基于改进联合扩展卡尔曼算法的AGV车SOC估算研究
2022-02-16张思为
张思为
(武汉交通职业学院,湖北 武汉 430065)
0 引言
自动引导车(Automated Guided Vehicle,AGV)作为一种智能化工具具有较为先进的特性与功能,不需要借助工作人员进行实时的操作。其优异的性能主要是在生产环境中,可以以较高的效率完成对物料的搬运,减少了人力的使用,操作人员只需控制AGV车进行工作,不需再进行繁重的体力劳动[1]。通常来说,在AGV车的结构构成中,使用的驱动形式多为轮式驱动,主要借助电池来进行动力的供应,与电动汽车的特征具有相似性[2]。
AGV车作为一种自动化的搬运移动设备,在各个行业中的需求与日俱增,特别是在物流仓库、智能生产车间以及港口等领域。目前,AGV车大都是以锂电池作为动力源,使用电动机作为驱动动力,受运行工况和电池充放电的影响,AGV实时电池SOC估算的偏差较大,常用的安时积分法在特殊工况下电池剩余容量(State of Charge,SOC)估算准确度和实时性较低,难以满足AGV车的工业生产需求。
1 联合扩展卡尔曼(Joint-EKF)算法分析与改进
扩展卡尔曼滤波(EKF)算法根据锂离子电池非线性的特点,将系统进行线性优化处理,再采用卡尔曼滤波法进行最优估算[3]。联合扩展卡尔曼滤波(Joint-EKF)是将电流漂移噪声也作为状态变量进行预测,降低电流漂移噪声对SOC估算的不利影响[4]。