基于移相变压器的灵活合环控制装置及控制策略研究
2022-02-18杨用春唐健雄牛超群赵成勇
杨用春, 唐健雄, 牛超群, 赵成勇
(新能源电力系统国家重点实验室(华北电力大学) ,河北 保定 071003)
0 引 言
碳达峰、碳中和作为当今能源领域的重要研究课题,电力工业部门为实现这一战略目标,积极部署深化电力体制改革,构建以新能源为主体的新型电力系统,使其具有广泛互联、智能互动、灵活柔性和安全可控四个主要特征[1,2]。其中配电网的电能质量和供电可靠性是新型电力系统配电网的重要指标。现阶段我国配电网普遍实行闭环设计,开环运行,随着电力负荷密度增大,网络结构越趋复杂,双电源供电甚至多电源供电越来越多,通过合环操作实现不停电倒负荷成为一种必然趋势[3,4]。通过合环转供负荷可以减少停电时间、提高供电可靠性、保证系统供电质量以及提高公众对电力服务的满意度等特点[5],是实现配电网安全可靠的有效方式,然而对于电压幅值相位相差较大的配电网系统,往往是不能直接满足传统的直接合环条件的,而通过现场人为手段调节合环点两侧的电压较为复杂,对于运维人员的技术要求很高[6-8],且需要大量的人力和物力,有时还不一定能最终达到合环要求,因此需要迫切研究新的合环控制装置技术,以应对相对复杂的合环场景。对于合环控制技术部分研究我国仍较多停留在理论研究层面,且较少针对合环点电压幅相差较大的合环场景进行研究[9-11],合环转供控制装置还没有工程实际装置投运,因此对合环转供分析及控制装置的研究具有重要的理论和工程实用价值。
移相变压器(Phase Shifting Transformer ,PST)通过改变分接头的方式进行电压相位的调节,同时移相变压器技术相对成熟,运行维护相对容易,经济性显著[12,13],因此考虑将其应用合环控制调节。但是PST是通过传统机械式调压抽头进行电压调节从而达到移相的目的,所以调节速度存在一定的限制,虽然也有针对PST快速调节的方式,即采用晶闸管可控移相变压器(Thyristor Controlled Phase Shifting Transformer,TCPST)的方案进行电压相位调节,常规TCPST的基础理论也有一定的初步研究[14],但是对于兼具调幅移相功能的TCPST的研究还有待进一步完善,因此需要对于PST结构进行相应的改进,以适用于极端条件下合环控制应用场景。本文提出一种基于改进后的PST与电力电子技术相结合的灵活合环控制装置,同时具有灵活调幅移相功能的合环控制装置。由于提出的合环控制装置控制维度比较多,需要对其控制策略进行深入的分析,以适用于合环控制的应用。
本文首先对于提出的基于移相变压器的灵活合环控制装置的结构和工作原理进行分析,并对移相变的结构进行了改进设计,以适用于合环控制的应用场景,进而提出采用幅相自适应解耦调节控制策略,进行多维度调幅移相灵活控制,并讨论了其实现方法,最后在PSCAD/EMTDC环境下,对采用幅相自适应调节控制且具有调幅移相功能的TCPST进行合环转供仿真分析,验证了所提合环控制装置和控制策略的有效性。
