GNSS接收机原始观测值精度测试与分析
2022-02-17任永超张绪丰
陈 澍,任永超,张绪丰,牛 犇
GNSS接收机原始观测值精度测试与分析
陈 澍1,任永超1,张绪丰2,牛 犇1
(1.国家光电测距仪检测中心,北京 100039;2. 中铁工程设计咨询集团有限公司,北京 100055)
针对随着全球卫星导航系统(GNSS)与多种传感器的融合使用,人们对GNSS接收机原始观测值精度指标的评估需求快速增长的问题。提出分别采用零基线双差法、零基线三差法对GNSS接收机的伪距观测值精度、载波相位观测值精度进行测试。详细推导了原始观测值精度的测量原理,对4种型号各10台接收机的测试结果进行了统计分析,考察的系统和频点包括全球定位系统(GPS)L1C/A、L2、L5,伽利略卫星导航系统(Galileo)E1、E5a、E5b,北斗卫星导航系统(BDS)B1I、B2I、B3I、B1C、B2a。统计结果表明,采用零基线双差法、零基线三差法可以有效地反映接收机的原始观测值质量情况。
伪距观测值精度;载波相位观测值精度;零基线双差法;零基线三差法
0 引言
在全球卫星导航系统(global navigation satellite system,GNSS)接收机常规测试中,主要考察的技术指标有接收机内部噪声水平[1]、静态测量精度、动态测量精度等,这些指标的设定是从用户最关心的定位结果角度出发的。