为了解决扩展卡尔曼电池SOC估算中的问题,对扩展卡尔曼算法和联合扩展卡尔曼算法之间的差异进行分析,联合扩展卡尔曼算法在解决电流漂移对电池SOC估算影响上具有一定的优越性。这一算法能够考虑到电池存在的电流漂移现象,同时,可以把电流漂移数值看作是状态量值,并将得到的状态变量代入电池SOC估算的联合扩展卡尔曼算法迭代中进行计算。此外,当电池处于运作状态下,如果有电流突变出现的话,能够减弱电压滞后产生的干扰,降低SOC估算的误差值。在联合扩展卡尔曼算法的应用下,可以获取电池SOC估算的状态方程和测量方程为:
(1)
yk=UL(k)=UOC-U1(k)-IL(k)R0+Id(k)R0+vk
(2)
在式(1)和式(2)中,参数T表示为联合扩展卡尔曼算法进行电池SOC估算时的采样周期,参数τ表示是估算的消耗时间常数,一般在实际应用中,需要结合实际的应用场合和需求,利用参数确定的经验关系方程运算能够得出此值,τ=R1C1,ωk为过程噪声数值,vk为观测噪声值。为了降低非线性因素对估算精度产生的影响,需要执行和扩展卡尔曼算法相同的操作,即最大程度地把所有能够影响估算的因素考虑进去。联合扩展卡尔曼算法在使用过程中可以考虑到此时SOC情况、电池运作一定时间后形成的极化电压以及电流漂移噪声Id等。当执行估算操作时,会将这些要素看作是状态变量进行计算,得出的状态矩阵为:
xk=[SOC(k),U1(k),Id(k)]T
