有。一般情况下,建筑物的项目北与真北有一个夹角θ。将图5中的模型以项目基点O为轴旋转一个角度,结果如图6所示。

图5 项目北与真北重合坐标模型

图6 建筑物与真北旋转一定角度模型
由图6可见,点P的新内部坐标为(x3,y3),此点到项目基点坐标系(细线坐标轴)的x、y轴的垂线长度仍为x1和y1。点P的真实坐标为:x4=x+a1+a2,y4=y+b2=y+b-b1。根据三角函数可得出:a1=y1sinθ,a2=x1cosθ,b=y1cosθ,b1=x1sinθ,由此可以得出点P的真实坐标为P(x+y1sinθ+x1cosθ,y+y1cosθ-x1sinθ)。Dynamo软件计算桩基真实坐标流程图如7所示。
获取Revit软件模型中所有桩基构件。然后获取Revit软件中项目基点的真实坐标和到正北的角度。根据图6原理,使用Dynamo软件中的Python软件编写计算桩基真实坐标的程序。将真实坐标分别写入到Excel和Revit软件桩基构件中,直接利用Excel表格或者将模型文件导出Dwg文件进行查看。
经实践检验,从模型输出的桩基坐标数据的精度达到±1 mm,满足施工放样的要求。至此测量工程师可以使用该表格中的数据进行测量放样,BIM端的工作完成。
3.2 智慧工地平台
通过建设“智慧工地”转变传统的施工现场管理工作方法,为项目的各参与方提供全新的信息交互方式,实现工地管理的信息化、智能化和可视化,从而彻底改变工地的管理模式[7]。最终实现下列目标:一是聚焦于施工现场一线的生产活动,实现信息化技术与生产过程的深度融合;二是保证数据实时获取和共享,提高现场基于数据的协同工作能力;三是强化数据分析与预测支持,辅助进行科学决策和智慧预测;四是充分应用并集成软硬件技术,满足施工现场变化多端的需求和环境,保证信息化系统的有效性和可行性[8]。
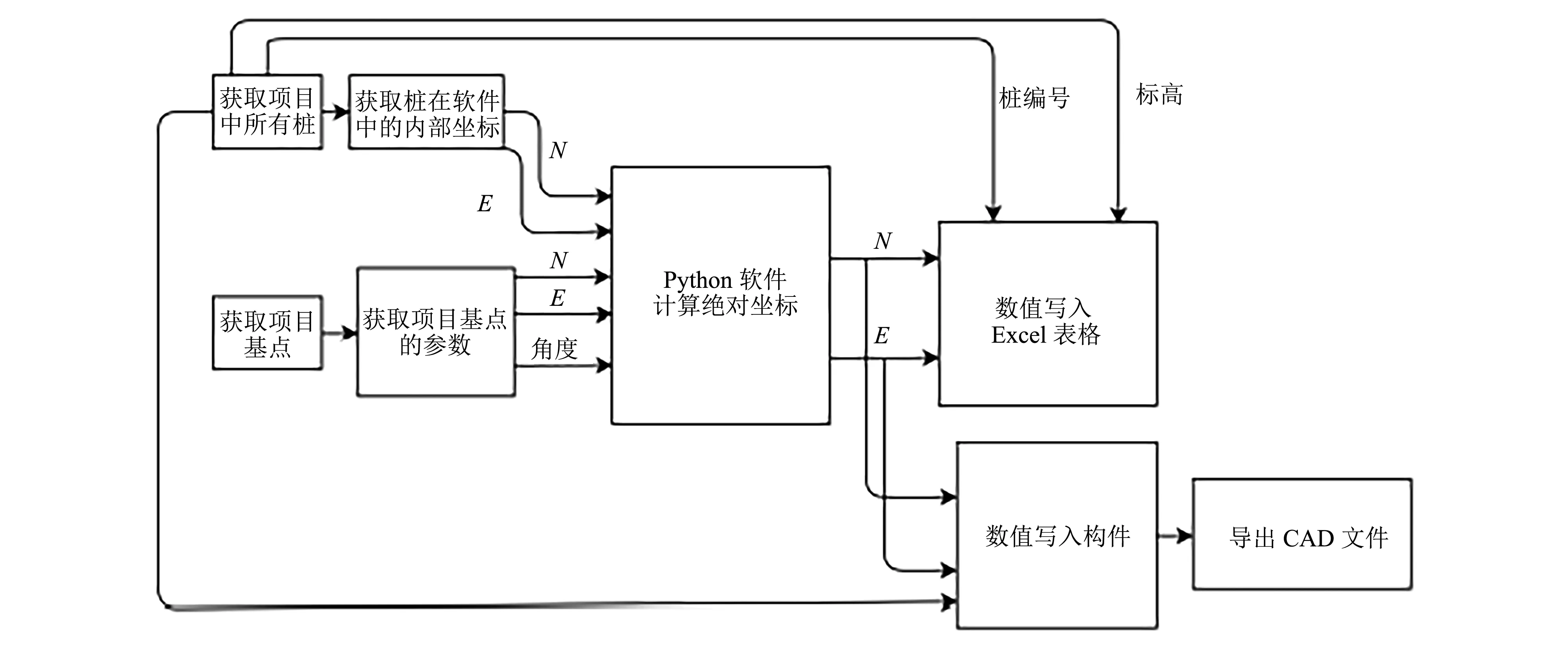
图7 Dynamo软件计算桩基真实坐标流程图
3.2.1 搭建智慧工地平台
智慧工地平台主要由感知层、网络层和应用层组成,三者分别为实现更透彻的感知、更全面的互联互通和更深入的智能化提供保障和支撑[9]。
本项目以广联达智慧工地平台中的构件跟踪为基础,将Revit软件模型导入到智慧工地平台的PC(客户)端,将BIM模型中的桩基编号与智慧工地中的跟踪编号相关联,如图8所示。同时指定现场管理人员跟踪该项工作任务。

图8 模型导入BIM5D客户端后的智慧工地平台
3.2.2 上报进度数据
施工现场管理人员可以通过手机App进行桩基任务跟踪,根据现场实际的施工进度搜索桩号并进行桩基施工进度的录入。
3.2.3 查看三维进度数据
在日常桩基施工生产中,可以在智慧工地平台上随时查看已经完成的桩基施工信息,只要输入桩号并填写桩基的开始、结束时间和主控项目等施工过程中的信息即可。在跟踪模型视图中可以快速查看某些区域的施工完成状态,如图9所示。在计划图标中可以查看具体完成的数量和该施工流水段总的桩基数量,如图10所示。

图9 深色区域代表已经完成的桩基施工

图10 施工流水中桩基的数量
3.2.4 输出进度管理报表
通过智慧工地平台的报表统计功能可以输出进度管理报表,将已经施工完成的桩基生成桩基台账,如图11所示。
图11 桩基台账
4 结语
新宫车辆段联合检修库共有桩基1 689根,Dynamo软件建模比手工建模的建模速度提升5倍、编号速度提升9倍、提取坐标速度提升85倍,极大地提升了工作效率和准确率。对于有经验的工程师而言,通过Dynamo软件进行程序编写和调试所需时间较短,能够根据项目的需求快速做出部署,在高周转的建筑施工背景下具有很大的意义。同时Dynamo程序在相同的工作范围内可以重复使用,做到一次编写重复利用。
在桩基施工阶段,使用BIM+智慧工地平台可实时掌握桩基施工进度。通过查看统计报表中的详细数据,可了解桩基施工过程中出现的各种问题,通过对问题进行分析总结并采取针对性解决方案,可有效提高桩基的施工质量。