但是随着GNSS应用领域的不断扩大,GNSS与惯导系统、遥感、数字化、人工智能的结合越加紧密,GNSS接收机原始观测值精度指标的重要性越加凸显[2-4],对其进行科学评估的需求也更为迫切。文献[5]通过零基线单差法和超短基线单差法对北斗卫星导航系统(BeiDou navigation satellite system, BDS)三类导航卫星的码和相位观测值精度进行了评估,并与全球定位系统(global positioning system, GPS)进行了比较分析。文献[6]采用非差、单差、双差的伪距相位差值组合和多路径组合观测值,分析了BDS B1和BDS B2频率上的观测噪声,并与GPS结果进行了对比。文献[7]采用伪距相位几何无关模型,通过零基线单测站、单差、双差及历元差,分析了BDS卫星信号测距精度。文献[8]测试分析了伪距固定法、模拟器双差法、零基线双差法和伪距减载波相位法等测量方法的原始观测量精度。
本文借鉴文献[9]的相关内容,采用零基线双差法和零基线三差法,对4个型号各10台接收机进行了伪距和载波相位观测值精度测试,并对测试结果进行了统计分析。
1 观测值精度测试原理
1.1 观测模型
在卫星位置已知的条件下,只需测量接收机至卫星的距离,即可解算出接收机的位置。但是从卫星发射导航信号,经过大气层,到接收机接收处理的这一过程,不可避免地引入了各种误差。例如与卫星有关的星历误差、卫星钟差;在信号空间传播阶段受大气和地面环境影响,产生的电离层延迟误差、对流层延迟误差、多路径效应;以及与接收机相关的内部噪声等。这些误差都对观测值造成了一定的影响,从而影响到用户位置的确定[10]。综合考虑各种误差影响,建立伪距和载波相位观测方程为