1 基于PST的合环控制装置
1.1 基于PST的合环控制装置结构
基于PST的合环控制装置结构如图1所示。
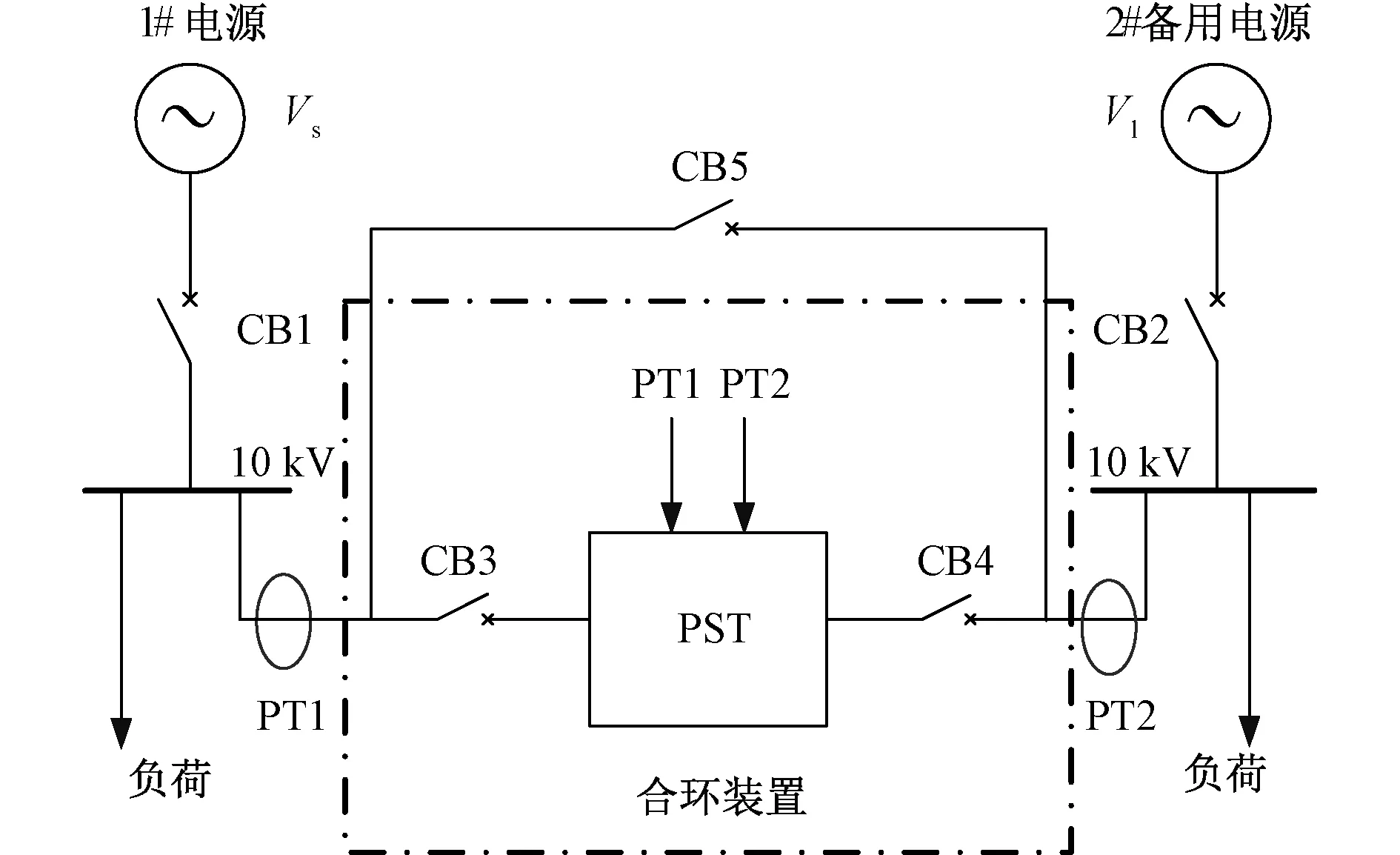
图1 基于PST的合环控制装置结构Fig. 1 Structure of closed loop control device based on PST
图1中有两条10kV电压等级母线即双电源配电系统;CB1~CB5为安装在设备间的合闸辅助开关,不同开关组合相互配合操作完成整个合环过程;PT1和PT2是电气参数检测装置,为合环控制装置提供必要的参数信息。合环控制原理是当某个母线、开关或馈线需要检修或者发生故障时,该母线、开关或馈线上的多电源供电的负荷就可以进行转移,通过合环控制装置进行合环操作,将负荷转移到与之相连的其他母线或馈线上,从而实现不停电倒负荷,即合环转供。
1.2 基于PST的合环控制装置工作流程
根据图1结构图分析工作原理可得,图中Vs和Vl是主电源及备用电源,正常状态下开关CB1和CB2闭合,开关CB3和CB4处于断开状态,两侧电源对应给两侧负荷供电,合环控制装置未投入运行,开关CB5处于断开状态。实现合环转供的操作流程如图2所示。
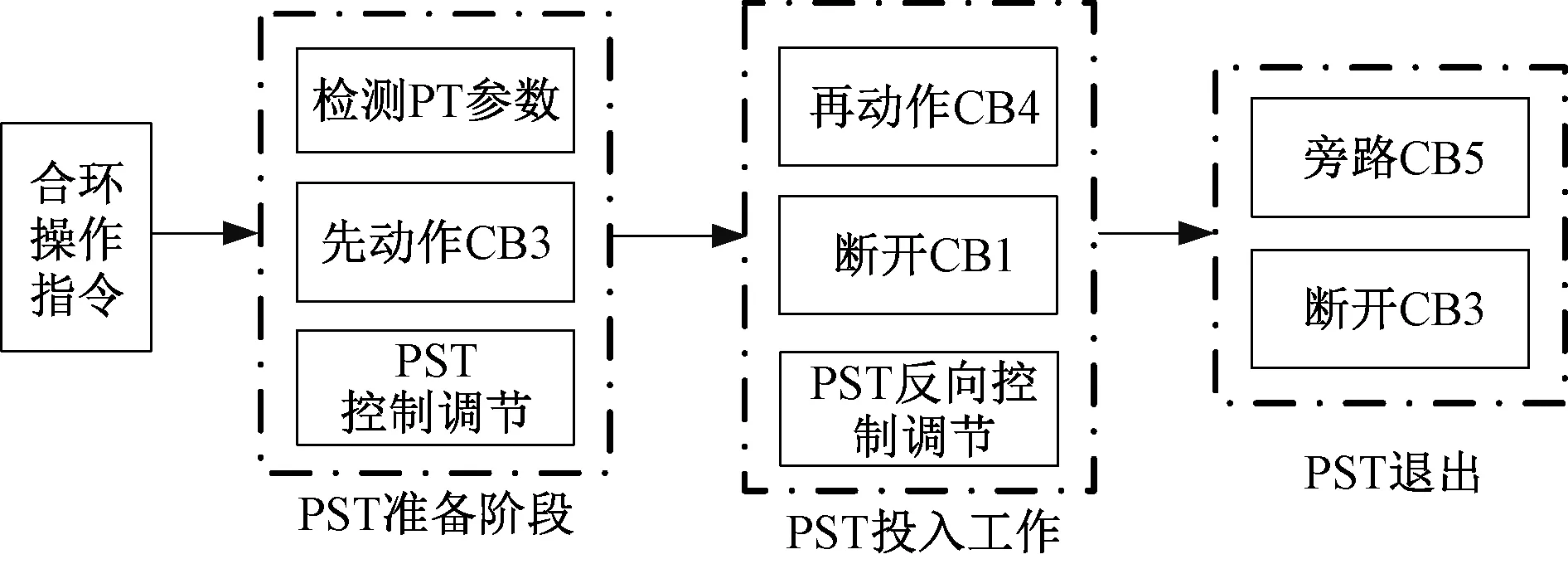
图2 合环操作流程图Fig. 2 Loop closing operation flow chart
根据图2的操作流程,合环过程中合环控制装置通过PST控制调节两侧母线相位差值,使得开关CB3或者CB4两侧相位相同,实现非常小的冲击甚至是无冲击合闸,投入合环控制装置后,使开关CB1断开从而实现负荷的不停电转供,而后可以长期将合环控制装置投入运行,也可以经过控制调节将CB5闭合,退出合环控制装置。
基于合环控制装置的结构和工作流程,进行合环转供需要高效可靠的合环控制装置。传统移相变压器作为合环控制装置针对工程实际中合环点开关两侧存在较大相位差可以发挥关键作用,但其采用传统机械式调压抽头对于合环转供应用场景存在调节速度慢、主要调相不能灵活调压等局限,因此为使PST作为合环控制装置更安全适用,需要对传统PST结构进一步改进。
2 幅相灵活调节合环控制装置结构和原理
2.1 用于合环灵活调节的PST改进结构
传统PST在1930年就已经提出来了,目前广泛应用在国外的高压输电网中,主要用于潮流调整,国内也做了较多的理论研究[15,16]。移相变压器的种类较多,目前应用最为广泛的是双芯对称可控移相变压器,其结构和相量关系如图3和图4所示。
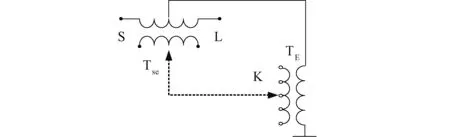
图3 PST结构Fig. 3 PST structure
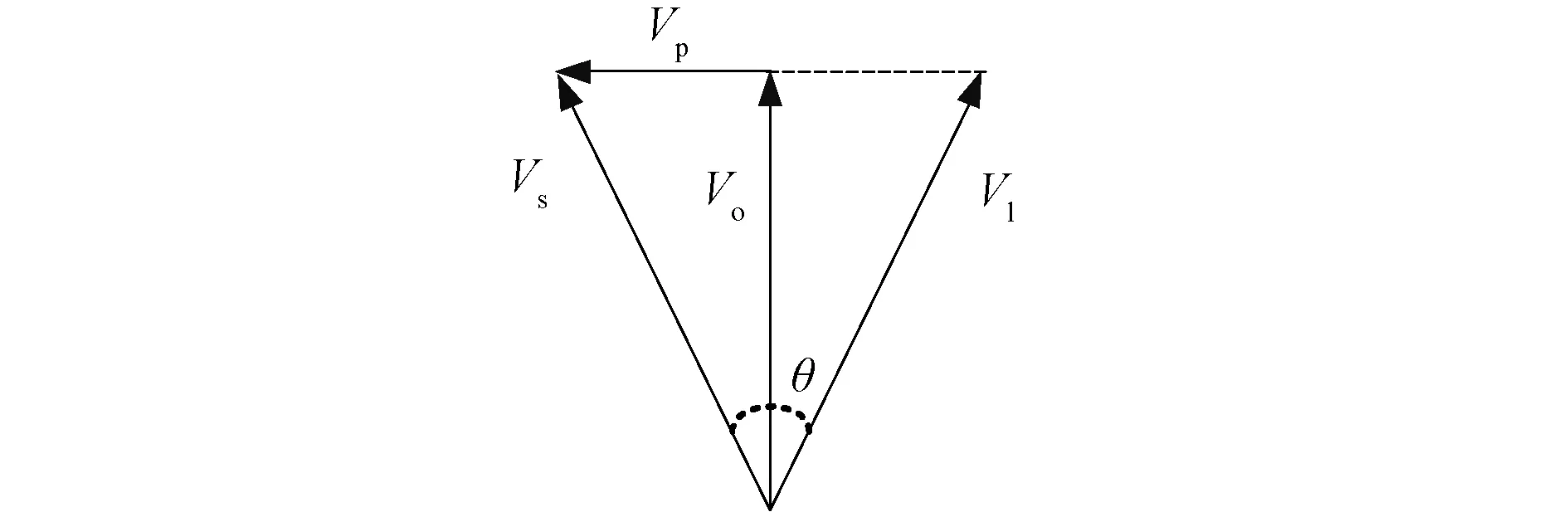
