混合动力电动汽车的跟车控制与能量管理
2022-02-17赵秀春
赵秀春 郭 戈 4
近年来,能源与环保问题越来越受到全球专家学者的关注,汽车保有量的不断增加导致能源消耗与环境污染日益加剧,同时也使得城市拥堵现象越来越严重[1].混合动力电动汽车(Hybrid electric vehicles,HEVs)具备传统汽车和纯电动汽车两者的优点,既能够缓解纯电动汽车电池续航里程的问题,又能够有效降低燃油汽车的能耗与污染问题,是目前解决能源危机与环境污染的有效途径之一.混合动力电动汽车的能量管理策略直接影响着车辆性能和燃油经济性,而车辆驾驶工况是车辆动力性和燃油经济性的重要影响因素,对能量管理起着至关重要的作用.在实际驾驶环境中,车辆的工况循环和速度变化往往是未知的,给混合动力电动汽车的控制与能量管理带来了挑战.
目前,混合动力电动汽车的能量管理控制策略的研究主要分为基于规则和基于优化的控制算法两大分支[2].基于规则的控制策略主要是根据车辆的不同转矩、车速、电池电量SOC或发动机效率map图进行工作模式划分,制定规则进行切换控制[3−4].该控制策略算法简单且规则容易实现,但无法适应不同工况和实时动态变化的需求,因而往往通过结合其他智能控制算法(如模糊控制、神经网络)以获得更好的鲁棒性和适应性.但在实际驾驶条件下,仍无法保证最佳的控制性能[5−7].因此,更多的研究开始关注并探索基于优化的能量管理控制策略.基于既定的工况循环或已知的速度规划,动态规划(Dynamic programming,DP)算法以其公认的全局最优性被广泛应用于混合动力能量管理控制,但由于实际的驾驶循环往往都是未知的且其计算负担较高而受到制约,因而难以进行实时控制而多用于评价或固定路线的能量管理[8−10].为了改善DP 算法在实际应用中的局限性,专家学者进行了各种改进与探索[11−12].另一方面,为了更好地实现实时优化控制,模型预测控制被普遍采用[13−14].比如,文献[13−14]根据驾驶员意图采用模型预测算法对转矩分配或功率需求进行瞬时预测控制,虽然能够实现实时优化,但其预测控制效果基于初始状态的选择,且无法实现全局最优.
上述能量管理研究都是针对单辆HEV 车辆进行能量管理控制,但实际道路上车辆并不是独立行驶,往往是在车流中跟随前方车辆行驶.因此,车辆的行驶还会受到前车行驶模式和速度变化的影响,所以混合动力电动汽车的能量管理需要与跟车控制相结合.车辆跟车控制方面的研究已有数十年历史,主要集中于自适应巡航控制 (Adaptive cruise control,ACC)[15−17]和车辆队列控制[18−21].车辆队列控制关注的是多个车辆的协同控制,其重点是队列稳定性.ACC 属于单车控制技术,解决的是与前车保持安全距离的巡航控制问题,已在很多中高档汽车中使用.已有的自适应巡航控制大多针对内燃机车辆,很少有混合动力电动汽车跟车控制方面的研究.本文主要考虑车辆跟随前方车辆的安全控制和跟车过程中的能量管理问题,队列稳定性并不属于本文研究范围.
混合动力电动汽车跟车控制系统更为复杂,既要考虑车辆的跟踪性能,又要考虑车辆的能量管理问题.近几年,有少量关于混合动力电动汽车跟车控制和能量管理的研究.比如,文献[22]提出基于规则的混合动力电动汽车能量管理与自适应巡航控制方法,该算法简单易实现,但无法保证性能最优;文献[23−24]分别给出一种基于驾驶员行为预测和车辆加速度预测的能量管理方法;文献[25]给出混合动力电动汽车能量管理与自适应巡航控制的动态规划和在线查表方法;文献[26]提出考虑道路坡度的HEV车辆队列控制与能量管理方法.需要指出的是,上述研究存在如下几方面的不足:1)将能量管理与车辆巡航控制综合到同一成本函数,参数较多,计算负担较重,且性能互相影响;2)车辆环境工况中未充分利用前车信息,需要进行加速度预测或假定参考值;3)无法实现道路坡度和载荷实时变化的影响.
本文旨在针对混合动力电动汽车跟车控制与能量管理综合问题,考虑前车与道路工况,提出了基于安全距离的HEV 车辆动态面控制(Dynamic surface control,DSC),然后针对安全距离内的驾驶工况,采用滚动动态规划算法进行混合动力电动汽车实时能量管理.本文主要创新点和贡献如下:
1)考虑前车对行驶工况的影响以及混合动力电动汽车能量的综合控制,通过车辆跟踪控制为动态规划算法提供工况循环,既保证了控制的最优性又解决了算法对工况预测和速度规划的要求;
2)通过基于观测器的DSC 跟车控制,考虑了道路坡度和载荷实时变动对车辆跟踪控制性能与车辆能量消耗的影响;
3)基于安全距离的滚动动态规划算法,解决了存储空间有限和在线计算负担大的问题,可实现实时能量优化管理.
本文组织结构如下:第1 节给出HEV 跟车系统、能量管理模型及控制目标,第2 节是基于安全车距的跟车控制器设计、稳定性分析以及能量管理动态规划方法,第3 节为仿真验证,第4 节是本文总结.
1 系统模型与问题描述
考虑如图1 所示的HEVs 车辆跟踪系统,其中,si、sq、vi、vq分别为当前车辆i、前车q的位置和速度,Pi为车辆i的功率需求.假设车辆已经配备了V2V 等无线通信及传感装置,能够获得前方车辆的状态信息(车辆的位置、速度).