1.2 伪距观测值精度
零基线双差法通过功分器将同一天线接收的信号分成功率、相位相同的两路,提供给同一型号的两台接收机,通过基于零基线的双差,可消除卫星钟差、接收机钟差、电离层延迟误差、对流层延迟误差以及多路径效应,得到伪距观测值双差残差,从而得到伪距观测值精度结果,具体测量原理如下:


然后进行星间双差,以任意一颗卫星作为基准星,其他卫星的伪距单差观测值与基准星作差,可以消除接收机钟差影响,则伪距双差观测值可表示为

因为伪距双差观测值(也可称为伪距观测值双差残差)服从零均值高斯分布,则通过某频点所有历元的伪距双差观测值,可获得其伪距双差观测值精度为


1.3 载波相位观测值精度

再进行星间双差,以任意一颗卫星作为基准星,其他卫星的载波相位单差观测值与基准星作差,则载波相位双差观测值可表示为

可以看到,载波相位双差观测值中含有整周模糊度,对于整周模糊度的处理通常有两种方法:一是进行整周模糊度的固定,再从双差观测值中去掉整周模糊度的影响;二是进行三差处理,当接收机持续锁定卫星信号时,双差整周模糊度会保持不变,所以通过历元间作差可抵消双差整周模糊度的影响[11]。
[9]的测试方法,考虑到整周模糊度固定的处理较为复杂,为了简化测试,本文采用零基线三差法,则载波相位三差观测值可表示为