图4 PST调节矢量图Fig. 4 PST regulation vector diagram
该移相变压器由一台励磁变压器(TE)和一台串联变压器(Tse)组成。Tse二次绕组为三角形接法,一次侧绕组中间抽头与TE高压侧连接,用于为高压侧提供励磁,二次侧绕组分别引接至TE的二次侧绕组,在这种接线方式下,Tse以三角形连接的低压绕组电压变化量超前或滞后于TE的相应高压绕组电压90°,并与Tse相应的高压绕组联合产生电压Vp,使移相变压器的电源侧电压间产生一个相角的变化如图4所示,进而实现移相功能。
为了实现幅值和相位都能灵活调节,基于传统移相器结构和原理,本文给出PST改进结构如图5所示。
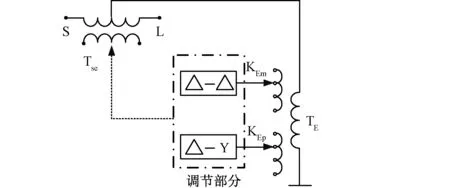
图5 PST改进结构Fig. 5 PST improved structure
由图5可知,PST改进结构是基于双芯变压器的结构并在励磁变压器二次侧增加了调节部分,该结构工作原理基于传统移相器相角调节抽头(KEp)并联增加了幅值调节抽头(KEm)。幅值调节部分接线方式异于相角调节部分,幅值调节部分是通过Dd接法将TE的二次侧绕组和Tse二次绕组连接,进而完成幅值控制调节。所以此改进结构既能起到调节相角也能起到调节幅值的作用,调节方式更加灵活,其电压调节矢量图如图6所示。图6中调节目标Vp是体现在合环转供的相角调节,而Vm是体现在合环转供的幅值调节。Vs表示S端母线的电压,Vl表示L端母线的电压,Vo为线路侧绕组中心感应电压。
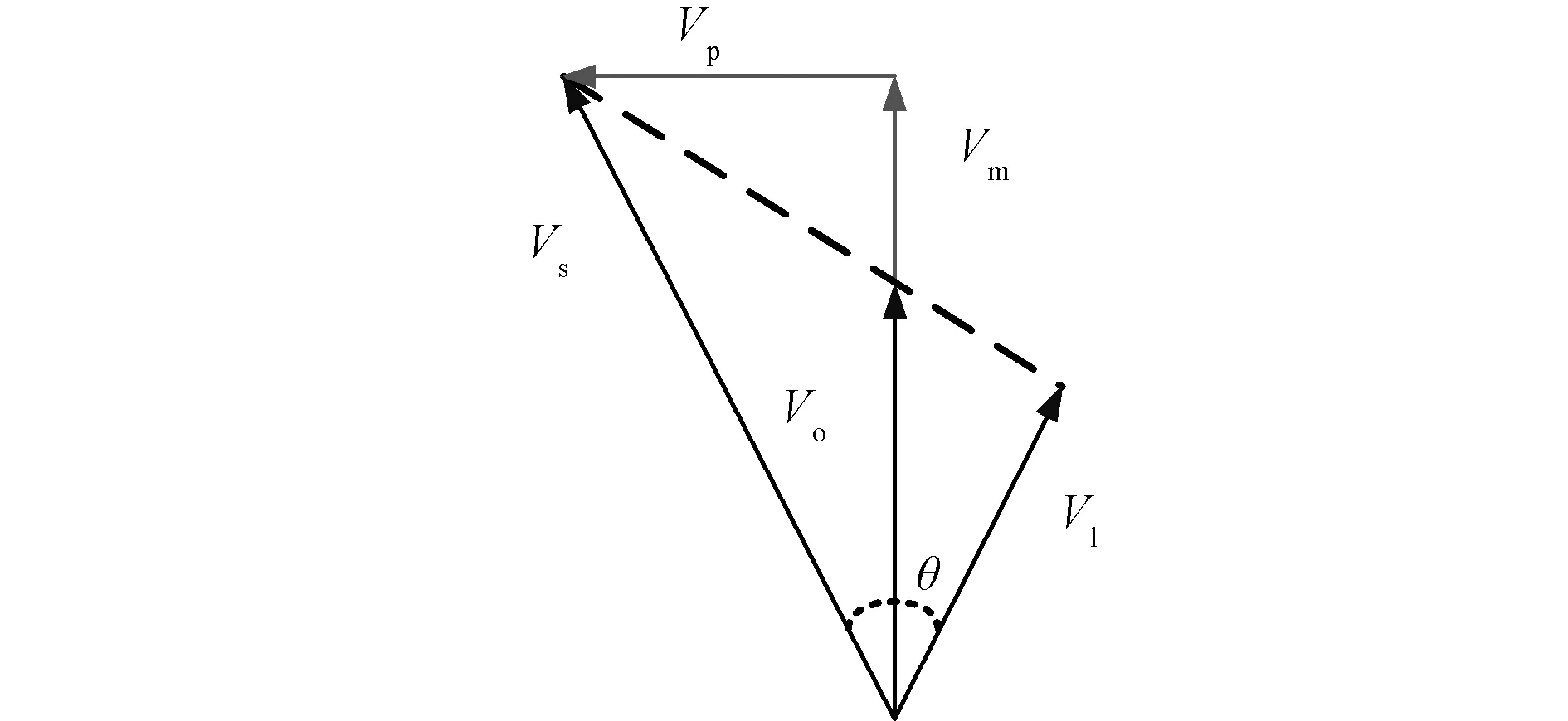
图6 改进PST调节矢量图Fig. 6 Improved PST adjustment vector diagram
图5所示改进结构虽然对于传统移相器的移相调节功能更加丰富,增加了调幅功能,但是对于操作调节抽头可能产生的电弧问题以及调节速度未得到改善,所以对于PST改进结构还需要进一步改进,以减少调节抽头调节产生电弧未及时熄灭所引发的故障的可能,并提高合环控制装置合环转供的调节速度。
2.2 基于TCPST的灵活合环控制装置结构
基于PST改进结构,实现具体功能关键在于调节TE的二次侧的调压抽头,所以进一步改进主要是针对于调节抽头结构进行改进,为达到操作过程响应时间快、操作过程安全,本文考虑加入现代电力电子设备参与调节操作,因此可以得到基于PST的灵活合环控制装置TCPST的结构如图7所示。
图7中结构连线图是基于PST改进结构中机械式电压调节抽头优化为电力电子设备控制的电压调节抽头,并根据图示连线方式连接到系统中。其中Tse为串联变压器,TE为并联变压器,Em和Ep分别为幅值调节绕组和相位调节绕组,Em和Ep相互之间解耦调节后,通过矢量叠加达到最后预期调节效果,调节矢量图如图6所示。
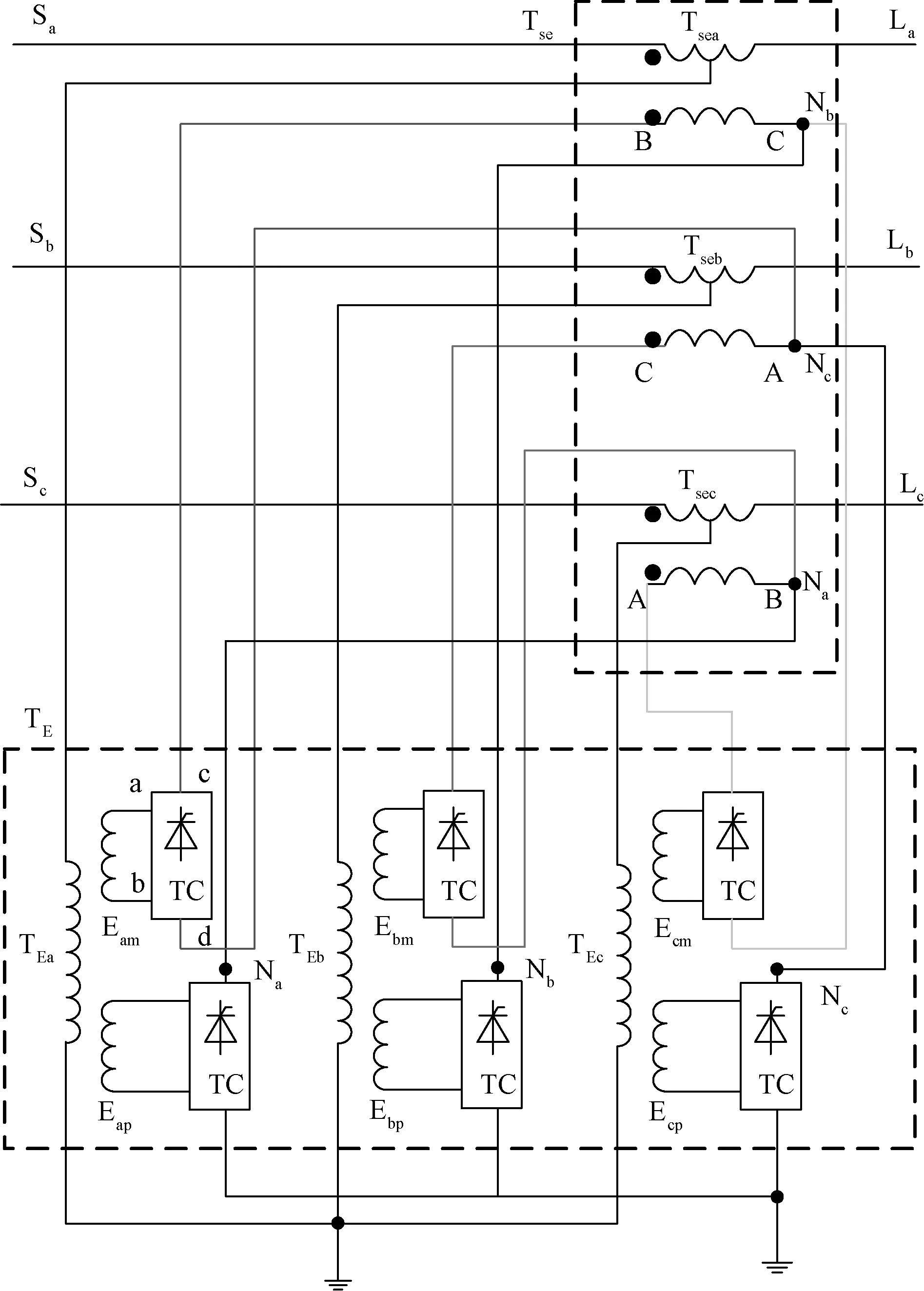
