基于YOLO网络的幼苗分拣系统设计
2022-02-16吴柯锦刘俊安姚建新
吴 超,张 成,吴柯锦,刘俊安,姚建新
(常州机电职业技术学院,江苏 常州 213164)
0 引言
幼苗栽培整理系统技术主要用于提高生产力、统一经营管理,在国内有很大的发展空间。但幼苗盘的搬运和分拣主要由人工完成,降低了农业自动化程度。目前,国内育苗场因标准不统一,幼苗盘的搬运作业机械化程度仍然不高,其整理方式以人力为主,自动化程度低且增加了劳动成本。国外设施农业发达的国家对幼苗的整理装置研究较多,荷兰通过控制农业机器人对幼苗进行逐个整理,但是这些系统复杂、价格昂贵,很难在小规模农企中广泛应用,因而急需一种适合我国国情的机械设备代替人工操作,实现幼苗的快速识别与整理,进而与幼苗盘搬运系统相结合,提高效率,降低劳动成本。
1 分拣系统总体设计
基于YOLO网络的幼苗分拣系统主要包括幼苗根部识别和机械手控制两部分,树苗的根部识别是通过摄像头采集图像,把采集好的图像经过YOLOv5[1]算法检测,得出抓取点位置,提取坐标定位,然后把坐标定位数值,送给机械臂,接着控制M1魔术师机械手[2],运行到相应的幼苗根部上方,抓取幼苗,改变位置。
通过视觉系统图像的采集、YOLO网络检测数据分析,得出苗木的抓取点位姿信息,结合相应算法获取苗木当前状态,将信息传递给机械手[3],机械手根据获取到的位姿信息对苗木的姿态进行调整,得出符合栽培要求的状态。
通过流水线来识别幼苗的根部,通过对其位姿的检测做出相应的反馈到机械手,机械手根据信号对幼苗进行整理以达到理想效果。
分拣系统以越疆科技M1机械臂为主要硬件平台[4],结合机器视觉设计了软件系统并对不同的工件进行了分拣实验验证,在实际的生产中具有较高的理论指导和应用价值。分拣系统总体设计思路如图1所示。