则某频点的载波相位三差观测值精度为


2 实验结果与分析
对A型号、B型号、C型号、D型号4种型号的GNSS接收机进行了实际卫星信号下的静态零基线测量,每个型号各测试10台接收机,设置卫星截止高度角10°,采样间隔30 s,观测12 h。接收的卫星导航系统包括GPS、BDS、伽利略卫星导航系统(Galileo navigation satellite system, Galileo),接收频点分别为GPS L1C/A、L2、L5,Galileo E1、E5a、E5b,BDS B1I、B2I、B3I、B1C、B2a。因为格洛纳斯卫星导航系统(global navigation satellite system, GLONASS)M卫星采用频分多址的方式,在双差观测方程中无法消除接收机时钟相对偏差的影响[12],计算的伪距观测值精度并不理想。
2.1 伪距观测值精度测试结果分析
分别统计了A型号、B型号、C型号、D型号4种型号接收机各频点伪距观测值精度的算数平均值和标准差其结果如表1、图1、图2所示。由表1、图1、图2可见,伪距观测值精度的算术平均值均小于12 cm。B型号、C型号的伪距观测值精度最优,D型号次之,A型号最差。
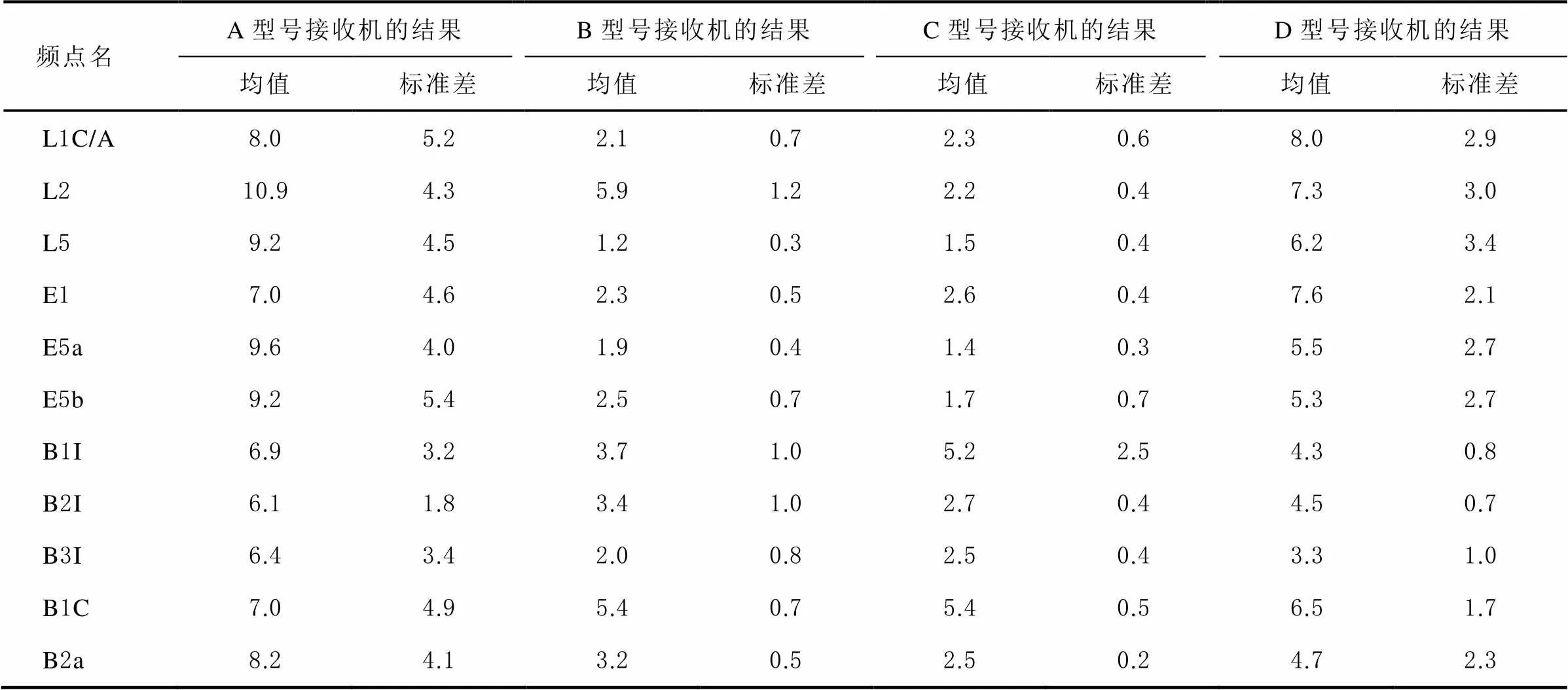
表1 伪距观测值精度统计表 单位:cm
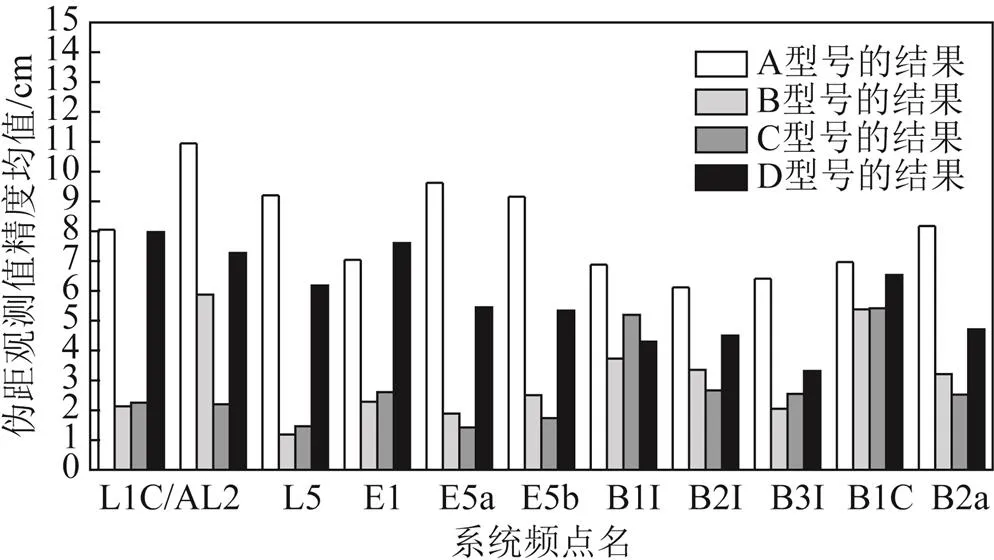
