基于SSD和红外视频的光伏板故障识别算法研究
2022-02-17张文慧,张中正,解富国,于雷,刘广臣,马亚杰
张文慧,张中正,解富国,于雷,刘广臣,马亚杰

摘要:由于光伏板长期暴露在露天的环境下,经常出现异物遮挡和光伏板损坏。针对这两类问题,提出了一种基于目标检测算法和远红外视频的光伏板故障识别系统。首先,根据无人机拍摄的光伏板远红外视频提取出两类故障的图像;其次,根据两类故障在红外图像中的特征不同,对图片分两类打标签,标记故障信息;再使用主流的SSD算法对标记图片进行训练。最后,训练好的模型可以标记出两类故障信息。经过不断地训练调整,此模型对故障识别的准确率达90%,可以对实际的光伏检修工作提供帮助。
关键词:异物遮挡;热斑;图片特征;目标检测算法;远红外视频
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2022)35-0090-03
1 概述
随着社会的快速发展,人们对新能源的需求也越来越迫切。不少地方开始大规模使用太阳能光伏板发电。然而太阳能光伏板的大面积使用也带来了许多检修上的问题:光伏板长期暴露在各种天气环境下,因此光伏板经常出现树叶、塑料袋、鸟粪和泥土等异物的遮挡问题,以及光伏板自身故障导致的热斑问题。
传统的检修方式是通过监测光伏发电系统的输出功率、输出电压和手持红外线检测仪判断运行故障,效率低下。郭宝柱[1]在Otsu法和最大散度阈值法的基础上,提出自适应最大散度阈值差法来进行红外图像识别。TSANAKAS J A等人[2]基于边缘检测方式,使用Canny边缘检测算子作为诊断模块进行光伏板故障识别。车曦[3]先对光伏电池片的各种运行状态进行状态分类编码,然后通过可扩展脉冲神经网络方法实现了对光伏热斑的识别。赖菲等人[4]也已经利用深度学习算法的CNN对光伏板图像进行自动识别判断,确定故障的类型。现有的研究技术对光伏板只进行热斑的识别,因此在实际应用中会对其余故障还要进一步识别,消耗时间长。因此光伏产业需要寻求更高效、综合的故障识别系统。
本文采用深度学习中常用的目标检测算法—SSD算法[5]对光伏板的异物和内部热斑故障进行识别。通过SSD算法对无人机[6]采集的远红外图像等数据进行综合分析,可以快速、准确地进行故障监测及定位,帮助工人及时进行维修和清扫,大幅度提高光伏电站的发电量,降低维修事故及成本。
2 SSD算法原理介绍
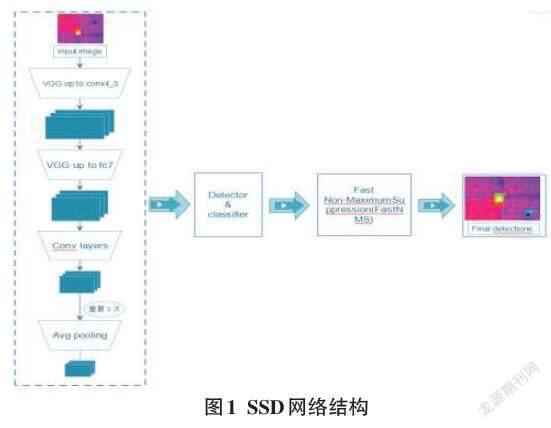
SSD算法是基于one-stage目标检测算法(One-Shot Object Detectors)实现的。这种方法的原理是利用单次检测就可以达到识别效果,得到目标物体的位置信息以及目标物体的类别概率。SSD最底层的网络是VGG-16,在输入图片后,其会对不同的特征图大小进行相应的比例映射,特征图的比例映射会保存至映射候选框中。比如Conv4和Conv7映射的候选框偏小,可以用来检测小物体;Conv8和Conv9映射的候选框尺寸中等,可以用来检测中等大小的物体,而Conv10和Conv11映射到原图的候选框偏大,则可以用来检测大物体。实现检测不同尺度物体的目的。根据特征图在输入图片上映射候选框、特征图大小进行不同比例的映射,用多个卷积层后的特征映射图来定位和检测原始图像的物体,其具体网络结构如图1所示。
3 研究思路