图1 HEV 控制系统Fig.1 HEV control system
1.1 HEV 车辆动力学模型
HEV 车辆的纵向动力模型如下[27]

式中,mi、si、vi分别为当前车辆的质量、位置和速度,Fi为车辆的牵引力或制动力,Fa为车辆行驶过程中的空气阻力,Fr为滚动阻力,Fg为坡道阻力.其中,空气阻力由车辆行驶的速度、空气阻力系数CD、空气密度ρ和车辆的迎风面积A决定.

滚动阻力为

式中,µ为滚动阻力系数,g为重力加速度,θ表示道路坡度.
车辆的坡道阻力为

综合式(1)~ 式(4),车辆的动力学模型表示为

式中,b1=1/mi,b2=CDρA/2mi,b3=g,w=µcosθ+sinθ,w表示道路坡度和路面情况,未知且不确定.为方便研究,往往假定道路情况不变,忽略了道路坡度和路面变化的影响,本文则将其视为系统的扰动项,并通过控制器设计对其观测补偿以更加符合实际情况,同时也更能体现道路坡度对于HEV 能量消耗的影响.
理想的车间距定义为

式中,da为理想的车间距,即在当前车速下制动且能保证不与前车相撞的最小安全距离;sq表示前车的位置;li表示车辆的长度;k >0 为坡度系数.
注 1.文献中理想的车间距da多采用固定值[20,27],并不能很好地适应车速变化;文献[24,28]基于车速变化设定da,但往往由于车速实时变化使安全距离不断变化,从而影响控制性能.本文理想车间距da基于道路限速决定,通过智能交通系统获得当前道路限速并依据限速确定安全车距,使da既不会频繁变动,也更符合交通法规和实际情况.同时,考虑坡度对安全距离的影响,当θ >0,即车辆爬坡时,安全车距相应缩短;当θ <0,即车辆下坡时,安全车距相应增加.
1.2 HEV 功率能量模型
考虑Power-split HEV[26],其结构如图2 所示,PL指其他电器载荷,从功率平衡的角度,车辆i的功率Pi由电池功率和发动机功率共同提供,即
其中,Peng和Pbatt分别表示发动机功率和电池功率,电池功率为正表示电池正在放电,为负则代表电池正处于充电状态.ωm1,ωm2,ωeng与Tm1,Tm2,Teng分别表示电动机1、电动机2 与发动机的转速与转矩;ηm1,ηm2为电机效率.
由行星轮机构的运动关系,其转速满足

