基于5G网络的云化移动机器人部署方式研究
2022-02-16张慧
张 慧
(南京中兴新软件有限责任公司,江苏 南京 210012)
0 引言
工业自主移动机器人(Autonomous Mobile Robot, AMR)是广泛用于仓储、产线物流中完成货物搬运的工业移动机器人,能够自动根据任务进行路径规划和自动行驶,并具备安全保护功能。AGV有传统的磁条、磁钉、有轨、二维码等的导航方式,也有基于激光雷达、视觉的自然导航方式。自然导航有着部署及运行灵活的优势,能更好地适应柔性化生产需要,是AGV发展的方向。本文以基于激光雷达的自然导航为例,不再赘述其他类似的导航方式。
AGV系统为了完成自动的物流搬运功能,需要进行复杂的计算,故云化AGV的概念被提出。将复杂的计算进行云化,降低本地部署部分的成本。同时,云化部分具备资源共享、动态互备、资源弹性升缩的优势。因为AGV是移动的,无法通过有线方式直接接入云,所以本文讨论的是基于5G网络的云化AGV的部署方式。
1 云化AGV的部署问题
解决本地端和云端的通信问题是云化的基础。通常工厂或仓储中的无线网络以WiFi为主,其具有部署便利的优点。但WiFi容易受到干扰,经常会出现由于信号不好或被干扰导致AGV停运的事故;另外,在较大空间部署时,AGV无法完成在多个AP之间的平滑无缝切换;AP之间的组网、网络优化和维护也是个困难。一方面,基于5G的网络连接方案可以解决干扰和信号覆盖问题;另一方面,网络的规划、优化和维护由运营商来解决,使用方只需按需购买服务即可,这提高了效率。故用5G替换WiFi是一个较好的无线网络的选择。
常见的百度云、电信云等都属于集中部署方式的公有云。随着AR/VR、工业互联网、车联网等新技术的发展,一方面是移动性的需求,一方面对时延、带宽提出了更高的要求。5G NFV、SDN、云计算的发展催生了多接入边缘计算技术(Multi-Access Edge Computing,MEC)[1]。
MEC是一种技术架构的创新,可以让业务更加灵活地选择部署的位置,除了中心云以外,还可以部署在不同的网络边缘云上。
网络边缘既可以承担中心云部分下沉的业务,使业务更靠近现场,减少业务时延;也可以承担现场侧边缘部分上移的业务,以减轻现场边缘算力不足的压力。网络边缘计算可以部署在多个节点上,包括接入、普通汇聚、重要汇聚、地市核心四级;相应地,物理上存在于基站站点、区县一级机房、地市甚至省或大区的核心机房内[2]。
AGV系统由相应的硬件和软件构成,只要是软件功能,原则上都是可以云化的,但是每个功能模块对实时性要求、与其他模块消息交互的带宽需求不同,故并不是每个模块都适合云化。本文讨论的重点是,分析AGV系统不同模块的特点以及云化对云网的时延、带宽等需求,确定可以进行云化部署的模块;同时,分析确定云及边缘云节点的位置的选择原则。
2 云化AGV业务对云网的需求
AGV系统由AGV小车本体和多机调度系统组成。多机调度系统接收来自MES或WMS的调度指令进行任务分配、路径规划和交通管制。AGV小车执行两点或多点间的搬运任务,实时进行定位导航、安全避障和接受调度台的管制和任务下发、任务变更。AGV本体和多机调度系统(以下简称“调度台”)的功能模块细分,如图1所示。

图1 AGV系统功能模块
2.1 多机调度
多机调度功能主要完成:
(1)任务分配。收到MES或WMS的指令后,选择合适的AGV接收任务,这个时延和带宽要求都不高。和任务的节拍数相关,但实际的项目中一般不会超过每秒1个任务。
(2)路径规划。对于收到任务的起始点选择一条合适的路径,既需要考虑到最高效,也需要考虑到多机之间交通冲突和死锁风险。这个也是和任务数相关。事实上,任务分配并路径规划后才会和AGV本体进行交互。时延小于500 ms,带宽大于100 kBps就可以满足要求。
(3)交通管制。为了防止多车之间发生交通冲突,小车会按一定周期上报位置,调度台不断在计算冲突风险,并给出交通管制指令。各厂家实现机制有点不同,小车上报周期100~500 ms不等。上报和控制指令带宽需求都很小,与小车数量相关,不应大于1 M[3]。
2.2 AGV单机控制