图7 基于PST的灵活合环控制装置结构Fig. 7 Flexible loop control device structure based on PST
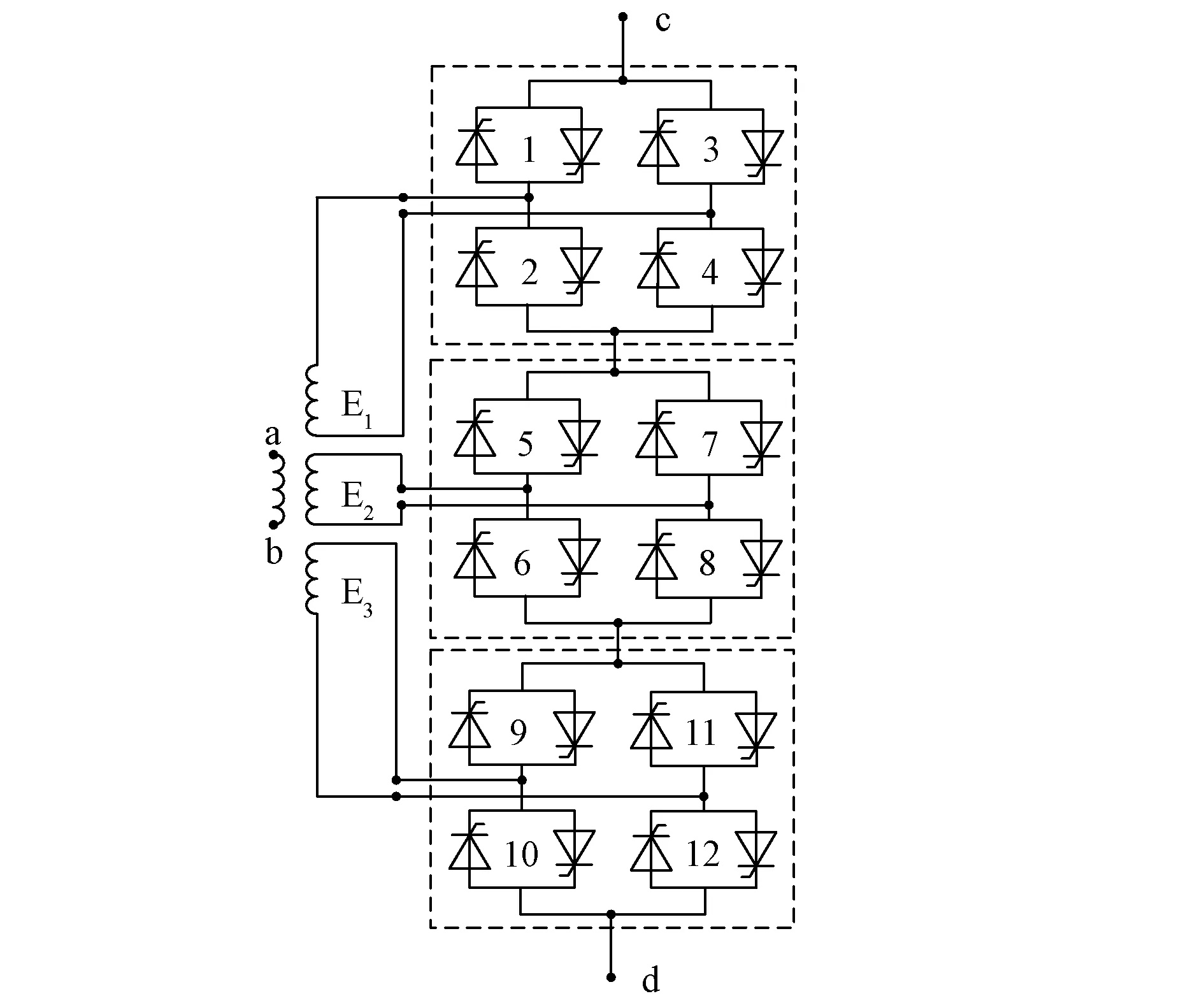
图8 晶闸管控制回路Fig. 8 Thyristor control loop
调节过程中起主要控制调节作用的是晶闸管控制回路(Thyristor Control,TC),对于TC回路实现控制调节作用的原理需要进一步分析。
2.3 基于TCPST的灵活合环控制装置控制回路工作原理
根据图7和TC回路具体结构如图8所示分析可知,节点a、b为并联变压器晶闸管控制回路TC输入侧绕组的两端节点,E1、E2、E3串联在一起构成TC感应二次侧,其二次侧感应出的电压经过晶闸管的控制后由节点c、d输出到串联变压器绕组,以实现合环转供操作。E1、E2、E3对应每个晶闸管控制单元都是由4组电子开关组成,每组电子开关均由反并联的晶闸管组成,通过控制12组电子开关的通断组合来调节二次侧的输出电压[17]。根据图7所示的接线方式,反并联的晶闸管开关组合不同,输出电压亦有所不同。以E1晶闸管控制单元为例,控制导通1和4电子开关组并关断2和3电子开关组,E1绕组感应的电压UE1会正向完全输出即UE1;当控制导通2和3电子开关组并关断1和4电子开关组时,E1绕组感应的电压UE1会反向完全输出即-UE1;当控制导通1和2电子开关组并关断3和4电子开关组时,或者控制导通3和4电子开关组并关断1和2电子开关组时,此时E1对应的一个晶闸管控制单元将其开路,所以E1绕组感应的电压UE1不会输出即输出0[18]。TE最终输出电压是将三个控制单元输出电压叠加输出,特别的是当TE输出0时三个绕组二次侧同时开路。
为了能够通过晶闸管控制单元输出的三个状态实现多挡位的连续调节,则需要将TC感应二次侧的变比结合电压基准UE作组合分析,经过一定的分析,当二次侧绕组E1:E2:E3=1∶3:9时,能够整体输出-13UE~13UE共27个电压挡位即可实现27级连续调节电压。
根据电力电子设备的特点,具有调幅调相功能的TCPST的结构相对于PST改进结构调节电压的范围更广,调节方式更加灵活。TCPST能根据不同的设计要求,设计不同的绕组E1:E2:E3的比值,最后通过相对应的控制策略实现预期的调节目标。虽然基于TCPST的幅相合环控制装置提高了电压调节的灵活性、快速性,但是由于提出的合环控制装置控制维度比较多,制定合理的控制策略是体现其优势的关键所在,基于此提出了一种幅相自适应解耦调节控制策略。
3 灵活合环调节控制策略
3.1 幅相自适应解耦调节控制