图1 四种型号接收机各频点伪距观测值精度的算数平均值
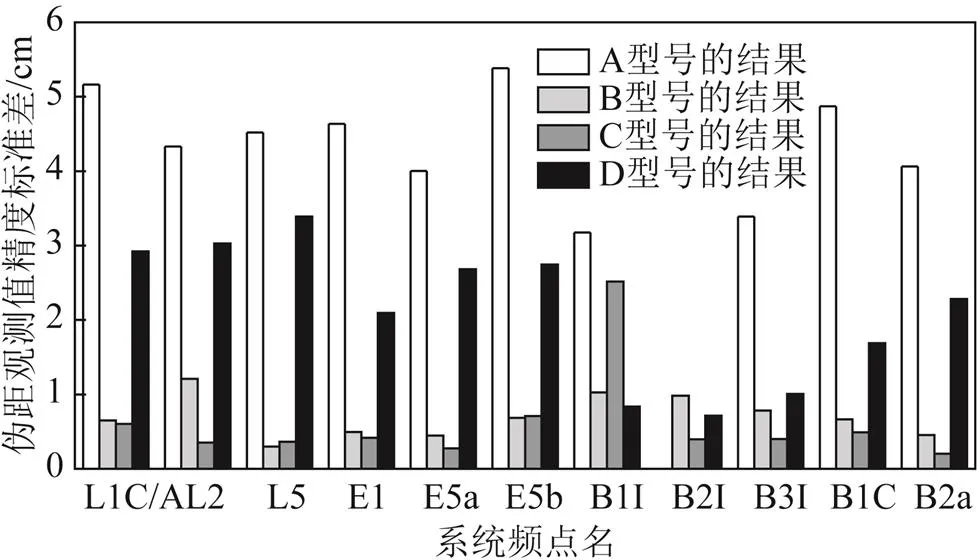
图2 四种型号接收机各频点伪距观测值精度的标准差
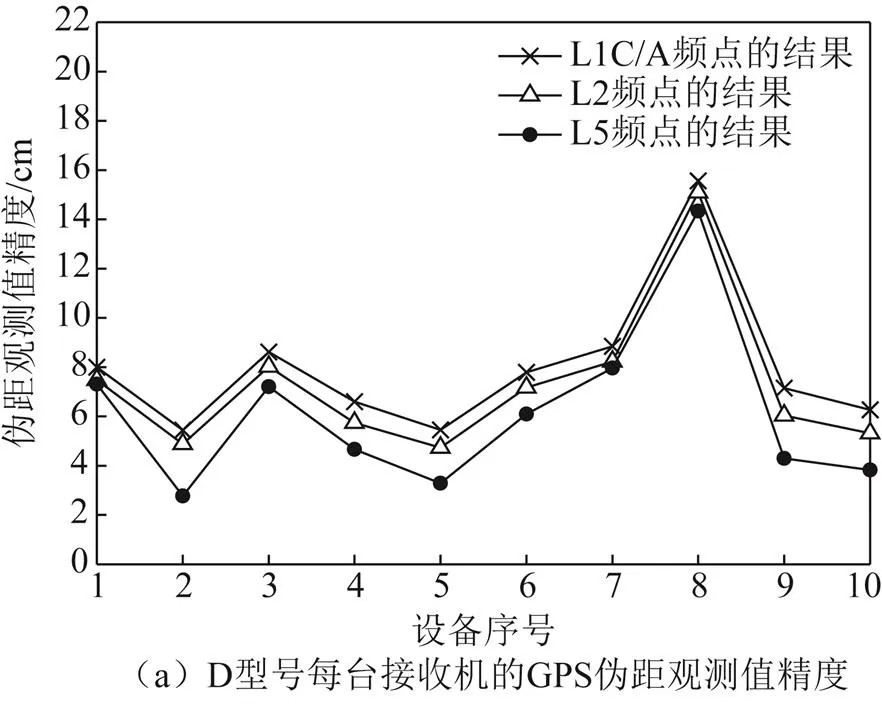
图3至图6分别为A型号、B型号、C型号、D型号4种型号每台接收机的伪距观测值精度情况。同型号接收机GPS、Galileo、BDS三系统的图形趋势一致,反映了接收机在伪距观测值精度上的个体差异。从各导航系统上看,GPS L5的伪距观测值精度较好,L2较差;Galileo各频点伪距观测值精度差异较小;BDS B3I的伪距观测值精度较好,B1C较差。
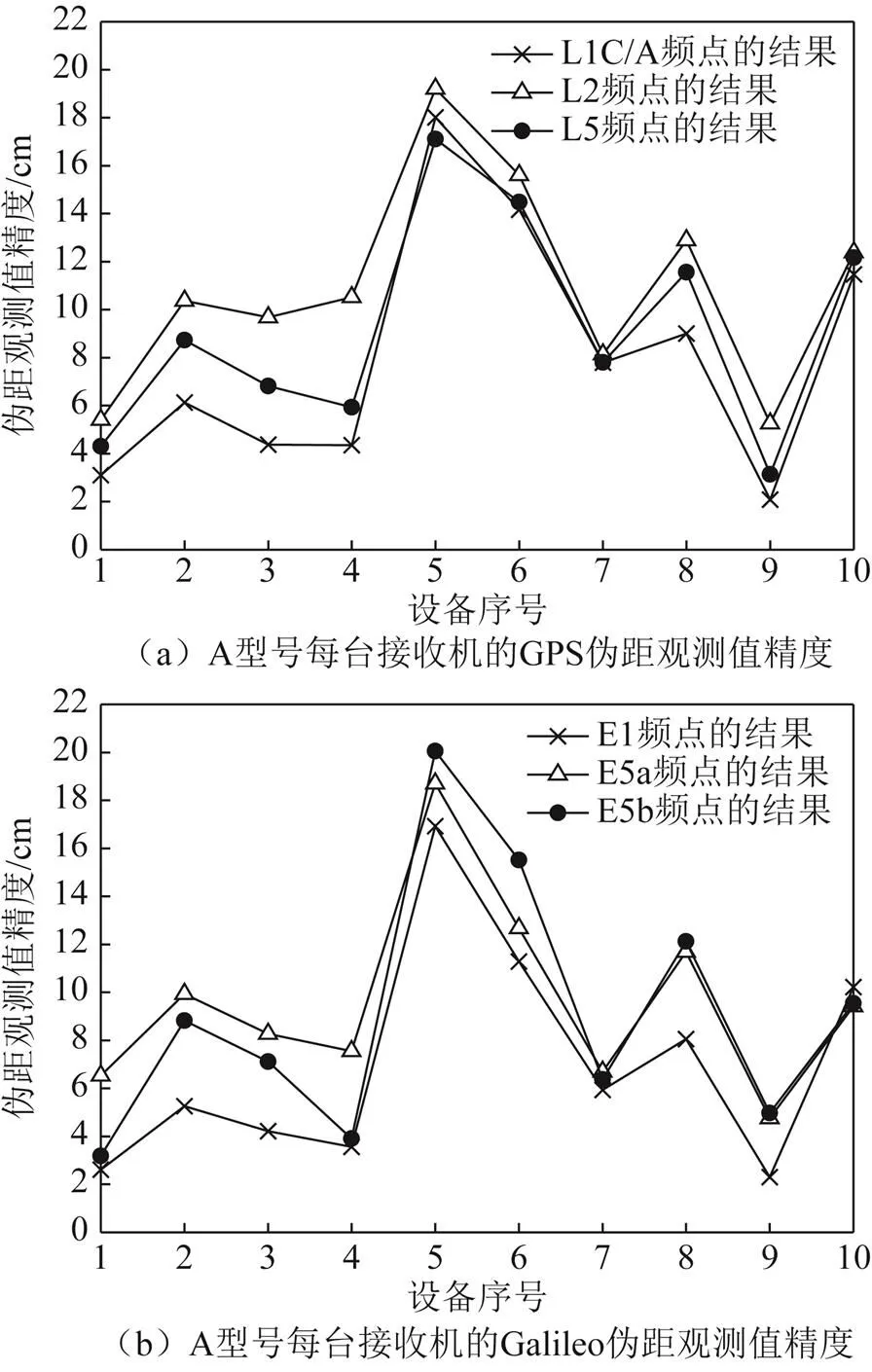

图4 B型号每台接收机的GPS/Galileo/BDS伪距观测值精度
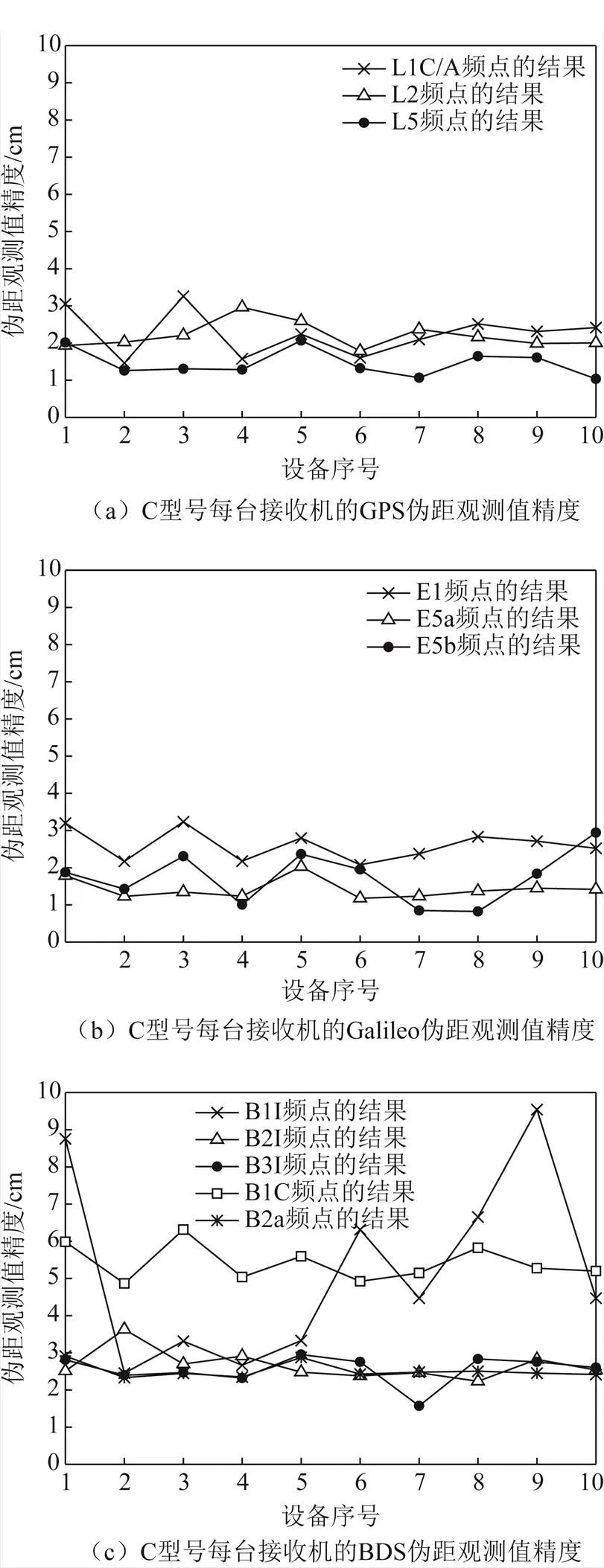
图5 C型号每台接收机的GPS/Galileo/BDS伪距观测值精度
2.2 载波相位观测值精度测试结果分析
分别统计了A型号、B型号、C型号、D型号4种型号接收机各频点载波相位观测值精度的算数平均值和标准差,其结果如表2、图7至图9所示。由表2、图7、图8可见,载波相位观测值精度的算术平均值均小于1.5 mm。A型号接收机在L2频点的均值远大于其他型号和频点,如图7、图9所示。除A型号L2频点外,各频点的算术平均值均小于1.0 mm。