(3)
在估算过程中,尽可能达到最高的精确度是最终SOC的估算目标,为了接近这一目标,选取联合扩展卡尔曼(Joint-EKF)算法。根据联合扩展卡尔曼算法的实现步骤得到的电池SOC流程如图1所示。
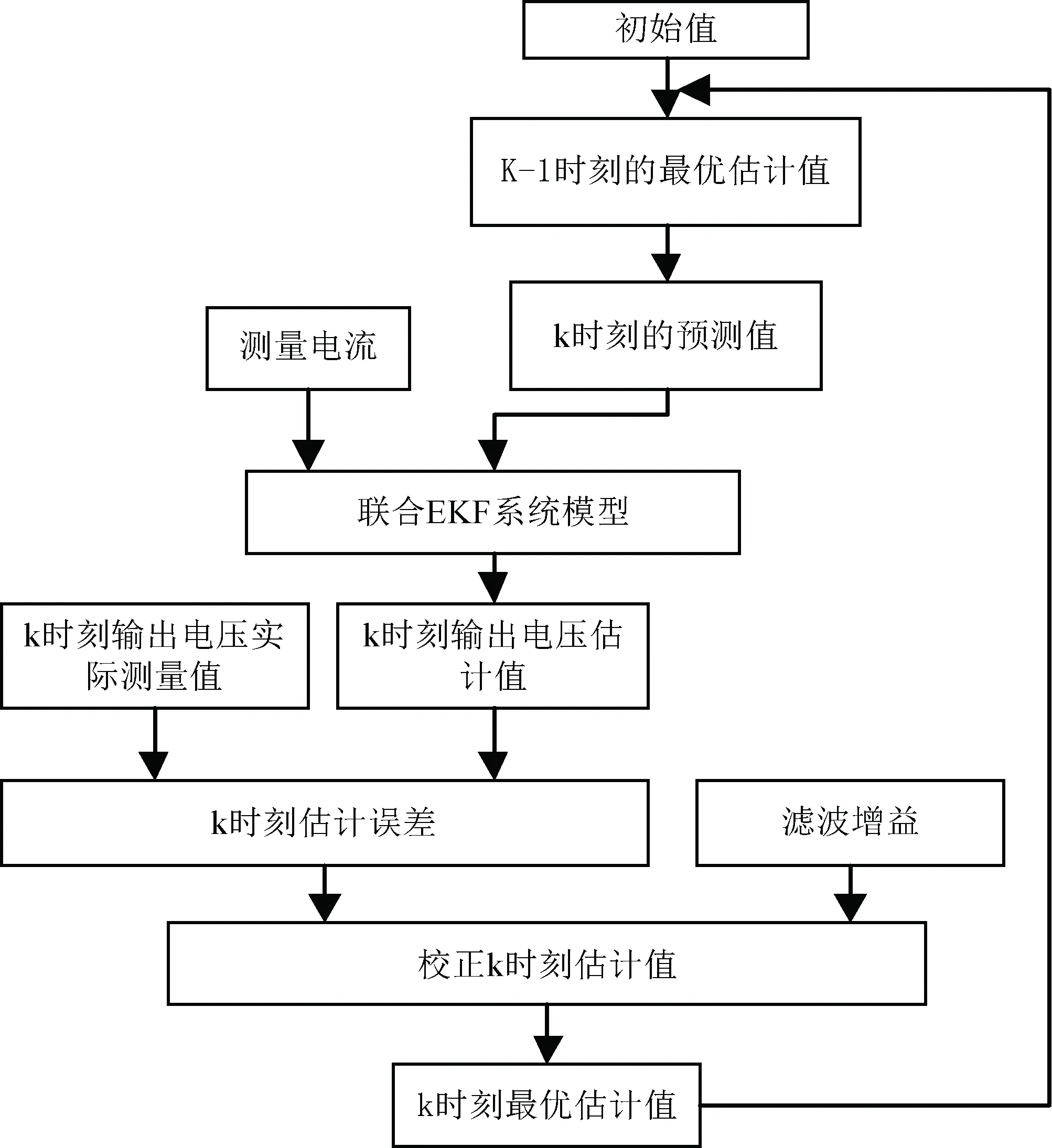
图1 联合扩展卡尔曼(Joint-EKF)算法流程

(4)
(5)
为了提高估算算法的动态跟踪性能和响应速度,对算法进行了准确的修正,在增益系数中引入调整因子α进行调控,对调整因子α的取值需要范围和整定方式需要进行研究,根据已经掌握的研究方法,利用实验测试数据分析的方法进行确定。根据调整因子的作用和影响因素,利用对电池仿真测试的方法得到多组样本测试数据,通过仿真软件进行数据拟合,得到调整因子α的取值范围。将得到的α的取值范围进行估算测试,对数据范围逐渐缩小,可以得到在电池SOC初值为0.9时的估算曲线,如图2所示。
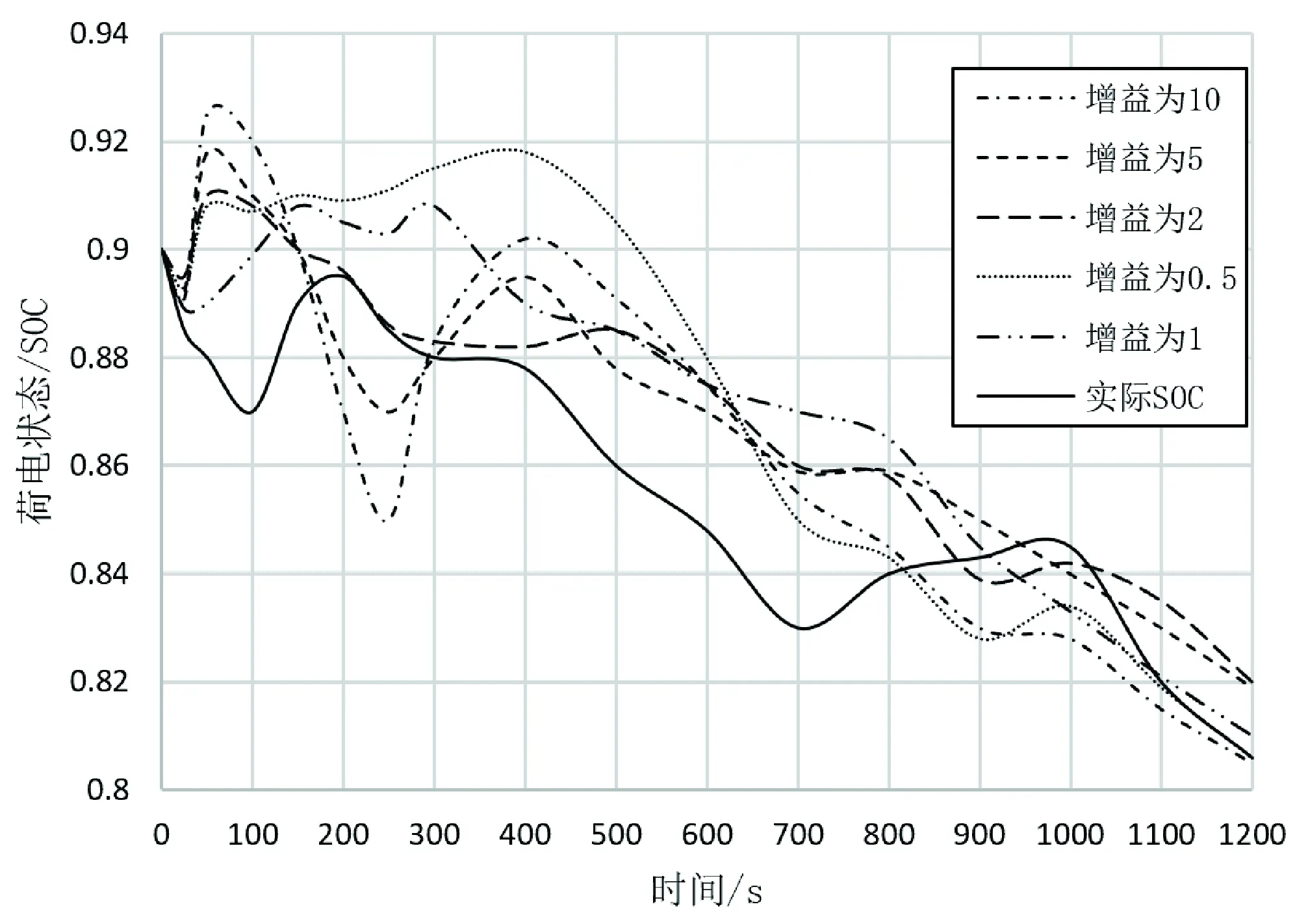
图2 不同增益系数SOC估算曲线
根据图2的结果分析知道,在电流变化的情况下,SOC估算与动态调整因子α有着重要的关系,在比较各个取值之后能够了解到,当α取值区间在[1,2],此时SOC估算得出的曲线走向与实际曲线比较靠近,估算得出的结果也更为准确。在区间[1,2]进行α的最优值研究,得到的实验测试数据如表1所示。