对于基于TCPST的幅相合环控制装置控制策略主要是对于并联变压器部分的电力电子开关进行触发控制。目前应用于可控移相变压器比较常见的控制策略有功率控制和移相角控制[19,20]。功率控制是以线路上的功率为控制目标,移相角控制是以移相角为控制目标进而调节电压。相对于功率控制,移相角控制需要考虑的影响因素更加的少,但是移相角控制对于触发角合理性有一定的要求,不合理给定触发角对于合环操作会有很大的冲击电流。基于分析功率控制和移相角控制,本文给出一种新的适用于合环应用的控制策略——幅相自适应解耦调节控制。其控制原理流程图如图9所示。
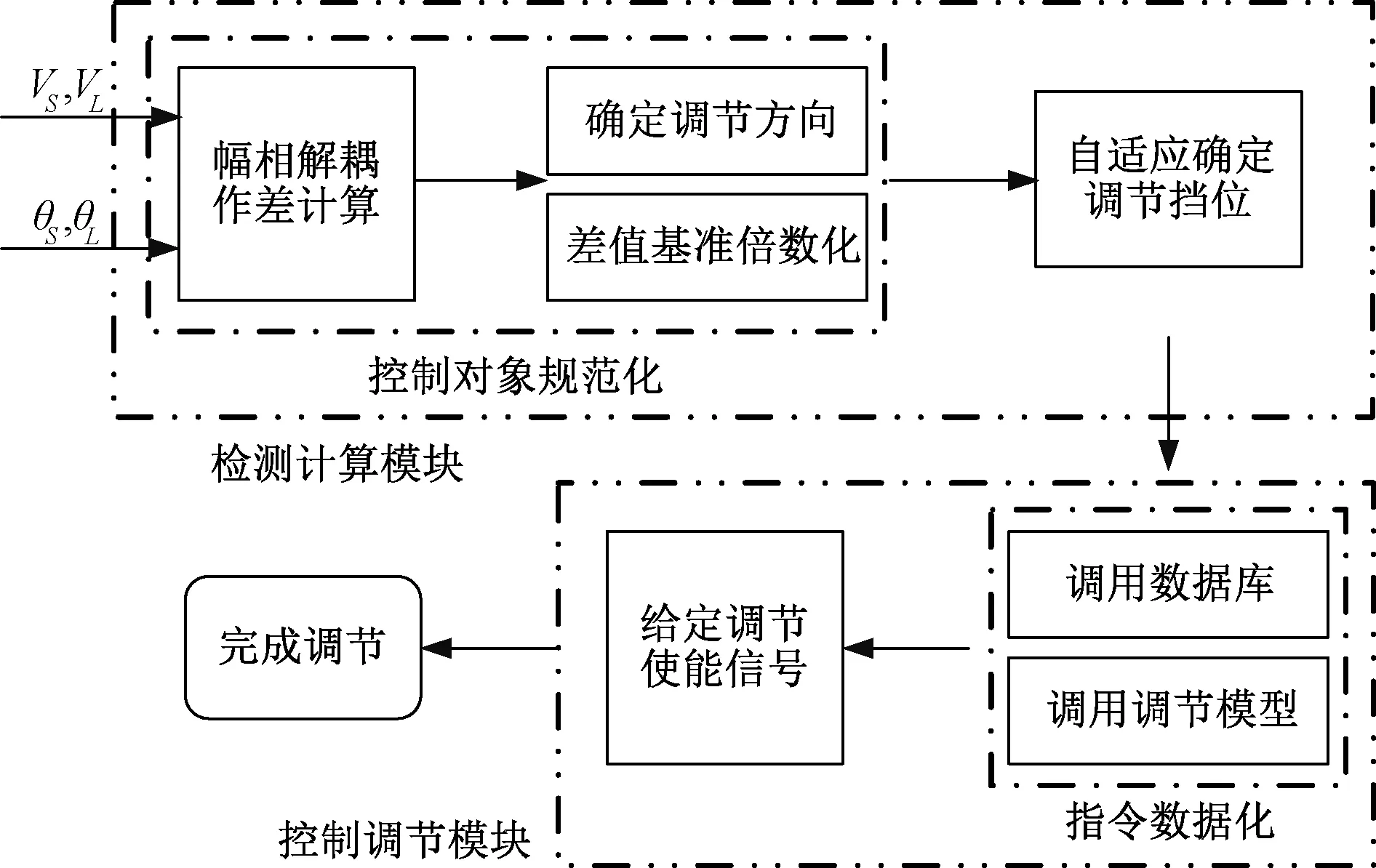
图9 幅相自适应解耦调节控制原理流程图Fig. 9 Flowchart of principle of amplitude and phase adaptive adjustment control
基于TCPST的灵活合环控制装置既能实现电压相角调节,还能实现电压幅值调节,所以幅相自适应解耦调节控制的控制对象是线路电压幅值和电压相角,由于通过改进的结构具有两个二次绕组,可以分别用于调幅和移相,从而为实现灵活的幅相解耦控制创造了条件。由图9可知,幅相自适应解耦调节控制策略主要涉及到两个模块,检测计算模块和控制使能模块。
3.2 检测计算模块
检测计算模块根据线路参数的输入,检测两母线间存在的电压差,从而进一步对输入参数进行幅相解耦作差计算即电压幅值相角计算,此环节是针对于调节对象所需要的调节量进行数值规范化处理,并判断是否超出调节范围,只有在合理调节范围内TCPST才能够安全工作。完成参数解耦计算并根据计算结果的正负性确定调节方向后,进行下一步电压参数差值基准倍数化,差值基准倍数化是对于TC感应二次侧变比所对应的参数基准值而言的,因为TC感应二次侧变比是确定的且只能按档对应调节,所以电压参数差值基准倍数化后就能确定电压相角和幅值需要调节的挡位。此环节关键在于基准值的给定,调幅基准值可直接根据所调节的挡位数和调节范围确定。
调相基准值可经过一定的计算确定调节的相角和调节挡位即变比的关系。当单独考虑调相作用时,基于图6所示调节原理图,调相变比基准值kp确定关系如下:
当考虑Vo≐Vs时
(1)
根据图7所示的连线关系图可得:
(2)
式中:n表示单向调节挡位。联立式(1)和式(2):
(3)
当不考虑Vo≐Vs时
(4)
联立式(1)和式(4)可得变比关系:
(5)
当确定一档调节具体相角值时,根据式(3)或式(5)确定调相变比设计基准值kp。
调幅基准值设计相对于调相要简单许多。当单独考虑调幅作用时,基于图6所示调节原理图,调幅变比基准值km确定关系如下
Vm=Vsnkm=|Vs-Vl|
(6)
由式(6)可得
(7)
根据预设基准值可先确定km和kp,然后自适应确定调节挡位即调节挡位依据调节对象自动生成相应的挡位级别,并将调节挡位信息传送给控制使能模块。
3.3 控制使能模块
控制使能模块由两个部分组成:指令数据化和使能控制调节。指令数据化是调用使能数据表信号和调用调节模型。
