煤矿智能化系统在复杂地质条件下的应用探讨
2022-02-17李彦辉张有为胡玉龙
李彦辉,张有为,胡玉龙
(辽宁能源煤电产业股份有限公司,辽宁 沈阳 110122)
0 引言
我国目前正处于转型、现代化和结构调整的关键时期,在网络新技术与传统产业深度融合的新形势下,各产业正引领着产业的重大变革。其中将智能技术纳入传统设备、工业改造和现代化已成为解决能源供应、能源安全和工业安全等国家问题的关键手段[1-2]。煤炭的开采需要面对极为复杂的作业环境,传统的煤炭开采方式面临着巨大的潜在风险[3-4],对于安全生产产生不利的影响,对生产效益的提高形成了制约,智能技术与装备的应用,尤其是在复杂地质条件下的应用和实践对我国煤炭开采产业的发展具有重要意义[5-8]。
根据国家发展改革委、国家能源局、应急部、国家煤矿安监局、工业和信息化部、财政部、科技部、教育部关于印发《关于加快煤矿智能化发展指导意见》的通知(发改能源〔2020〕283号),为全面加快智能化工作面建设步伐,推动高产、高效煤炭开采,急需发展以实现无人化开采为目标的智能技术与装备。为此,对智能化采煤技术在辽宁能源煤电产业股份有限公司西马煤矿的应用进行探讨。
1 工程背景
1.1 矿井概况
辽宁能源煤电产业股份有限公司西马煤矿位于辽宁省灯塔市西马峰镇南,属红阳煤田南部的独立井田,行政区划属灯塔市西马峰镇管辖。井田处于下辽河平原东侧,地处辽东山区与下辽河平原的接壤部位,海拔标高为15.6~21.4 m,形成东北部高,西南部低的平缓地势。西马煤矿北距沈阳市56 km,灯塔市13 km,南距辽阳市10 km,东距长大铁路张台子车站8 km。长大铁路位于井田的东侧,沈海高速公路和202国道从井田中部穿过,交通便利。井田北起后葛针泡,南止太子河北岸防洪堤,长7.5 km,东自东马峰村,西至前葛针泡、乌大哈堡,宽4 km,面积24.162 km2。采矿权标高为-170~-700 m 。生产规模为160万t/a,西马煤矿现采矿许可证范围由12个拐点圈定。
1.2 工作面地质构造概况
1309工作面原地质储量10.8万t,核实后地质储量15.8万t,可采储量15.3万t,储量增加5.0万t,储量增加的原因为实际上煤厚度增加及下煤计量。煤层生产能力1.58 t/m3,工作面回采率97%。
西马煤矿1309工作面范围由北二区1309运顺、回顺、切眼、设计停采线所圈定,工作面长550.7 m,宽175.5 m,面积96 648 m2。工作面南起北二区回风下山,北至北二区北翼13号煤层回风巷,工作面东邻北二区1308采空区,西临北二区西翼皮带上山。工作面上部除空区间留有6 m间隔煤柱外12号煤层均已采动,工作面西部13号煤层未采动。工作面地表为前葛村水田,地表平均标高+19.3 m。12号煤层与13号煤层层间距为23~25 m,一般24 m。煤层埋深377~456 m。工作面整体为倾伏向斜构造,向斜轴位于工作面中部,轴向223°~247°,向西南倾伏,倾伏角3°~11°。向斜轴北翼煤层产状127°~143°∠8°~19°;向斜轴南翼煤层产状287°~296°∠6°~8°。范围内煤、岩层层理、节理、裂隙、断层、宽缓褶皱发育。根据北二区1309运顺、回顺、切眼、亮面切眼及上部12号煤层回采实见,工作面范围内落差大于2/3采高的断层有6条,其中F4断层处于工作面以外,对回采无影响。F6断层处于工作面中部,对回采有较大影响。F1、F8断层处于采面边缘,对回采有一定影响。构造发育附近,煤岩层产状有突变现象。
2 智能化开采系统组成
智能化开采是不断发展和进步的过程,主要指通过环境的智能感知、设备的智能控制,在不需要人工直接干预下,由设备独立完成回采过程[9-12]。为实现1309工作面智能化开采及智慧矿山建设,提出了“远程一键式启停、自动开采、远程人工干预,无人值守”为目标的方案,以达到减人、提效开采模式,融合采煤机自动截割、液压支架及端头支架的自动移架、运输系统智能运行、远程视频监控、工作面远程集控的目的。
2.1 顺槽控制中心与地面调度室