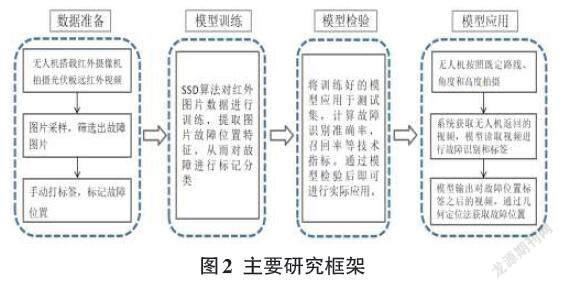
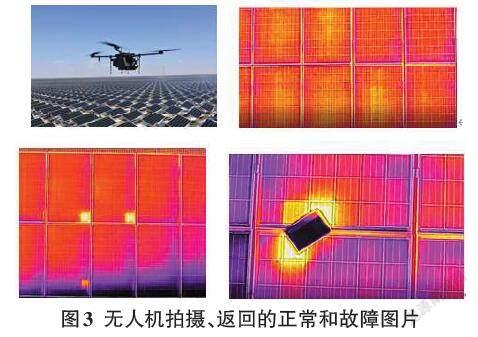
光伏板的热斑故障和异物覆盖情况是最多的。在红外图像中,这两类光伏板问题表现出明显的差别。对于光伏板自身故障问题,其在远红外视频中表现出局部正方形的、黄色高亮部分,俗称“热斑”。对于光伏板异物的遮挡问题,表现为形状不规则的、颜色较暗的、边缘为黑色的且异物周围常常与高亮部分相接的特征。基于深度学习中常用的SSD目标检测算法,其在复杂环境中对交通路牌、蓝色车牌[7]中的应用效果不错,因此本文考虑采用基于SSD目标检测算法对无人机远红外视频中的异物和热斑进行识别。
本文主要的研究框架如图2所示:
4 数据准备
远红外录像数据拍摄于某光伏发电厂,无人机按照既定路线、飞翔高度和飞翔角度进行巡航、录像。电脑保存无人机返回的光伏板的远红外视频。
对无人机返回的红外录像进行采样、筛选。在图片采样处理中,图片采样频率设置为红外视频每12帧间隔采样图片数据。在图片筛选时,对一些由于光伏板反光、图片模糊以及光伏板占比小于80%的圖片数据给予删除。其次,本文所使用的SSD方法只需要对目标位置进行标注,因此应着重关注于带有故障和异物的光伏板图片,对正常位置的光伏板图片不予标注和处理。为保证筛选过程的准确性和科学性,本文在专家和维修工人的指导下对含有异物和热斑的故障图片进行了筛选。最后选取了1150张红外图片进行训练,其中图像包含热斑的1030张,包含异物的620张。
5 基于SSD算法的光伏板故障识别
5.1 模型训练
本文使用Labellmg软件对故障图片进行标签化处理。对这1000张图片进行手动打标签,文件保存成.xml的格式。标注时,故障标记成两类,一类是热斑,另一类是异物。图像标注时利用热斑和异物的最小外接矩形进行标注,保证每个故障在1个最小的外接矩形框里。对于在一张红外图片中两种故障类型都出现的情况,两种故障同时分类标注。对标注之后的光伏板图片的.xml文件,以7:3的比例随机抽取打标签图片划分训练集和测试集。
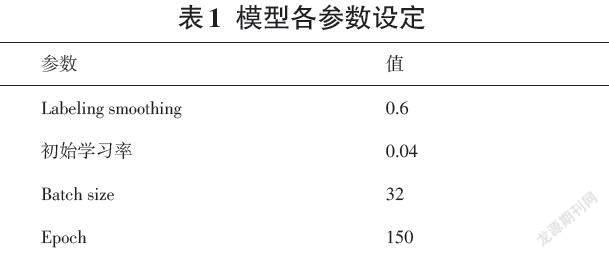
通过对SSD算法的参数进行调节,得到对于结果训练最好的参数。在计算损失函数值时,为了抑制损失值过拟合现象,引入了Label Smoothing 正则化策略,这种策略能够减少真实样本在计算损失值中的权重,从而达到抑制过拟合的目的。
1)Label Smoothing对真实概率的分布作出的改变如下:
[Pi=1,if(i=y)0,if(i≠y)→Pi=(1-ε),if(i=y)εK-1,if(i≠y)] (1)
2)Label Smoothing对交叉熵损失函数作出的改变如下:
[Loss=-i=1Kpilogqi→Lossi=(1-ε)×Loss,if(i=y)ε×Loss,if(i≠y)] (2)
3)Label Smoothing对最优的预测概率分布作出的改變如下:
[Zi=+∞,if(i=y)0,if(i≠y)→Zi=log(k-1)(1-ε)ε+α,if(i=y)α,if(i≠y)]
(3)
[α]可以是任意实数,最终通过抑制正负样本输出差值,使网络能有更好的泛化能力。
模型技术指标分析结果如表1所示。
5.2 实验结果分析
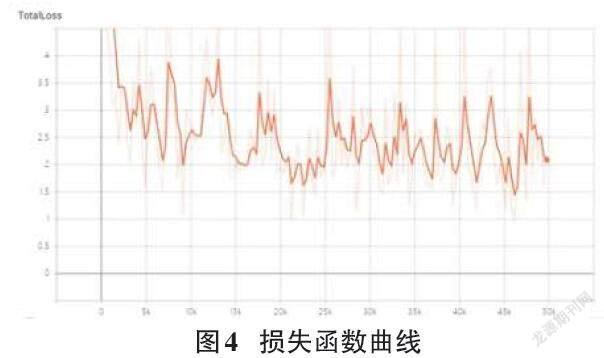