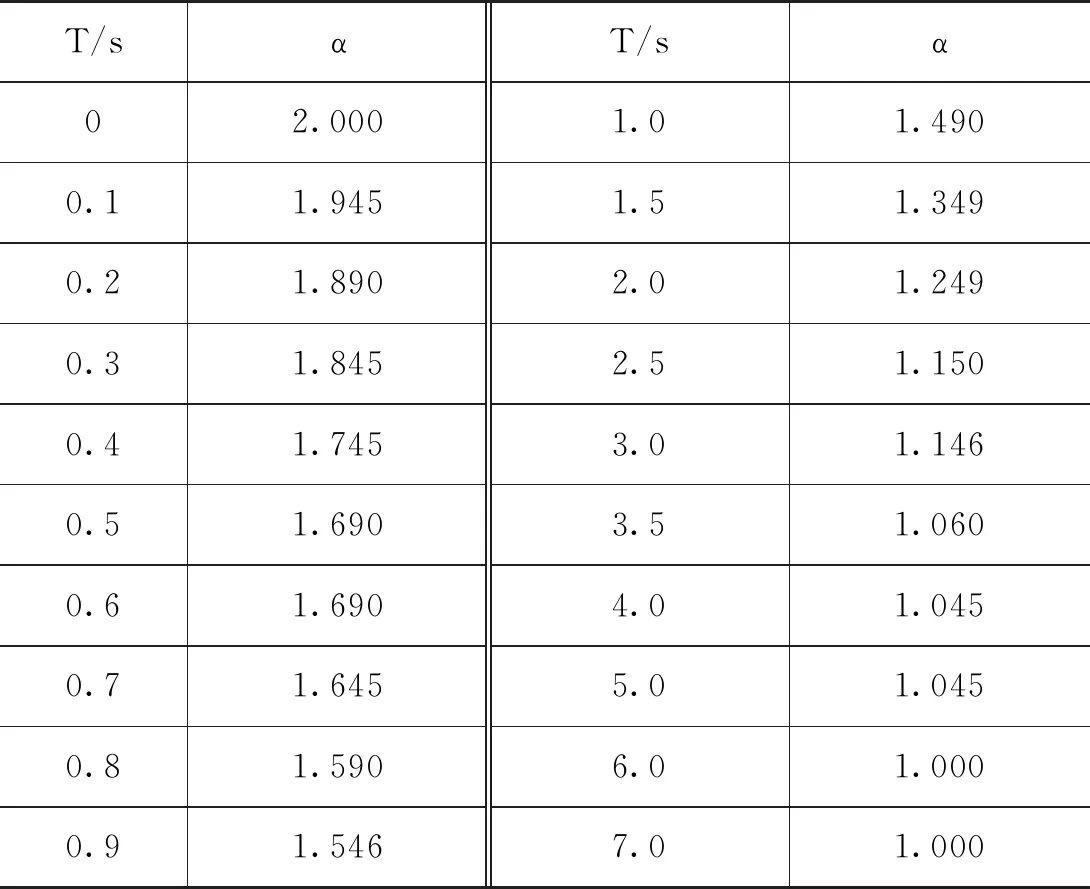
表1 不同调整因子α收敛实验数据
借助仿真软件平台,对获取的实验数据展开处理,舍弃较为离散的数据,对得到较为集中分布的数据进行拟合,得到的调整因子α取值函数拟合曲线如图3所示。
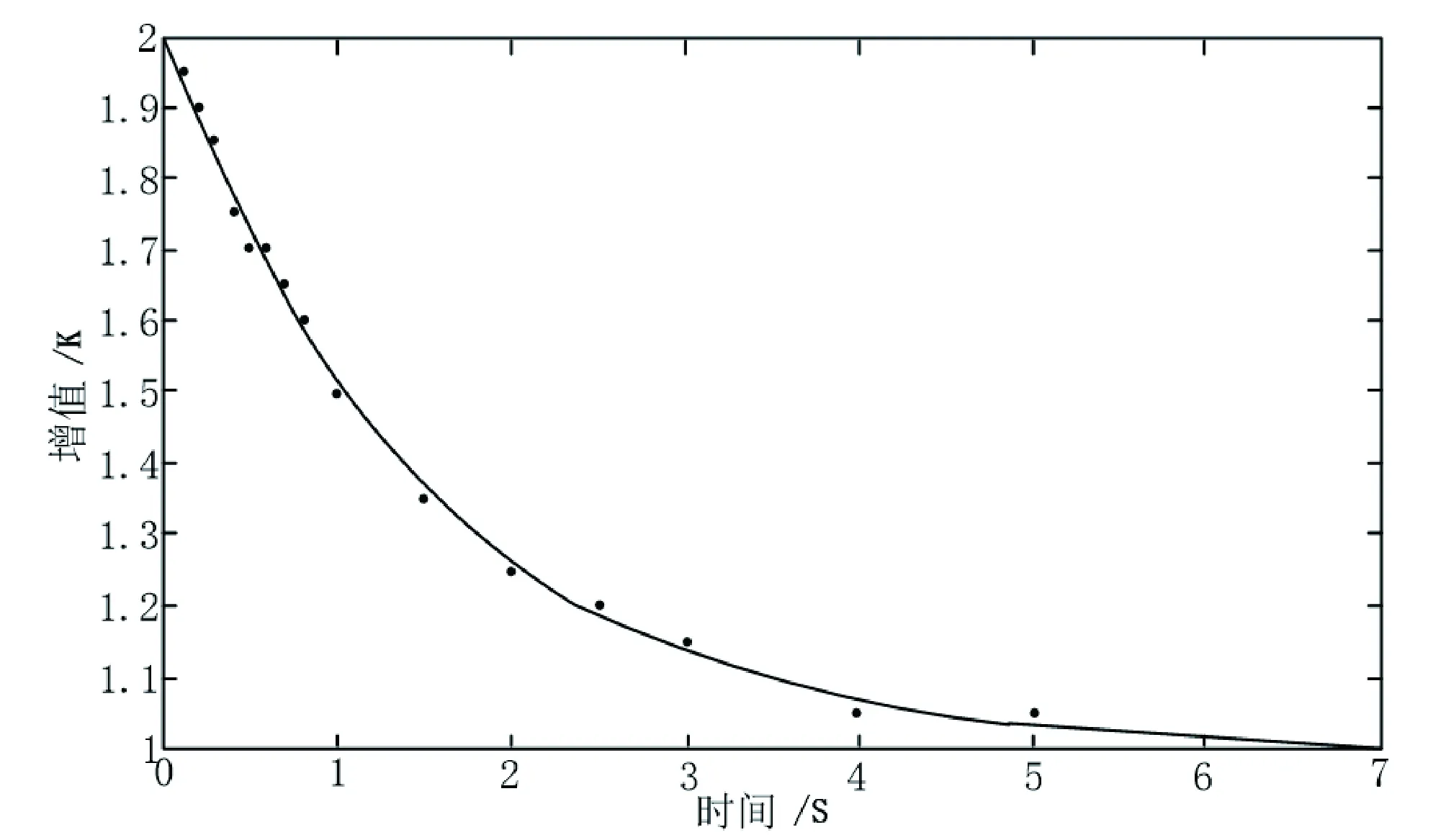
图3 调整因子取值函数拟合曲线
模拟拟合得到的调整因子取值曲线可以建立能够进行表示的数学模型,建立的数学表示式为:
α=1.018e-0.669 2t+0.995 3
(6)
对式(6)进行化简,可以得到:
α=0.6t+0.995 3
(7)
根据简化后的调整因子α的取值函数进行分析,可以将α的取值函数作为指数函数,得到Joint-EKF算法中的动态增益的函数,表示为:
(8)
2 AGV车工况分析
AGV车的功能是完成对物体的搬运任务,需要配合流水线的工作速度,在工作中一般不会预留专门的充电时间,一般的设计是在流水工序等待的间隔期内实现充电,能够用于充电的时间较为短暂,在此条件下,就要求AGV车的充电电流比一般使用的电池充电电流要大得多。但是在正常工作的情况下,AGV车由于搬运的货物质量不大,需要的功率较小,所以需要的放电电流较小,一般是在0.5 C之内。根据AGV车的充放电工况特点可以得到20 min内充放电情况,如图4所示。
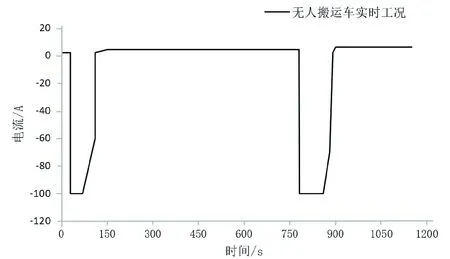