由于TCPST由晶闸管控制单元和TC二次绕组按照一定规则组合配合调节,所以其中的晶闸管控制单元就要一定的控制策略对其进行开断组合。常规晶闸管的使能是对于特定的触发角和特定的时刻给予脉冲,即移相角控制方式的使能方法,此方法相关文献已有研究。本文对于晶闸管的使能采取的策略是幅相自适应解耦调节控制方式,这种方式需要提前建立一个数据表,其中的信息是提前给定与TC二次侧绕组变比配合所需要晶闸管组合的通断数据,这些数据是根据检测计算模块给出的调节挡位指令所需要调用的,该数据表如表1所示。
表1各数据对应的是正向基准值UE=1001(1表示反并联晶闸管导通,0表示反并联晶闸管关断,排列顺序对应图7晶闸管标号顺序)和反向基准值-UE=0110,以及晶闸管组合短路数据1100排列组合而成。由于晶闸管组合排列形式不唯一,实现27挡位调节的数据形式亦不唯一。
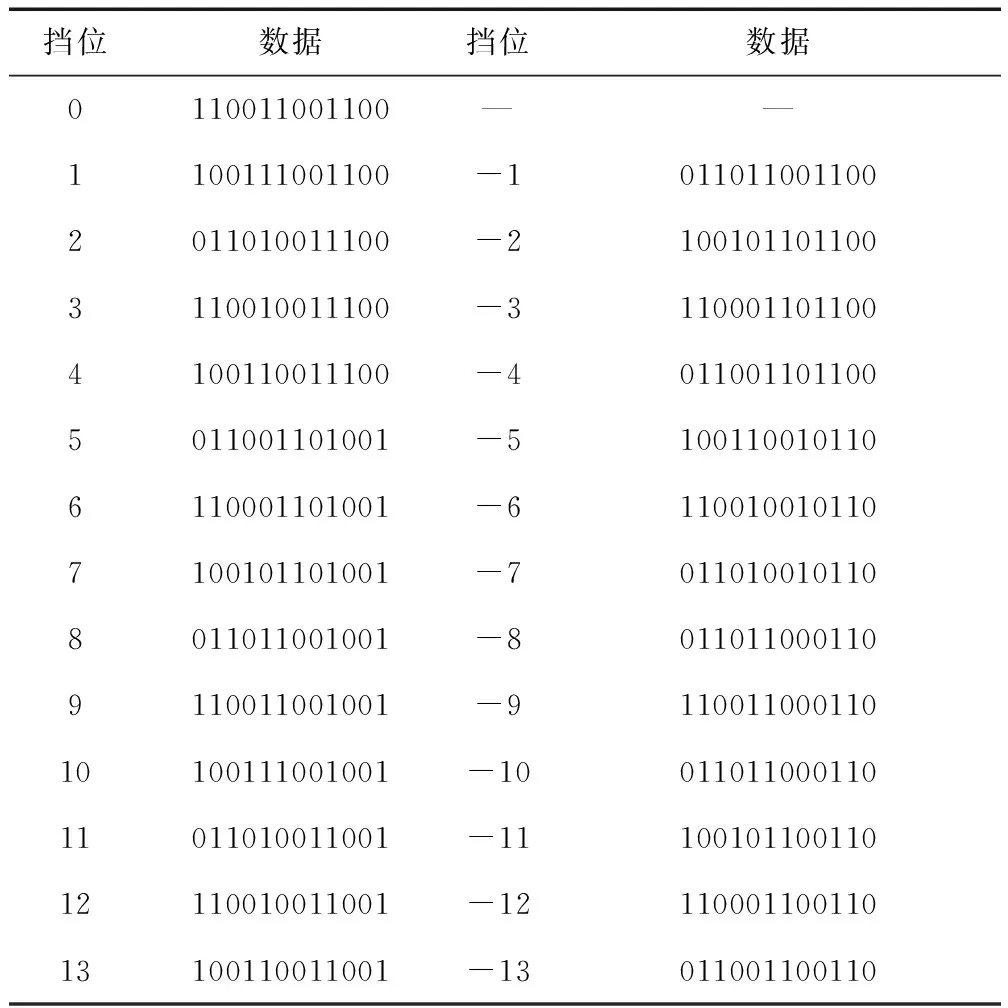
表1 使能数据表Tab.1 Enable database
根据调节挡位指令所调用数据表信息,结合调用调节模型给定调节所需要的使能脉冲指令,进而给晶闸管组合产生对应的导通脉冲,完成控制调节,最后为合环操作做好准备。
4 仿真结果分析
基于10kV电压等级配网双电源系统合环转供应用场景,在PSCAD/EMTDC仿真平台搭建仿真模型,该仿真模型投入的合环设备是具有调幅调相功能并采用电压控制的TCPST。
4.1 工况1仿真结果
根据图1和图7的结构图建立仿真模型,参照表2中预设设定对应参数和对应时间仿真操作。
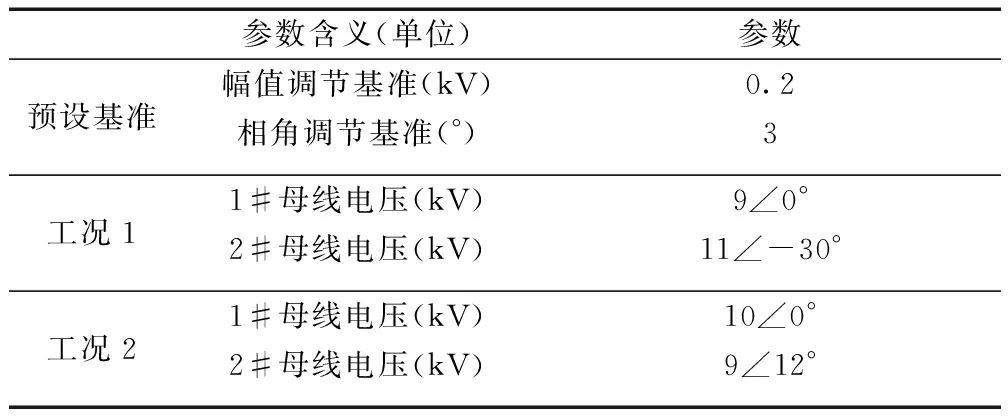
表2 仿真参数设计Tab.2 Simulation parameter design
整个仿真时间设定为4.2 s,初始状态下开关CB1和CB2闭合,开关CB3和CB4处于断开状态,合环控制装置未投入运行,开关CB5处于断开状态。整个仿真操作开关过程如图10所示。
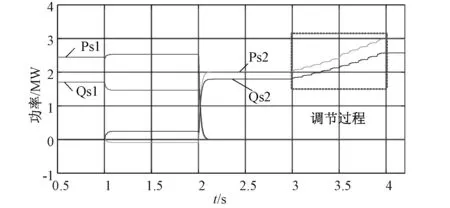
图10 功率变化图Fig. 10 Power change graph
Ps1和Qs1为1#电源的有功和无功,Ps2和Qs2为2#电源的有功和无功,1 s前初始状态1#母线电压为9∠0° kV,2#母线电压为11∠-30° kV。在0.5 s时开关CB3闭合,使合环装置带电,1 s时合环开关CB4合,使TCPST处于待工作状态,此时已感应出具体电压差。2 s时开关CB1分,完成使1#母线和1#负荷断联,3 s时TCPST开始进行电压幅相自适应调节,由于TCPST中的绕组有一定的内阻,所以两侧母线只能尽可能调节到最小电压差值,电压调节完成并稳定一段时间后,再将开关CB5闭合,开关CB3和CB4断开,退出TCPST完成合环转供。1#母线电压变化情况如图11所示。
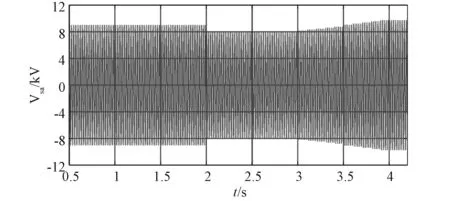
图11 1#母线电压变化情况Fig. 11 Voltage change of No. 1 busbar