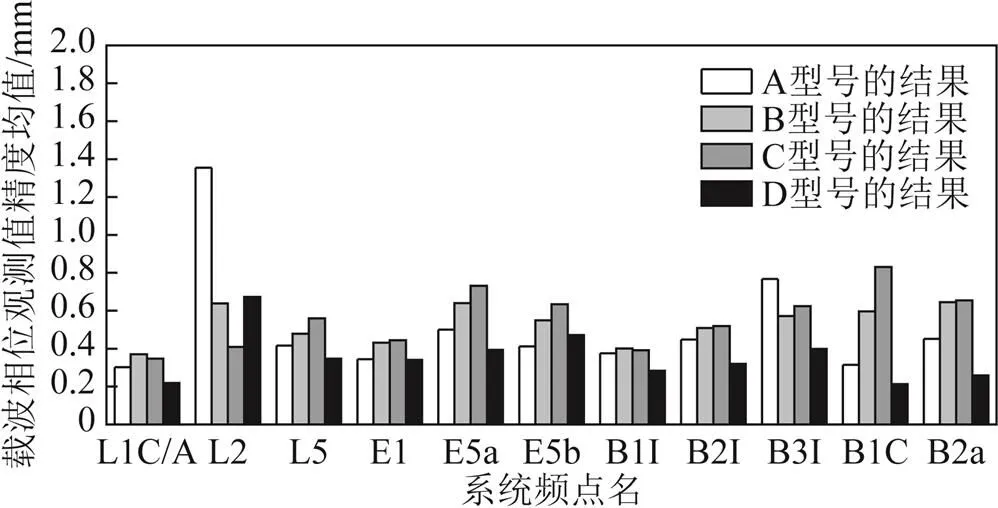
图7 四种型号接收机各频点载波相位观测值精度的算数平均值

图8 四种型号接收机各频点载波相位观测值精度的标准差

图9 A型号每台接收机的GPS载波相位观测值精度

表2 载波相位观测值精度统计表 单位:mm
3 结束语
本文介绍了零基线双差法、零基线三差法评估原始观测值精度的测量原理。基于零基线的双差,消除了卫星钟差、接收机钟差、对流层延迟误差以及多路径效应的影响,得到伪距双差残差,从而得到伪距观测值精度结果。通过历元间作差,可抵消双差整周模糊度的影响,得到载波相位三差残差,从而获得载波相位观测值精度结果。
通过实测4种型号各10台接收机的静态零基线数据,得到了每台接收机各频点的伪距和载波相位观测值精度。经过统计分析,GPS L5的伪距观测值精度较好,L2较差;Galileo各频点伪距观测值精度差异较小;BDS B3I的伪距观测值精度较好,B1C较差;4种型号接收机各频点的伪距观测值精度的算术平均值小于12 cm,载波相位观测值精度的算术平均值小于1.5 mm。采用零基线双差法、零基线三差法可以有效地反映接收机的原始观测值质量情况。
参考文献
[1] 张锐, 蔡艳辉, 翟清斌. 现代GNSS接收机内部噪声水平评定[J]. 中国计量, 2010(12): 97-99.