图4 AGV车实际运行工况电流变化
从图4可以看出,在运行的20 min内,AGV车进行了两次充电,但是充电的时间较短,充电电流较大,达到了100 A,将近1.5 C的倍率;0电流是放电阶段,可以看出大部分时间都是处于放电状态,放电电流仅有5 A左右,放电倍率是0.1 C左右,AGV车在短时间内的较大的充电电流和长时间的较小的放电电流的工况要求电池SOC估算精度更高。
3 AGV车SOC估算结果仿真对比分析
根据AGV车在实际工作中的运行工况,将其实时工作的数据进行采集,得到运行的数据样本,并利用这些数据对AGV车在运行中的充放电电流的特性进行模拟,能够保证仿真试验和真实工况的一致性。将得到的AGV车的实时工况数据进行处理,利用算法对数据进行拟合,可以得到AGV车在工作中的实际电流的变化情况。在经过对比实际数值与通过模拟数据进行处理后的数值间的区别性,能够真实地将AGV车的实际工况模拟出来,并利用得到的模拟数据对SOC估算算法进行试验,通过对不同测试方式的比对,证明联合扩展卡尔曼算法能够有效地进行SOC估算,即分别利用安时积分法、扩展卡尔曼滤波法、改进联合扩展卡尔曼滤波法3种方法进行SOC估算,经过算法计算得到的仿真结果如表2所示。
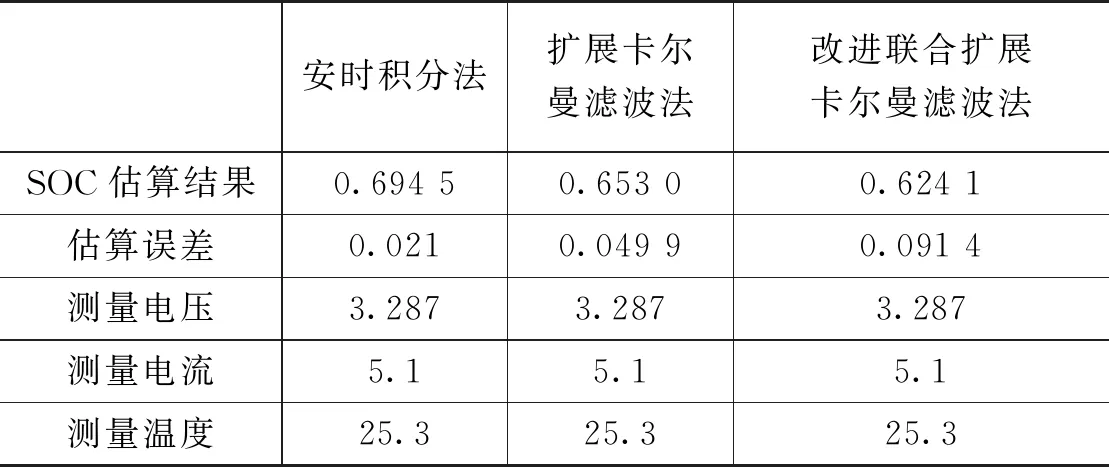
表2 SOC估算结果仿真对比分析