由图11分析可得,2 s时操作1#电源与1#母线的负荷断联,此时由于合环控制装置存在一定内阻会有一个电压差,之后由于2#母线电压高于1#母线电压,所以3 s后电压调节过程中2#母线功率呈逐渐上升变化,此过程为TCPST参与调节过程。调节过程两侧母线电压变化情况如图12所示。
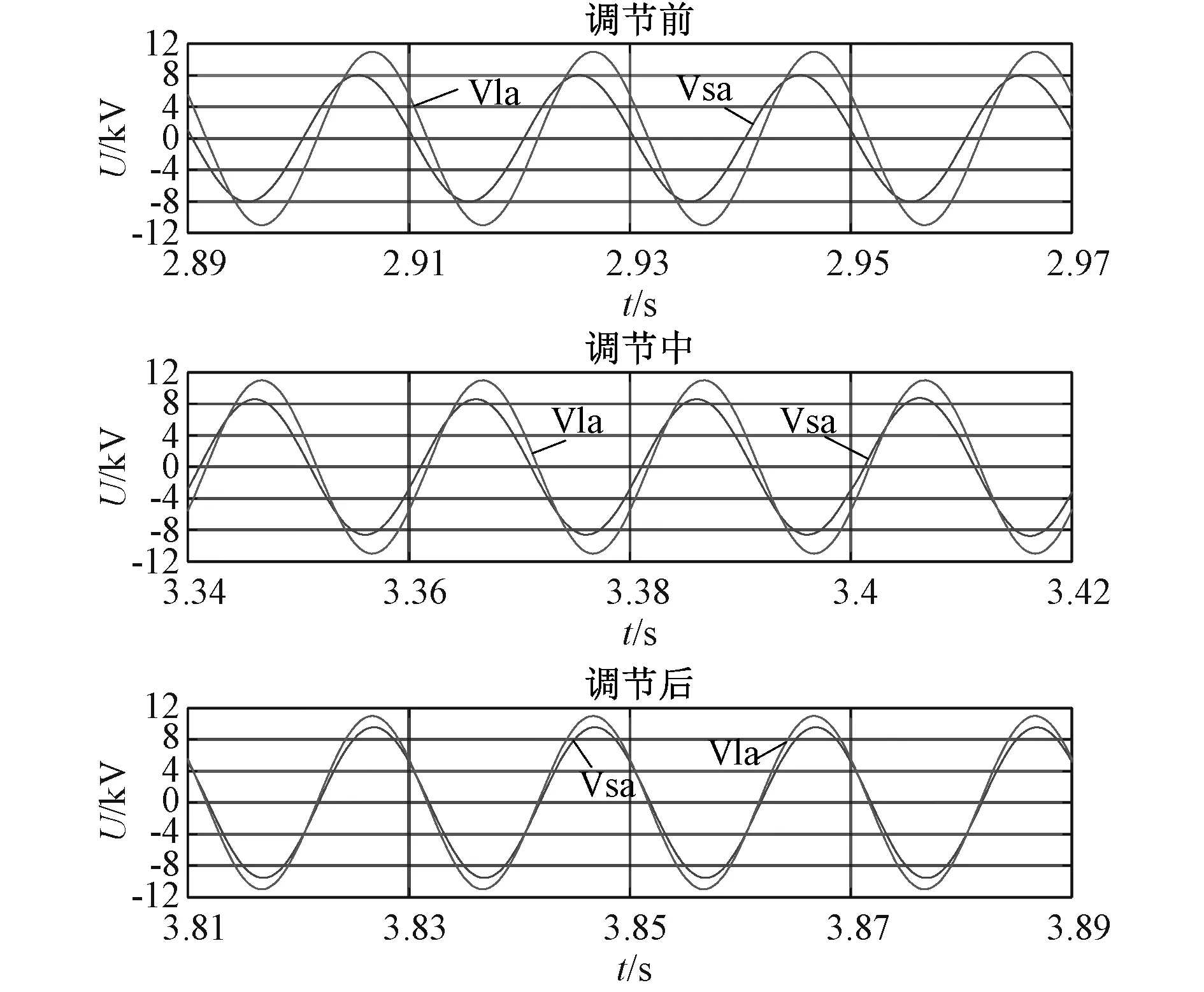
图12 两侧母线电压变化情况Fig. 12 Variation of bus voltage on both sides
工况1条件下,设定调节幅相基准分别为0.2 kV和3°,两侧母线电压幅值差和相位差均需要调节10档,每档调节时间设定为0.1 s。由图11可知1#母线电压在第3 s时开始逐渐变化,一直到第4 s时稳定与2#母线电压相近的电压值,正好调节10挡。由图12可知两侧母线电压变化具体情况,最后相位调至一致幅值由于TCPST内阻会有一定压降,符合预期。而对于3 s后合环控制装置TCPST电压调节具体过程可分为TE调节过程和Tse调节过程,图13为TE的A相调节过程。
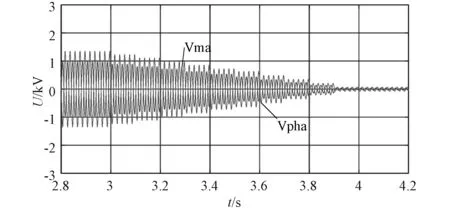
图13 TE的A相调节过程Fig. 13 A Phase regulation process of TE
图13中曲线易得到并联变压器通过TC电压控制实现了自适应按档调节,Vma和Vpa分别表示TE的A相电压幅值变化曲线和相角变化曲线。Vm和Vp矢量和是TE调节输出到Tse二次侧的输入值Vo1,进而在线路绕组中感应出系统合环调节需要的电压Vo2,可以得到Tse的A相调节过程如图14所示。
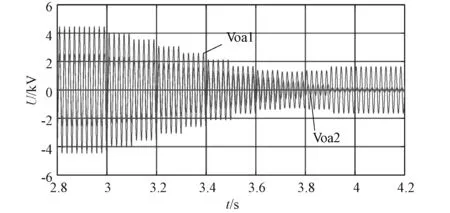
图14 Tse的A相调节过程Fig. 14 A Phase regulation process of Tse
图14表示了通过幅相自适应解耦调节控制的TCPST电压调节达到调节预期,但是TCPST会有一定内阻压降,图示Vo2曲线在4 s时开始稳定在一个不为0的电压值,但此压降非常小,对于进行合环操作是符合安全规范的。
合环转供操作调节电压是采取的调节手段,分析合环电流情况能够进一步验证调节效果。所以根据图15可以进一步分析TCPST工作时合环电流。
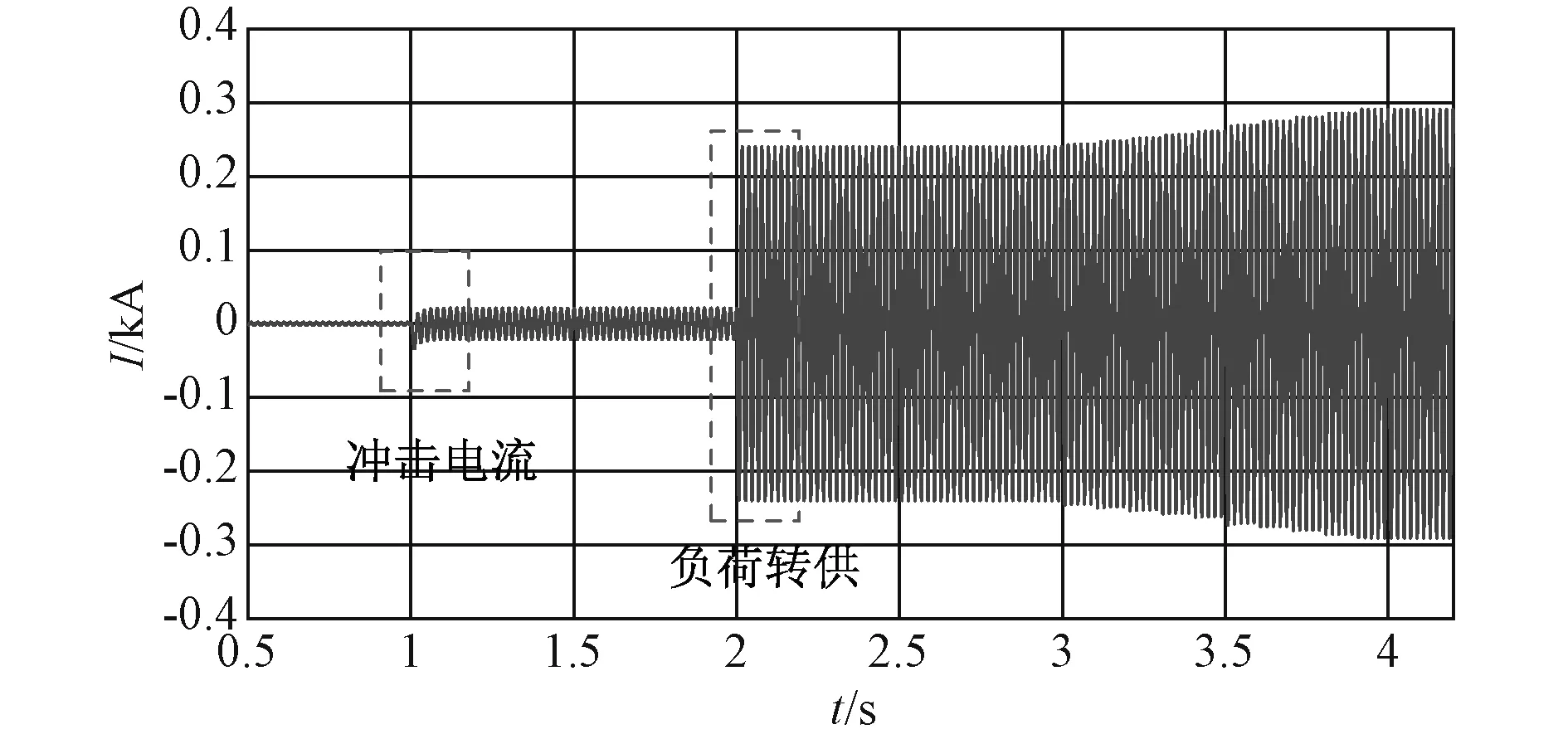
图15 合环电流变化图Fig. 15 Loop current change graph
1 s开关CB4合时产生了大小为25 A的冲击电流,相对于正常工作电流220 A可认为实现了无冲击合闸。2 s开关CB1分时有一个阶跃变化后保持稳定,3 s时TCPST开始自适应控制调节,此时合环电流同功率般呈上升变化并在4 s稳定下来。根据配电网合环电流分析实验[21],图15所示合环电流变化属于安全范围,说明整个合环转供过程实现了无冲击合环,达到合环转供预期效果。