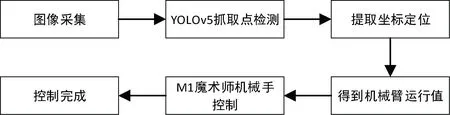
图1 分拣系统总体设计思路
2 定位设计
识别图像中的多个目标和坐标提取是系统对图像进行预处理的目的。摄像头采集到的图像由越疆科技的视觉识别系统完成。
树苗坐标并不能直接作为工件的定位坐标,需要将其从像素坐标系转换到检测的实际定位坐标,坐标转换原理如图2所示。
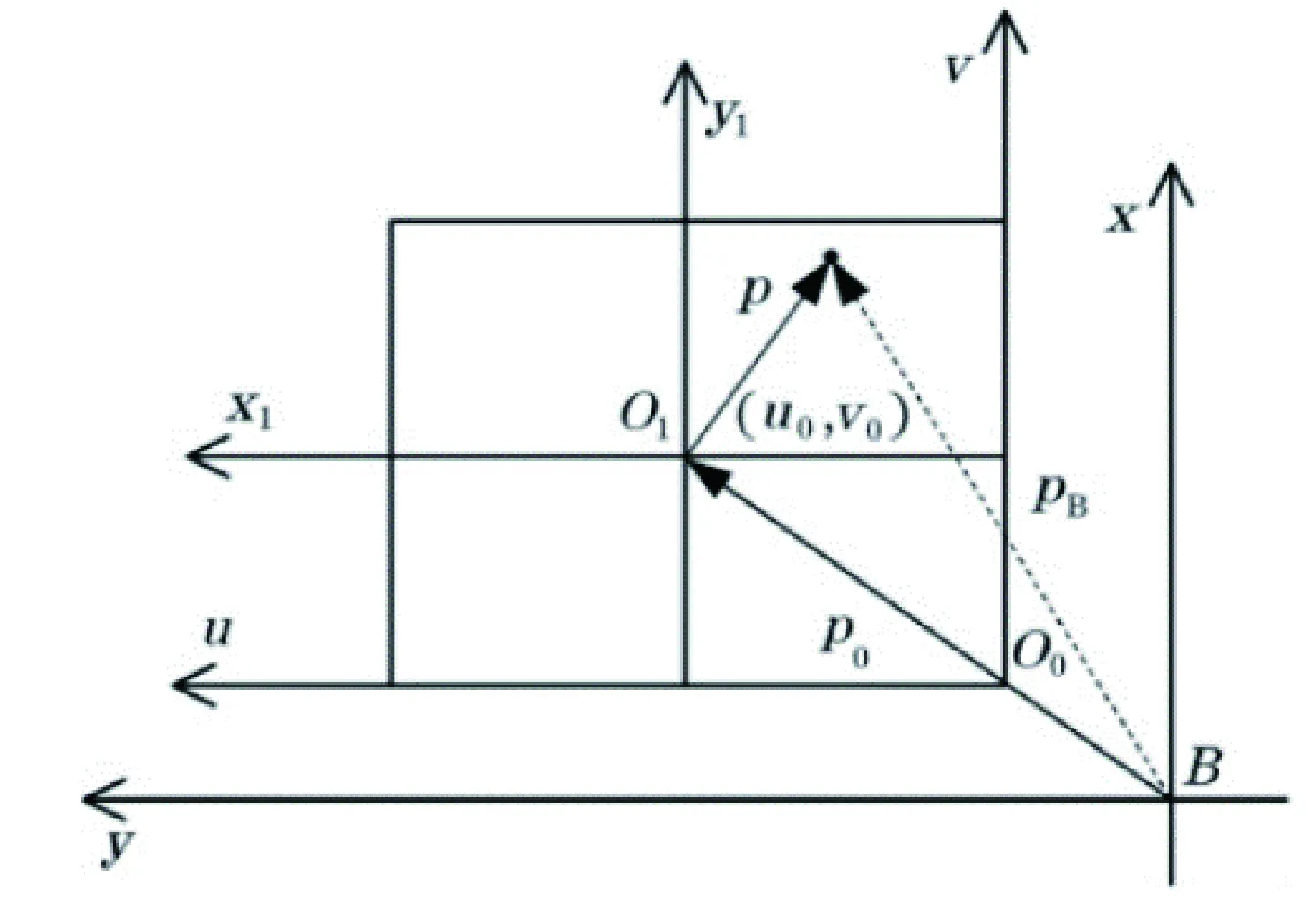
图2 坐标转换原理
系统需要先进行坐标定位,标定出图像在实际定位中的比例,机器人通过通信工作进行抓取处理。
2.1 树苗根部位置定位
机器视觉处理采用DobotVisionStudio。算法平台继承机器视觉软件,首先,在完成树苗分析以后,需要对树苗的位置进行定位,求取树苗根部位置的二值图像。
2.2 YOLOv5算法原理
YOLOv5是一种单阶段目标检测算法,主要包括输入端、基准端、颈部网络端、头部网络端。
(1)输入端:是指模型训练阶段的一些基本方法,包括Mosaic数据增强、自适应锚框计算、自适应图片缩放等。
(2)基准端:主要包括Focus,CSP两种结构。
(3)颈部连接端:在基准网络与输出层之间会有一些参数修改,所以会插入一些层,在YOLOv5中添加了FPN+PAN结构。
(3)头部网络端:锚框机制主要改进的是训练时的损失函数GIOU_Loss以及预测框筛选的DIOU_NUMS。其中,GIOU_Loss GIoU是源自IoU的一种边框预测的损失计算方法,在目标检测等领域,需要对预测边框与实际标注边框进行对比,计算损失。原理如图3所示。
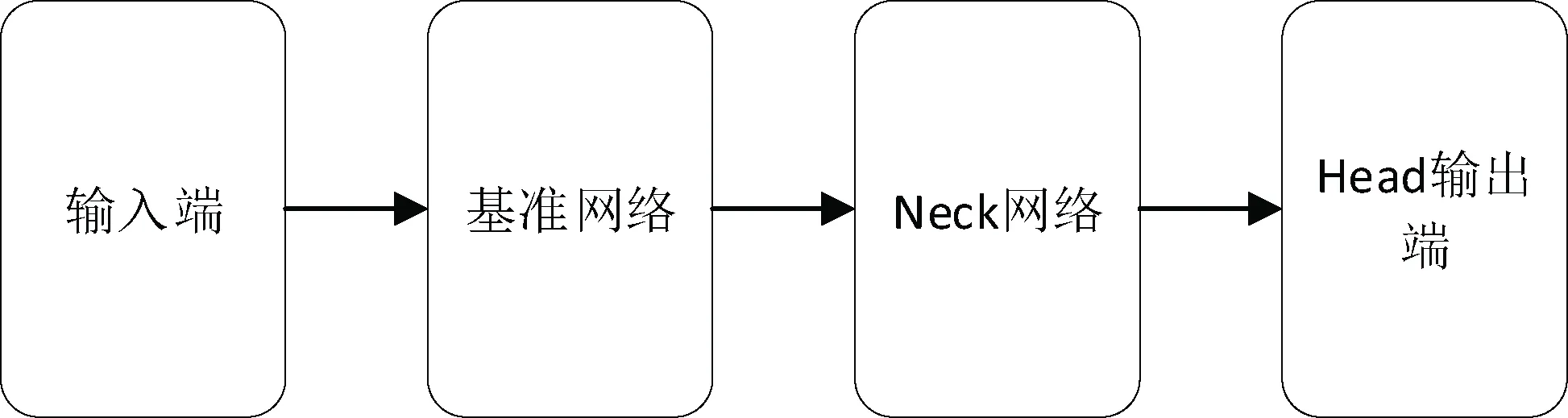
图3 YOLOv5算法原理