利用这种仿真方法,虽然实验不是现场进行的测试,但是通过现场数据及模拟程序完全能够将AGV车实际工况模拟出来,能够保证仿真数据和实际工况数据的一致性,可以保证在仿真中不受现场环境的干扰,有利于不同SOC估算算法的对比分析。
安时积分法是在电池SOC估算中常用的方法,一般是将其估算值作为基准值。但是安时积分法进行SOC估算时估算的精度依赖于给定的SOC初值,只有初值准确的情况下才能对SOC进行正确的估算。为了验证安时积分法和扩展卡尔曼滤波法在对SOC估算初值的依赖问题,安时积分法的初值利用准确的值,扩展卡尔曼滤波法使用的初值利用有一定偏差的初值。利用AGV车的工况数据对两种算法进行仿真测试,得到的SOC估算仿真结果和误差对比结果分别如图5和图6所示。
根据得到的安时积分法和扩展卡尔曼滤波法估算SOC仿真结果图5和图6可知,在给定初值正确的情况下,安时积分法估算AGV车运行工况中的电池SOC值误差较大,最大误差超过7%。在给定一定偏差初值的情况下,扩展卡尔曼滤波法经过估算算法迭代后能够快速收敛到SOC真实值,并且能够与不同工况下的SOC值保持一致,相比安时积分法具有较小的估算误差,最大估算误差不到4%,证明了扩展卡尔曼滤波法估算SOC不依赖给定初值的优点,具有较高的SOC估算精度。
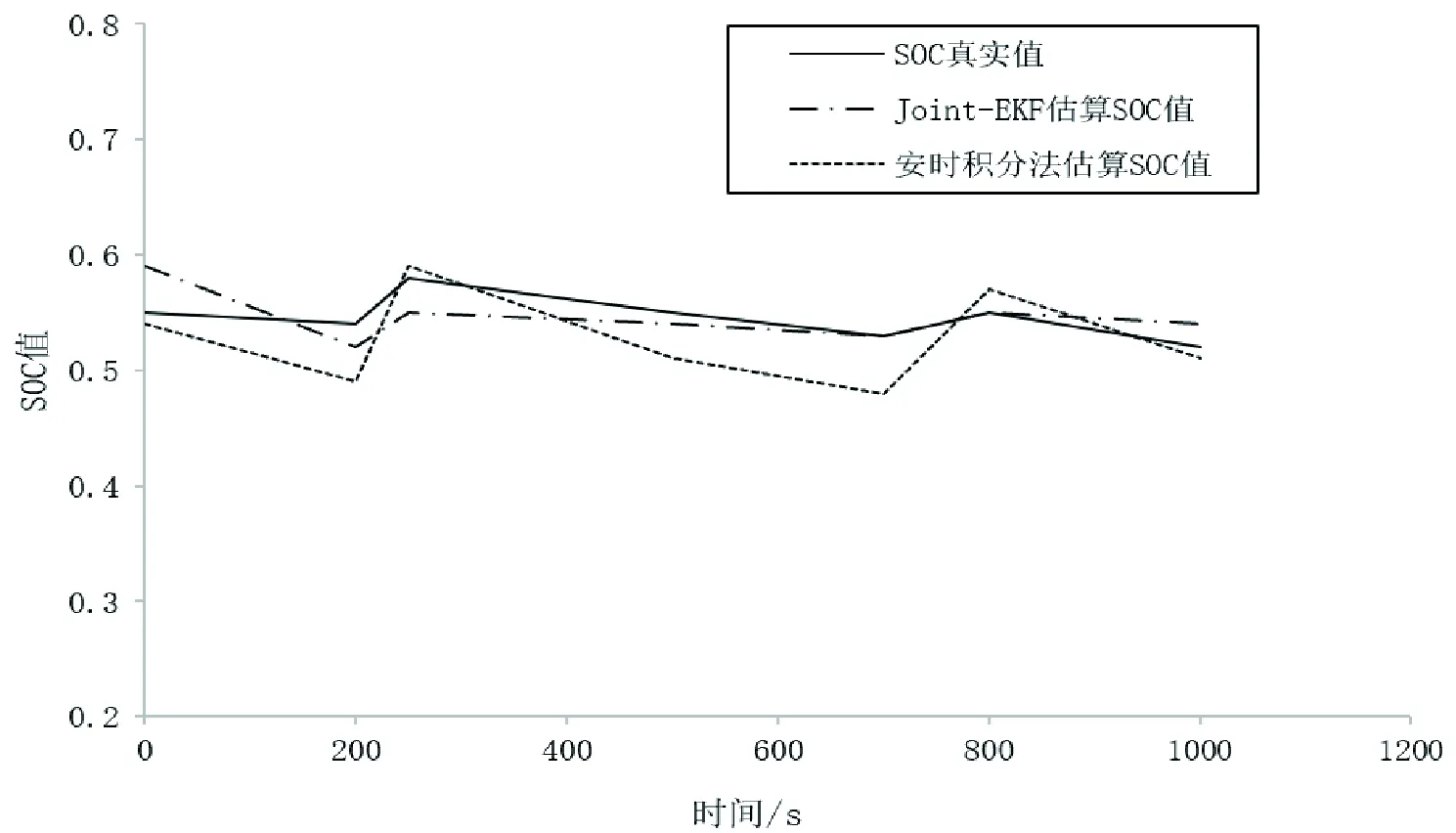
图5 安时积分法和扩展卡尔曼滤波法估算SOC值结果对比
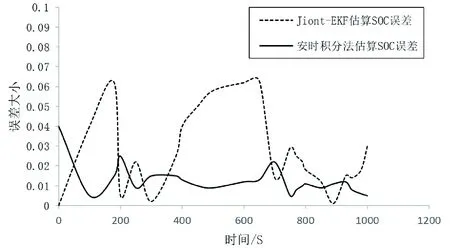