图16是采用直接合环产生的冲击电流情况,0.5 s时开关CB3合使系统处于待合环状态,1 s时CB4合即进行直接合环操作。2 s时开关CB1分即负荷转供。
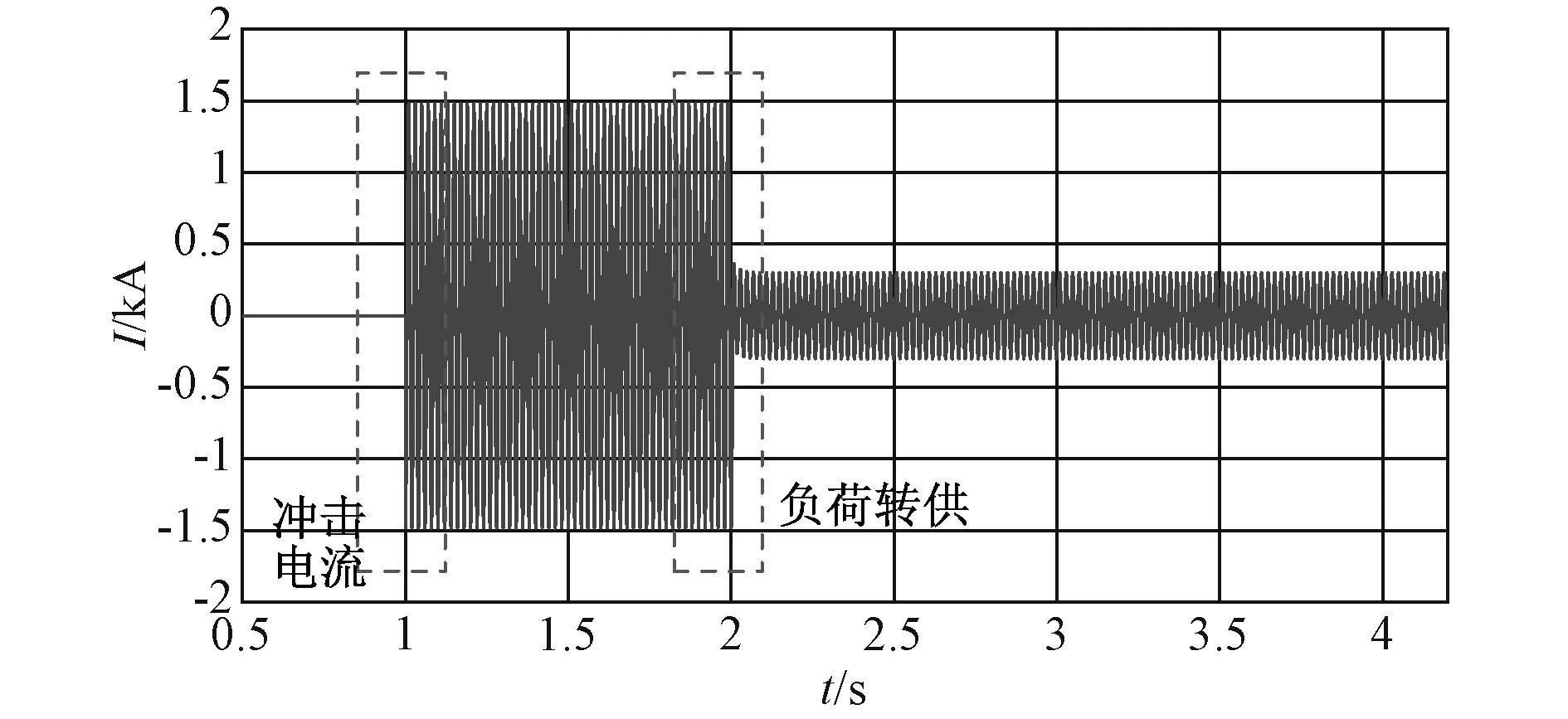
图16 工况1直接合环冲击电流Fig. 16 Case 1 direct closing loop inrush current
对比分析图15和图16可以明显看出相同工况下,采用合环装置的合环操作所产生的合环冲击电流明显小于传统直接合环所产生的合环冲击电流,且效果明显。但是由于合环装置的内阻压降的存在导致合环转供后的电流会有一定的升高。
4.2 工况2仿真结果
基于工况1搭建的仿真模型,将模型中参数按照表2中工况2的参数设计。可以得到调节功率变化图和合环电流变化图分别如图17和图18所示。
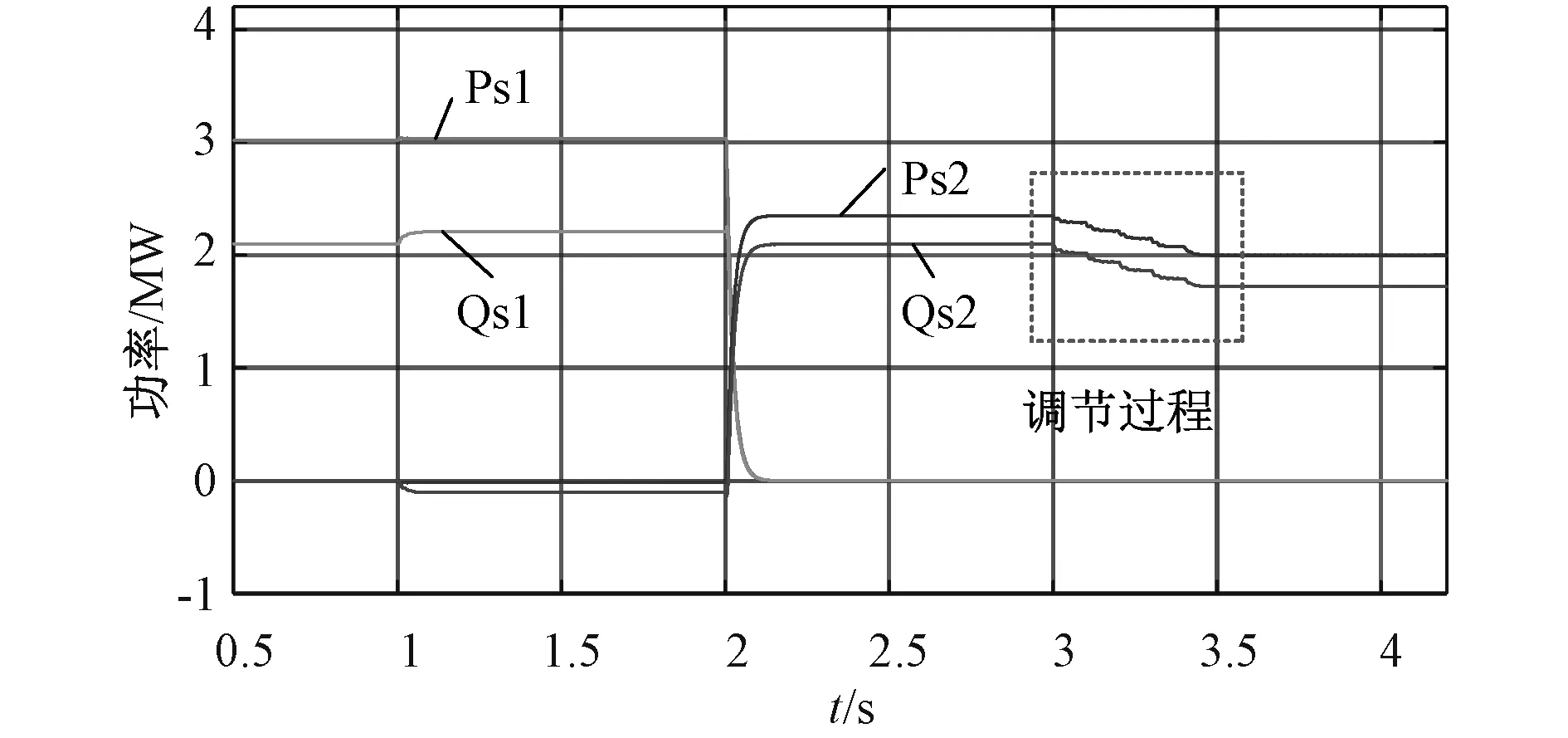
图17 工况2功率变化图Fig. 17 Case 2 power change graph
工况2的2#母线电压设定是9∠12°kV,基于设定的基准值,自适应挡位调节需要进行5档调节,调节过程需要0.5 s。
图18 工况2合环电流变化图Fig. 18 Case 2 closed loop current change graph
由图17可知TCPST成功进行了自适应控制调节,由于2#母线电压幅值小于1#母线电压,所以功率呈下降变化。除此之外图18所示合环电流变化情况也是满足合环转供的相关要求。
结合工况1和工况2的仿真结果可知,采用幅相自适应解耦调节控制的TCPST可以实现幅相正反灵活调压,相比于PST调节功能更加丰富,调节速度更快。
5 结 论
本文针对10 kV配电网通过合环不停电转供负荷的应用场景,提出了一种基于TCPST的能够兼具调幅和移相功能的灵活合环控制装置,设计了电压幅相自适应解耦的调节控制策略,并在PSCAD/EMTDC环境下仿真分析了所提基于TCPST的合环控制装置及控制策略对于10 kV配电网合环转供负荷的调节效果,得到如下结论:
(1)通过在PST的并联侧增加调幅绕组的方法实现幅相正反灵活调节,并进而采用电力电子开关的方法进行快速化改进,使采用的移相变压器适合合环转供的应用场景。
(2)针对三相系统的幅值相位多维度及组合电子电力开关的多控制量,设计了解耦检测计算组合电子开关的自适应使能触发的幅相电压调节控制策略,从而实现灵活的合环控制调节。
(3)所提基于移相变压器结构的合环控制装置和调节功能相比于传统PST更加丰富,调节的速度和灵活性也有较大的提升,并且相对电力电子变换器调节电压具有突出的经济性以及可维护性优势。
(4)基于TCPST的合环控制装置由于晶闸管工作在开关状态下,因此在稳态情况下有着良好的电能质量,不存在稳态谐波,但是对于晶闸管开关过程中产生的谐波,是否对晶闸管及变压器造成一定的影响,还有待进一步分析,论文后续将开展相关的研究。