式中,ωr,ωc,ωs分别表示齿圈、行星架和太阳轮的转速,分别和发动机、电机1 和电机2 相连;α为齿圈相对于太阳轮的传动比;ωreq为车轮转速;ε为主减速器的传动比,转矩关系为

式中,Treq为车轮转矩.
根据电池内阻模型,电池的功率Pbatt为

求解式(10)

由于相同功率下,电池电压越大其电流越小.因此忽略较大取值,电池的SOC动态表示为

式中,Ibatt为电池电流,Voc表示电池输出电压,Rbatt为电池的内阻,Qbatt表示电池电量.
发动机的功率Peng由发动机转矩和转速计算得到

式中,ωeng与Teng分别表示发动机的转速和转矩.
发动机的燃油消耗率为发动机的转速ωeng和转矩Teng的函数,通常由发动机台架试验获得.图3 为Advisor 中发动机油耗map 图.

图3 发动机燃油消耗率Fig.3 Engine fuel consumption rate map in Advisor

因此,对于一定工况循化下的功率需求,根据HEV 功率平衡与行星轮机构运动关系,可以通过发动机的转矩和转速控制进行HEV 车辆的能量优化管理.
1.3 本文目标
本文的控制目标是将车辆跟踪控制与混合动力电动汽车能量管理相结合,设计控制器实现安全距离内HEV 车辆的跟踪控制以保证车辆的安全性,同时通过跟踪控制提供准确的实时工况信息以保证优化的能量管理.即满足以下两点要求:
1)跟踪稳定性:考虑实际的交通状况,即有前车的情况下进行基于安全车距da下的车辆跟踪控制,设计控制器跟踪前车速度vq,即vi →vq,并保证车辆的位置跟踪误差δi=si −(sq −da −l) 收敛到零的一个邻域内;
2)燃油经济性:以前方车辆速度vq轨迹作为当前HEV 车辆的驾驶工况,在安全车距da内,对HEV 车辆i进行实时能量优化管理.即在满足系统约束条件下,使HEV 车辆的燃油消耗成本最低:

注 2.在实际的交通状况下,若没有前方车辆,则采用虚拟车辆代替前车,以当前道路限速作为虚拟车辆的车速,以当前限速下的理想车距为安全距离.以当前限速下的理想车距为安全距离确定前车位置,既保证车辆的行驶安全性,也更符合实际的道路交通状况;车辆以当前限速为参考车速,可使车辆更接近于能耗高效区间,既有利于节省能耗,又能够提高道路的交通效率.
2 基于安全车距的车辆跟踪与能量管理
考虑存在前方行驶车辆的实际道路交通状况,将HEV 车辆的车辆跟踪与能量管理控制相结合.首先采用DSC 设计基于安全车距的跟踪控制器进行车辆位置与速度的跟踪控制,在保证车辆安全驾驶的同时为HEV 车辆能量管理提供实时驾驶工况;然后在安全距离内应用滚动动态规划算法对发动机与蓄电池功率进行优化分配,使能量消耗最小.
2.1 基于安全车距的车辆DSC 跟踪控制
为实现更好的跟踪效果并为能量管理提供准确的工况信息,在设计DSC 控制器前,首先对路面情况进行观测.
1)观测器的设计
由式(5)可得

设计观测器如下

式中,k0为观测器增益,且k0>0.
定义辅助变量z=则

将式(16)代入式(17)得

2)补偿控制器设计
驱动力由两部分构成

式中,Fdsc表示DSC 控制器输出,Fw为克服道路坡度与路面阻力的补偿控制.
将式(19)代入式(5)得

针对观测到的路面状况,设计补偿控制器

定义观测器误差

对式(22)求导


将式(21)、式(22)代入式(20),则

因此,系统(5)转化为

3)动态面控制器设计
首先,定义第一动态面为位置误差

则

取虚拟控制量

其中,k1>0.