图6 不同估算算法估算SOC误差对比
但是,从图5中可以发现,在电流发生突变的情况下,Joint-EKF估算的SOC值与真实值之间存在较大的偏差,即是当AGV车的运行工况发生变化,电流发生突变时,Joint-EKF估算的SOC值和SOC真实值相比,存在较大的滞后性。根据联合扩展卡尔曼算法的分析,算法在观测电压上存在滞后性,造成了在电流发生突变的情况下SOC的估算出现滞后。所以,为了避免这一现象带来的估算干扰,就要求当出现电流突变状况时,强化算法跟踪速度,同时,将Joint-EKF修正速度快速提升。
为了解决Joint-EKF在特殊工况下跟踪效果差的问题,对Joint-EKF进行了改进,即将Joint-EKF中的增益改进成动态调整增益,在该实验中β=0.5,φ=1,对改进后的算法进行实验,结果如图7所示。
从得到的改进联合扩展卡尔曼滤波法估算SOC结果图7可以看出,在电流发生突变后,改进后的Joint-EKF能够快速地收敛到SOC的真实值,和Joint-EKF得到的SOC估算结果相比,更加接近真实值,为了能够更加突出在AGV工况发生变化,即是电流发生突变的情况下的改进后的Joint-EKF的快速跟踪性能,在突变的区域中进行重点研究,将突变的局部图进行放大,得到联合扩展卡尔曼滤波法改进前后估算SOC跟踪效果,对比结果如图8所示。
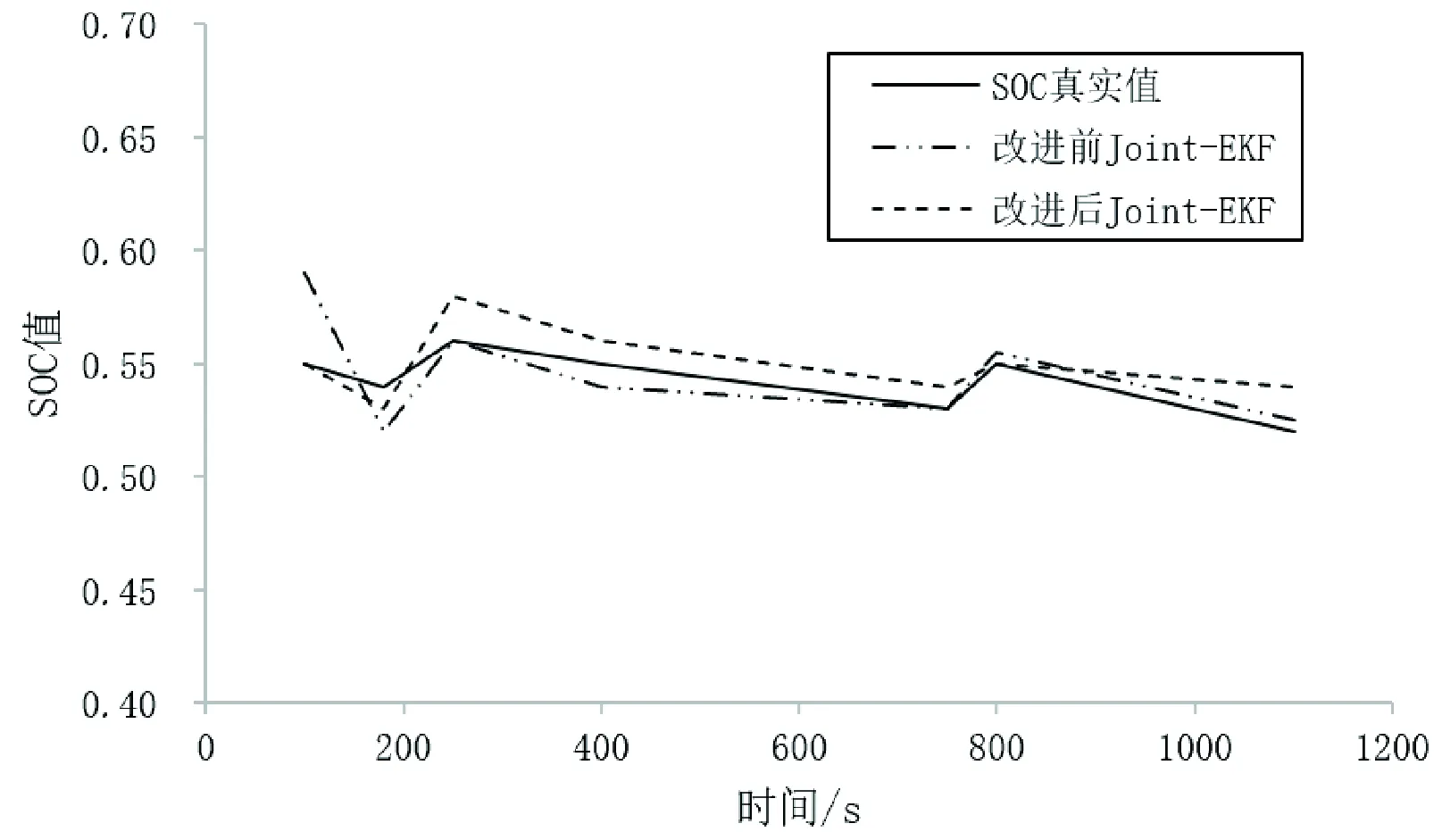