顺槽控制中心是复杂地质条件下开采智能工作面的核心组成。工作面所有数据通过数据传输平台,接入到顺槽控制中心。顺槽控制中心采用高效工控平台,具备数据显示、设备控制、数据分析和生产管理的功能。工控平台通过数据信息进行分析,对图像进行识别,采用预警报警机制生成运行规划,依据所确定刮板运输机的实时位置曲线,制定采煤机路径规划,以及液压支架自适应规划来实现智能化。顺槽控制中心定期生成设备运行状态的分析报告,采用关键指标的方式来反映生产进度、分析故障原因、指导日常维修,将更换式维护转变成预防式服务。工作面数据信息经矿井环网上传到地面调度室,实现对综采设备、环境状态和人员状态监测。地面调度室和顺槽控制中心采用工控平台进行远程控制、智能控制和数据分析等工作。
2.2 液压支架及超前支架电液控制系统
电液控制系统在复杂地质条件下智能工作面中协调控制液压支架,同时承担着工作面数据传输平台的功能。电液控制系统采用现最先进的以太网现场总线控制方式,常规的电液控系统使用CAN总线的控制方式,通过传感器来确定液压支架的状态,如油缸行程、油缸压力以及支架高度,通过控制液压主阀来执行单架动作或成组动作。在智能工作面中,电液控制系统在工控平台的控制之下可以在局部工作面范围内对液压支架等做进一步调整和修正,实现自适应控制。电液控制系统包含上位机、控制器、传感器、液压主阀和供电系统。系统布置情况主要由液压主阀、传感器和控制器相连。控制器之间通过电缆连接组成电液控制系统。电液控制系统经交换机接入到工控平台,LED灯、视频摄像头直接与控制器相连。
2.3 采煤机控制与精确定位系统
采煤机控制系统是复杂地质条件下智能工作面系统的另一重要组成部分,其中包含采煤机就地控制和工控平台控制。工控平台控制由采煤机路径规划、防碰撞、安全防护、环境联动等功能组成。采煤机数据传输可以通过采煤机自身的数据线进行传输,同时也可以通过工作面数据传输平台进行传输。采煤机上位机、工控平台和数据交换机安装在顺槽控制室内。采煤机上位机通过交换机和工控平台相连,与此同时采煤机的数据也通过工作面数据传输平台接入到工控平台,实现数据双向通信。
目前采用的采煤机记忆割煤方式无法适应工作面变换,只适用于顶底板没有变化的理想情况下的采煤。在实际生产中,工控平台需要生成采煤机下6刀的路径规划,保证工作面的正确平稳推进。在液压支架控制器上输入工作面高度修正值,或在顺槽控制室上位机上输入工作面高度修正值,即可得到工作面对应的采割曲线。在综采工作面内,因为无法确定地理基准点,所以工作面自动推进时,无法保证工作面平直,这是制约智能化工作面的一个重要因素。如图1所示,采用陀螺仪、行程传感器和图像识别技术,工控平台可以计算出刮板运输机的位置曲线。依据已确定的运输机位置曲线,可以推导出采煤机位置。基于液压支架、采煤机和刮板运输机的实时位置,工控平台可以生成采煤机6次循环的路径规划。采煤机、刮板运输机和液压支架系统执行此路径规划,实现工作面平直控制和智能推进。

图1 惯性导航系统工作面布置Fig.1 Layout of inertial navigation system
2.4 三机、顺槽皮带机、泵站控制系统
刮板运输机的平直是采煤工作面中实现“三直两平”的关键。如图2所示,通过采用采煤机精确定位系统技术、行程传感器、图像识别技术、工控平台生成刮板运输机的位置曲线。基于刮板运输机位置,通过工作面液压支架进行调整,实现刮板运输机平直,工作面液压支架平直。通过分析安装在工作面端头的视频摄像头图像,工控平台对大块煤进行识别,对转载机进行保护。泵站控制作为智能工作面的组成部分,包含就地控制、逻辑控制和智能控制功能。

图2 三机/顺槽运输机控制布置Fig.2 Control layout of main machines / conveyor
2.5 工作面视频系统
工作面视频系统是由安装在工作面内的云台摄像头组成的视频系统通过数据传输平台将视频图像传输到工控平台。工控平台通过图像识别和图像比对来确认工作面内护帮板、刮板运输机、支架底座前端的位置,煤壁顶板的状态。基于分析结果,对采煤机、液压支架进行调整,保证工作面平直,提高对煤壁和顶板的支撑精度,防止煤机和支架间干涉。视频系统如同操作人员眼睛的延伸,此外还可以通过视频摄像调整可能出现漏架的情况。按照工作面设计要求安装摄像头,通常每4架安装一台云台摄像头,一般安装在支架顶梁处,如图3所示。对于大采高工作面,可以通过设计摄像头的安装方式来满足对顶底板观察的要求。视频摄像头由控制器供电和控制。安装在工作面端头的摄像头(超前支架、转载、破碎、顺槽皮带、泵站)经过节点交换机将视频图像传输到工控平台。