α通过一阶滤波得到

其中,T为时间常数,T >0.
定义滤波误差

对其求导得

然后,定义第二动态面

将式(29)、式(31)、式(33)代入式(28)得

将式(29)~ 式(31)、式(34)代入式(32)得

设计DSC 控制器

其中,k2>0.
对式(33)求导,并将式(25)、式(36)代入得

定义Lyapunov 函数

对式(38)求导,并将式(24)、式(34)、式(35)、式(37)代入得
根据杨氏不等式
为保证系统的跟踪稳定性,引入下列引理.
引理 1[29].对于非线性系统,存在正定函数V满足下列微分不等式

其中,V >0,C ≥0.对于t0,V(t)满足不等式

即V(t) 以指数收敛率ς最终一致收敛于C/ς,则系统最终一致有界.
根据引理1,对于非线性系统(26),存在正定函数式(38).根据式(40),只要

则系统最终一致有界.因此,Lyapunov 函数V一致有界,适当地选择观测器增益、滤波器时间常数和控制器参数能够使得ς足够大,C/ς足够小,使观测器误差和系统跟踪误差收敛到零的一个邻域内.
注3.基于车辆非线性动态模型,对道路情况w进行观测补偿,使DSC 跟踪系统能够更好地适应道路变化,具有更好的跟踪性能;同时,既无需进行速度预测也考虑了道路坡度对HEV 车辆能量管理的影响,为HEV 的能量管理提供了保障.
2.2 基于滚动DP 的HEV 能量管理
将车辆跟踪控制与HEV 能量管理相结合,既保证了车辆的跟踪安全性,又为当前HEV 车辆提供了工况循环信息.因此,本节采用动态规划策略在安全车距内对HEV 车辆进行能量优化管理,使HEV 在满足各种约束条件下,通过优化发动机与蓄电池功率分配使系统的性能指标即燃油消耗降至最低.
根据发动机功率与转矩之间的关系式(13),HEV车辆油耗模型式(14)转化为

式中,φ(·) 表示油耗率与发动机转速、功率之间的函数关系.图4 为基于Advisor 车辆参数转化后的不同转速下车辆油耗模型.

图4 发动机燃油消耗率−功率曲线Fig.4 Engine fuel consumption rate and power
离散化控制目标为

约束条件满足

式中,(·)min与 (·)max分别表示最小值、最大值.
考虑采样时间内∆SOC(k) 的约束,进一步减少状态空间和计算量,以实现实时控制.

滚动DP 算法的计算过程如下:
1)在安全距离内进行初始化并定义时间及状态存储空间;
2)根据跟踪控制安全距离内的当前车辆i的车速轨迹,得到车辆速度和功率vi(k),Pi(k),k=N,N −1,···,1;
3)对于阶段k对应的vi(k),Pi(k),考虑阶段状态约束SOCj(k)∈[SOCkmin,SOCkmax],计算所有状态转移所对应的变化量Jij(k),并求得所有状态j对应的成本函数最优值Jk=min[Jij(k) +Jj(k+1)];
4)进入到下一阶段k=k −1,重复步骤3)直到k=1,找到成本函数最低的最优控制和状态;
5)以优化结果作为安全车距内的控制输入,滚动执行整个优化过程.
注 4.第2.1 节基于观测器补偿的DSC 控制器为安全距离内的动态规划算法提供了准确的驾驶工况循环,保证了能量管理的有效性;在安全车距内考虑单位步长内电池SOC变化的约束,使得HEV能量管理的状态空间和控制空间大大缩减,减少了计算负担,更有利于HEV 能量管理的实时性.
3 仿真研究
对HEV 车辆跟踪与能量管理进行仿真研究,并与Advisor 中的能量管理控制结果进行比较,验证所采用控制策略的有效性.
3.1 DSC 车辆跟踪控制仿真验证
考虑跟车行驶的工况,HEV 车辆参数如表1所示.假设前车按照ECE 城市工况循环行驶,总距离约为1 km,其最高限速为50 km/h,道路坡度如图5 所示,车辆初始安全距离设为30 m.DSC 跟踪控制器参数根据式(44)分别选为:k0=0.5、k1=2、k2=30、T=1,仿真结果如图6、图7 所示.