2.2.1 感知采集与控制
这部分包括从摄像头、雷达、IMU、里程计、安全开关等采集实时数据,也包括向电机控制器发送执行控制信息。这部分功能与硬件强关联。一般都驻留在AGV本体,不适合云化部署。
2.2.2 实时分析决策
这部分包括对感知数据的分析、避障、导航定位、运动规划控制。因为感知数据分析是为各项业务功能服务的,提供视觉、雷达、IMU、里程计等数据的智能分析。如果要云化,需要分解到以下主要功能模块的需求分析。
(1)定位建图。以激光SLAM定位建图为例,建图过程可以是在线的,也可以是离线的,对实时性没有强制要求,只需考虑上行带宽。上行数据包括激光点云、IMU、光电编码器等数据。AGV当前以单线为主,一般上行预留10 M带宽即可。
(2)定位导航。AGV在行进过程中,需要不断地对自身为主进行定位计算。定位精度的要求至少3 cm。AGV小车的运行速度为1.0~3.0 m/s不等,以3 m/s计算,这3 cm的误差将会发生在10 ms内。定位导航如果上移到云端,则需要时延高一个数量级,控制在1 ms为佳。带宽需要定位建图,预留10 M带宽。
(3)安全避障。安全避障包括碰触急停和检测到障碍物后停车。涉及安全,故越及时越好。如果需要云化,那么这部分功能所能容忍的时延不能低于定位导航,需要控制在1 ms。
(4)决策控制。运动规划、运动控制,需要在定位、避障感知的基础上,实时地决策和发送控制指令,使得车身前进、后退、转向。故不能低于安全避障功能的要求,姑且定位1 ms。
带宽一般都不是问题,主要需要考虑时延和抖动。
3 基于5G云网的测试数据
网络中的MEC存在多个节点,不同节点的部署会带来不同影响。本研究通过1个试点项目进行了测试。测试通过中国南方某市的1个测试基站到4个MEC层次上的节点的用户面UPF的时延,看不同部署节点带来的时延影响。测试组网如图2所示。
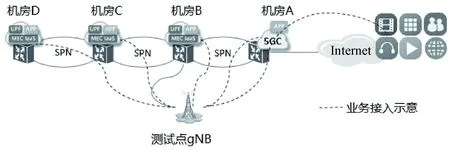
图2 测试组网
分别测试从基站gNB到不同MEC节点的时延,测试数据如图3所示,从中可以看出:用户距离边缘节点上UPF(用户面功能)越远,时延越大;地市MEC/边缘云,基本可控制在20 ms以内。
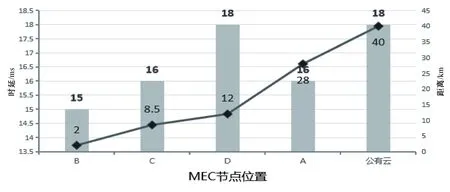
图3 测试点gNB到各层边缘节点的距离与时延示意
另外,上述内容只考虑了基站到MEC上的UPF的时延,但对于业务来说,还需要考虑MEC上UPF到业务服务器的时延的端到端的过程。测试对走不同MEC节点到业务服务器的不同路径做了对比。应用服务器部署在B机房。一条路径是基站到B机房,另一条路径是基站到A机房后到B机房的应用服务器。测试结果,第二条路径多了7 ms。所以,时延要求越低,就要求UPF下沉到最接近业务应用服务器的MEC节点。
同时,也对上下行带宽进行了测试,测试结果显示,在测试点环境下,单用户单线程下行160 Mbps,上行110 Mbps。上下行带宽能满足AGV业务需求。
4 结语
从以上数据和对AGV功能模块的分析看,可以得出3个结论:
(1)多机调度系统、AGV的定位建图功能可以部署在地市一级(不超过50 km)的各级MEC上,都可以满足时延带宽的要求;节点越远,时延越大,受影响因素更多,因条件限制,没有测试。
(2)在条件允许的情况下,将业务部署在越低的节点,越靠近业务发生的园区,时延越低,越有利于业务的可靠开展。
(3)AGV本体的业务功能,如智能感知、导航定位、避障等,因为对实时性要求更苛刻,在当前5G的eMBB网络下,无法满足要求。
5G作为新一代的移动通信技术,契合了工业数字化转型对无线网络的应用需求。5G在工业领域的应用研究处于探索阶段。尤其在超低时延(ms级以下)、高可靠性上,工业场景对网络的要求是非常苛刻的。为此,除了在R16中发布的URLLC、5G TSN,还针对工业场景启动了5G LAN、工业协议感知和增强、高可用方案等5G增强技术的研究[4]。随着这些技术的成熟,包括AGV在内的多种应用,都可以更加灵活地部署计算节点,如进一步云化AGV本体中的智能感知、导航定位等算法,这可以降低本体的成本,共享云端计算资源。