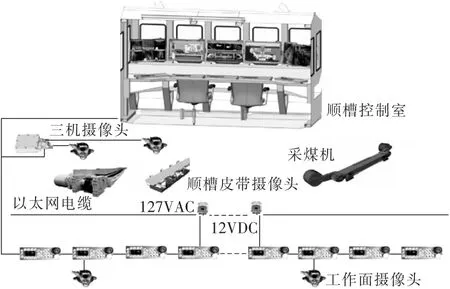
图3 工作面摄像头连接Fig.3 Connection of working face camera
3 智能化开采安全监控系统
3.1 工作面矿压、地质信息监测系统
工作面矿压监测系统作为复杂地质条件智能化开采安全监控系统的组成部分。工控平台对来自工作面立柱压力数据、巷道超前支架立柱压力数据以及顺槽顶板位移传感器的数据进行分析,生成工作面矿压分布曲线以及液压支架支护规划。如图4所示,系统由工作面支架压力传感器、超前支架压力传感器和巷道顶板位移传感器组成。通过地质雷达(Ground Penetrating Radar,简称GPR)的无线电波或其它技术检测回采走向上的介质分布和对不可见目标体或地下界面进行扫描,以确定井下工作面煤层地质条件,建立真实、精确、动态的工作面煤层地质模型。

图4 工作面矿压分析连接Fig.4 Connection of ground pressure analysis in working face
3.2 工作面人员定位功能
工作面人员定位功能通过工作面施工人员携带RFID射频发射器和工作面电液控制系统控制器进行双向通信。RFID数据经过数据传输平台进入到工控上位机,工控平台依据人员位置、权限以及设备运行状态等制定相应保护措施。如图5所示,系统由工作面人员无线定位卡、以太网控制器、工控平台组成。
3.3 工作面环境监测系统
工作面环境检测系统包括安装在工作面上环境监测仪器,通过数据传输平台进入到工控平台,矿井环境检测数据可以通过交换机进入到工控平台,工控平台接收文本格式数据。如图6所示,系统由环境检测传感器(粉尘传感器、瓦斯传感器、二氧化碳传感器)和工控平台组成。

图6 环境监测系统布置Fig.6 Layout of environmental monitoring system
3.4 在线故障诊断系统
工作面在线故障诊断系统由安装在采煤工作面设备上的振动传感器、温度传感器和油脂传感器等监测传感器组成。通过数据传输进入到顺槽控制中心,通过上位机上监测诊断系统软件进行数学建模,利用振动参数、温度参数、供电参数、流量参数等故障诊断算法(故障频率计算、故障特征提取、故障部位与严重程度智能判断),对设备运行状况进一步分析诊断,实现机电设备运行状态实时诊断。系统能够对设备故障在线智能定量诊断,实现故障准确定位与维修指导。设备运行状态集中监测实现大型机电设备运行状态信息全面实时监测。故障预警预报功能,实现大型机电设备异常状态声光报警。设备使用过程对寿命运行周期进行跟踪,保证设备长期使用寿命。
4 应用预期成果
对西马煤矿1309工作面已经完成设备井下单机调试及联合试运转监测设备运行状况、工作面视频跟机自动切换、监测工作面运行状态等工作。智能化设备监测结果表明在复杂地质条件下工作面智能化系统能够较好地满足生产和安全要求。后期将分步对辽宁能源煤电产业股份有限公司西马煤矿从回采工艺、技术装备等方面入手,查找智能化割煤的影响因素,并提出解决方案。本着政策先行,技术装备逐步跟进的原则,将影响智能化割煤的问题逐一解决,使现有的有人监护智能化割煤成为常态,到年底基本实现工作面智能化割煤产量达到月度计划煤量的80%。根据技术装备水平和人员素质情况,逐步精简智能化工作面岗位设置及人员数量,达到智能化开采。
5 结语
煤矿智能化在复杂地质条件下系统应用主要包括电液控系统、三机控制通信系统、智能刮板控制系统等。以煤矿智能化开采及智慧矿山建设为框架,构建“远程一键式启停、自动开采为主、远程人工干预为辅,特别是在复杂地质条件下,在满足井下人员安全与生产高效的前提下,最终实现“无人值守”为目标的减人、提效开采模式,融合采煤机自动截割、液压支架及端头支架的自动移架、运输系统智能运行、远程视频监控、工作面远程集控等关键技术。实现在复杂地质工作条件下整个采煤工作面的“有人巡视、无人操作、远程干预、安全高效、绿色节能”的智慧运营。