通过对total_loss的观察,会发现图像逐渐收敛并趋于稳定值,如图4所示。
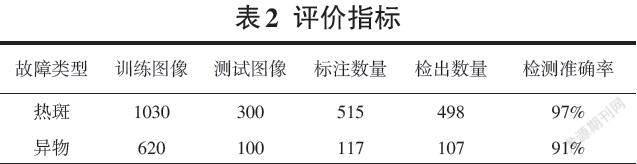
并且对于测试集的测试,笔者给出了一个准确的识别结果,如表2所示:
分析检验结果,SSD算法识别光伏板故障类型的结果是不错的,可以进行实际的应用。
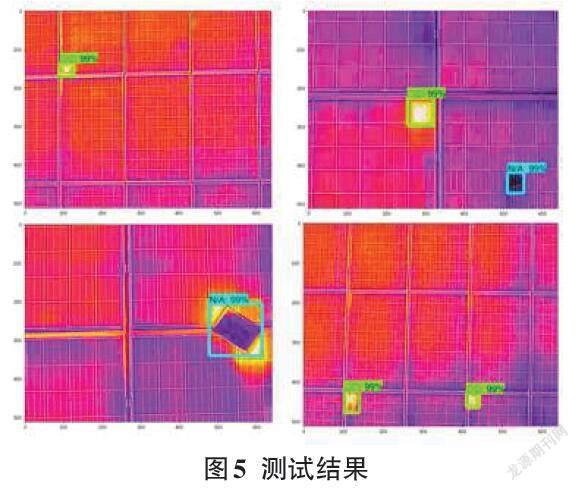
将训练好的模型应用到光伏板的故障识别算法中,其识别异物和热斑的结果可以很清晰地从图片上标注出来。最终识别结果如图5所示,在可视化图片结果中,绿色框标注的是光伏板热斑类故障,蓝绿色标注的是光伏板上的异物情况。
6 结束语
本文借助无人机拍摄的光伏板远红外视频,利用深度学习中SSD算法对光伏板的异物和热板故障进行了识别。该方法识别的准确率达90%以上且对两类故障的识别具有一定的鲁棒性。本文所使用的整套系统可以应用于实际大型光伏电厂中,有效地帮助维修工人对光伏板的故障排查和异物清理工作,提高工作效率,给光伏电厂减少不必要的损失。
但是本文的研究仍然存在着许多需要改进的地方。
1)不同地区的光伏发电厂对太阳能光伏板的安装角度有所不同,拍摄角度过低会使光伏板红外图像的有效面积过低,降低工作效率。拍摄角度过高又会造成热斑和小的遮挡物不显著,造成模型误判[8]。
2)更优的识别算法能够对热斑图像进行更加深入的图像形态特征进行研究,包括遮挡物的形状,遮挡面积等,由此可以对光伏板的异物遮挡种类进行更加细化的分类。
参考文献:
[1] 郭宝柱.光伏阵列热斑的红外图像处理的研究[D].天津:天津理工大学,2016.
[2] Tsanakas J A,Chrysostomou D,Botsaris P N,et al.Fault diagnosis of photovoltaic modules through image processing and Canny edge detection on field thermographic measurements[J].International Journal of Sustainable Energy,2015,34(6):351-372.
[3] 车曦.基于红外图像识别的光伏组件热斑故障检测方法研究[D].重庆:重庆大学,2015.
[4] 赖菲,陈亚鹏,单正涛,等.深度学习算法在光伏电站无人机智能运维中应用[J].热力发电,2019,48(9):139-144.
[5] Liu W,Anguelov D,Erhan D,et al.SSD:single shot MultiBox detector[M]//Computer Vision - ECCV 2016.Cham:Springer International Publishing,2016:21-37.
[6] 王栓虎,温向炜.无人机在光伏组件巡视检查中的应用分析[J].太阳能,2021(1):51-54.
[7] 祁忠琪,涂凯,吴书楷,等.基于深度学习的含堆叠字符的车牌识别算法[J].计算机应用研究,2021,38(5):1550-1554,1558.
[8] 洪声艺.无人机载可见红外光伏板热斑检测系统研究[D].北京:中国科学院大学(中国科学院上海技术物理研究所),2020.
【通联编辑:唐一东】