在经典的NMS中,得分最高的检测框和其他检测框逐一算出对应的IOU值,并将该值超过NMS threshold的框全部过滤掉。可以看出,在经典NMS算法中,IOU是最重要的因素。
但是在实际应用场景中,当两个不同物体挨得很近时,由于IOU值比较大,往往经过NMS处理后,只剩下对应的检测框,导致漏检的错误情况发生。
基于此,DIOU-NMS不仅考虑IOU,还考虑两个框中心点之间的距离。如果两个框之间的IOU和距离比较大,可能会认为这是两个物体的框而不会被过滤掉。公式如下:
(1)
2.3 YOLOv5目标检测原理
首先输入图像,运用自适应图像缩到规定大小的范围,然后划分网络,分别预测目标边框,预测目标所属类别,经过运算经行置信度评分;其次对阈值进行比较,如果不是特别大的抑制,继续输出目标边界框和标注目标类型以及置信度评分,否则就舍弃边框,YOLOv5目标检测流程如图4所示。
3 机器人抓取流程
机器人抓取程序思路:PC机与相机建立通信联系,传送带传送树苗到指定的拍照位置,视觉处理获取位置,数据传送给机器人,机器人运动到点,然后抓取树枝,调整树枝位置到合适的角度,然后传送带送走树枝。循环执行机器人抓取流程如图5所示。
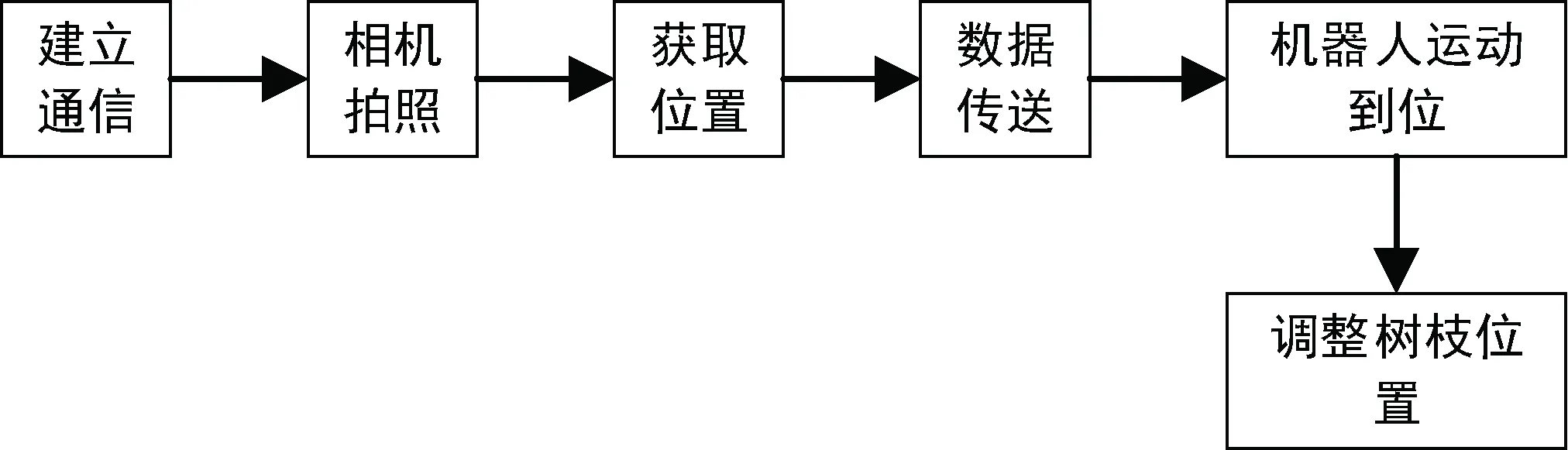
图5 机器人抓取流程
4 结语
目前,农业用的树苗分拣精确识别依旧面临很多问题,如移动平台采集图像成像质量不佳;在阴雨、大雾等气候条件恶劣情况下,容易受烟、雾、不良光照干扰,从而丢失目标纹理细节,对目标部位识别造成困难。以上问题需要对图像进行针对性的预处理,完成图像增强和重建等工作。在实验测试中还发现,传送带在速度较快,多重目标识别情况下漏检、错检概率明显增加,说明在复杂背景下的检测识别能力还有提升空间。