图7 改进联合扩展卡尔曼滤波法估算SOC结果对比
由图8可以看到,在发生变流突变的情况下,和Joint-EKF估算SOC相比,改进后的Joint-EKF可以更加快速地跟踪SOC真实值,在电流发生突变后,改进后的Joint-EKF在SOC估算跟踪上提高了70%。结果证明了改进后的Joint-EKF估算AGV车电池SOC具有更优的性能,能够解决AGV车特殊工况下SOC估算。并且对用联合扩展卡尔曼滤波法改进前后估算SOC跟踪效果进行对比,改进后的Joint-EKF算法估算的SOC精度大大提高。
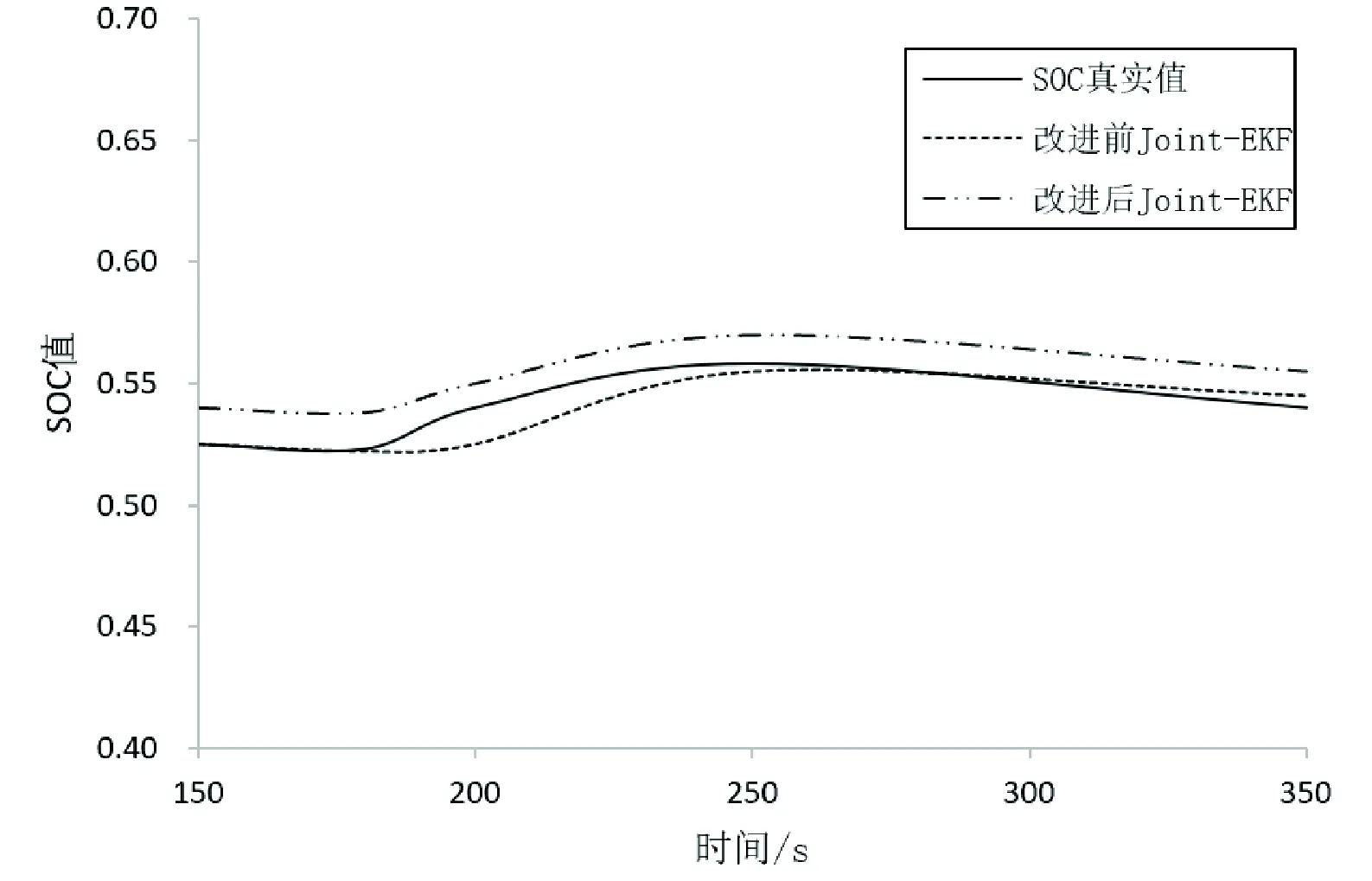
图8 联合扩展卡尔曼滤波法改进前后估算SOC跟踪效果对比
4 结语
AGV车的锂离子电池SOC估算是一个动态非线性系统,为了提高SOC估算精度和解决电流漂移问题对电池SOC估算造成的影响,经过算法的比对,利用联合扩展卡尔曼滤波算法应用至电池SOC估算中,为了解决算法在电流发生突变估算算法跟踪慢的问题,引入了调整因子对增益系数进行修正得到动态增益系数,并利用动态增益系数改进联合扩展卡尔曼滤波算法,提高在电流突变时估算算法的跟踪性能和响应速度,降低误差。针对AGV车运行时的特殊工况,设计了不同工况下的数据对比仿真,得到的仿真结果也证明了提出的Joint-EKF算法改进的有效性,提高了AGV车电池SOC估算的准确性和实时性。