[2] 刘琳, 席瑞杰. GPS/GLONASS/BDS/Galileo系统载波相位观测值质量对比分析[J]. 全球定位系统, 2019, 44(1): 16-22.
[3] 陈波, 高成发, 刘永胜, 等. 安卓手机终端原始GNSS观测数据质量分析[J]. 导航定位学报, 2019, 7(3): 87-95.
[4] 刘万科, 史翔, 朱锋, 等. 谷歌Nexus 9智能终端原始GNSS观测值的质量分析[J]. 武汉大学学报(信息科学版), 2019, 44(12): 1749-1756.
[5] YANG Yuanxi, LI JinLong, WANG Aibing, et al. Preliminary assessment of the navigation and positioning performance of BeiDou regional navigation satellite system[J]. Science China: Earth Sciences, 2014, 57(1): 144-152.
[6] 程鹏飞, 李玮, 秘金钟. 北斗导航卫星系统测距信号的精度分析[J]. 测绘学报, 2012, 41(5): 690-708.
[7] 赵小平, 刘文龙, 曹新运. 零基线分析北斗信号测距精度[J]. 测绘科学, 2014, 39(11): 25-61.
[8] 笪腾飞, 范桂峰, 崔晓伟, 等. GNSS接收机原始观测量精度测量方法研究[C]//中国卫星导航系统管理办公室学术交流中心. 第九届中国卫星导航学术年会论文集. 北京: 中国卫星导航系统管理办公室, 2018: 135-140[2021-10-16].
[9] 中国卫星导航系统管理办公室. 北斗/全球卫星导航系统(GNSS)测量型OEM板性能要求及测试方法: BD 420002-2015[S]. 北京: 中国卫星导航系统管理办公室,2015: 11-12.
[10] 黄丁发, 熊永良, 袁林果. 全球定位系统(GPS): 理论与实践[M]. 成都: 西南交通大学出版社, 2006: 66-71.
[11] 陈晓辉, 田慧, 王涛. BDS/GPS双差组合观测数据周跳探测与修复方法研究[J]. 测绘科学, 2020, 45(11): 33-40.
[12] 李建文, 郝金明, 李军正, 等. GPS/GLONASS载波相位测量模糊度解算方法[J]. 测绘学院学报, 2004, 21(3): 163-168.
Testing and analysis of the precision of GNSS receiver raw observations
CHEN Shu1, REN Yongchao1, ZHANG Xufeng2, NIU Ben1
(1. National Calibration Center for Electro-optical Distance Meter, Beijing 100039, China; 2. China Railway Engineering Consulting Group Co. Ltd., Beijing 100055,China)
In order to solve the problem of fast-growing assessment need of the precision of Global Navigation Satellite System (GNSS) receiver raw observations,with the fusion of GNSS and various sensors.Double-differenced method of zero baseline and triple-differenced method of zero baseline are proposed to test the precision of code and carrier phase measurement.The measurement principle of the precision of raw observation is deduced in detail,the test results of 10 receivers of 4 models are statistically analyzed,and the systems and frequencies include Global Positioning System (GPS) L1C/A, L2, L5,Galileo navigation satellite system (Galileo) E1, E5a, E5b, BeiDou navigation satellite System (BDS) B1I, B2I, B3I, B1C, B2a. The statistical results show that,double-differenced method and triple-differenced method of zero baseline can effectively reflect the quality of receiver raw observations.
precision of code measurement, precision of carrier phase measurement, double-differenced method of zero baseline,triple-differenced method of zero baseline
P228
A
2095-4999(2022)01-0140-07
陈澍,任永超,张绪丰,等. GNSS接收机原始观测值精度测试与分析[J].导航定位学报,2022,10(1): 140-146.(CHEN Shu, REN Yongchao, ZHANG Xufeng, et al.Testing and analysis of the precision of GNSS receiver raw observations[J].Journal of Navigation and Positioning,2022,10(1): 140-146.)
10.16547/j.cnki.10-1096.20220121.
2021-11-18
陈澍(1985—),女,辽宁锦州人,硕士,高级工程师,研究方向为导航定位设备的测试与应用。