表1 HEV 车辆主要参数Table 1 Parameters of HEV
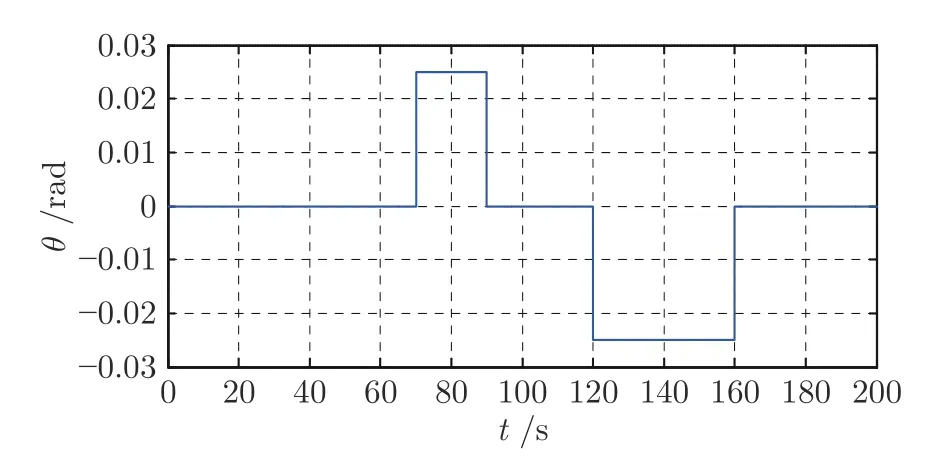
图5 道路坡度Fig.5 Road slope

图6 HEV 车辆位置Fig.6 Position profile of HEV

图7 HEV 车辆速度曲线Fig.7 Velocity profile of HEV
图6 为车辆跟踪的位置与车距变化曲线,具有较好的位置跟踪性能,且考虑了坡度的变化对车间距进行了适当的调整.图7 中,两种控制器均能实现较好的速度跟踪,但通过局部放大可以看出具有补偿控制器的DSC 控制能够更快地适应实时的速度变化,具有更好的适应性和跟踪控制效果.
3.2 能量管理优化仿真
基于跟踪控制的车速工况与功率需求,应用滚动动态规划算法进行数值仿真研究.
图8 为车速工况与功率需求曲线,由图可以看出车辆在加速过程中的功率大于零且逐渐增加;车辆速度减小时,车辆功率为负,处于再生制动状态.在图9 中,HEV 车辆电池SOC随着行驶工况与电池能量的消耗与回收而发生变化.图10 为基于跟踪工况下的HEV 功率分配曲线.当车速较低时,HEV所需的功率主要由电池通过电动机提供;随着车辆速度与功率需求的增加,发动机和电动机共同工作提供能量;当车速下降时,HEV 通过再生制动进行能量回收.表2 为采用该策略与Advisor 中能量管理策略的燃油消耗对比,百公里油耗提高了约12 %,由此可以看出本文所采用的方法具有良好的燃油经济性.

图8 速度工况曲线Fig.8 Velocity cycle of HEV

图9 SOC 变化曲线Fig.9 SOC of HEV

图10 功率分配曲线Fig.10 Power distribution of HEV

4 结论
本文研究了混合动力电动汽车的车辆跟踪与能量管理控制.考虑在有前车的道路工况下,基于安全车距设计了具有观测补偿的动态面跟踪控制算法,为HEV 车辆能量管理提供了驾驶工况,并在安全距离内对HEV 采用滚动动态规划算法进行能量管理.考虑单位步长内电池SOC变化的约束进一步缩小对SOC状态搜索空间,更有利于车辆的安全控制和实时的能量优化管理.需要指出的是,本文未考虑车辆在交叉路口、红灯或转弯时的安全车距与速度跟踪问题,我们将在后续研究中更全面地考虑各种复杂交通情况下的混合动力电动汽车跟车控制与能量管理问题,并将进一步研究多个HEV车辆的队列控制与能量管理问题.
