基于人机协同的医院信息安全技术及系统研发
2022-02-16陈宇斯
陈宇斯
(北海市人民医院,广西 北海 536000)
0 引言
近年来,随着医院信息化技术水平的发展,机器模拟思维凭借更复杂、更准确、更安全的数据安全特征优势[1],被广泛应用于医院信息安全技术系统。首先,人机协同技术在信息处理时采用计算机人工智能与控制端操作人员协同配合的方式,其信息在存储、查阅等过程中准确度高、响应速度快[2]。其次,智能化人机协同技术具备微弱信号放大功能且能高效的获取信息量化指标,能快速、精准地将检测或监管的医院动态感知信息反馈至人机交互界面,辅助操作人员做出精准判断,提升医院信息安全等级和系统功能性[3]。在此基础上,本文通过研究人机协同技术下,医院信息安全系统对目标物动态检测、感知和识别的整体过程和方式,以达到系统控制界面安全、控制系统功能安全、交互算法安全和编程控制安全的目标。
1 人机协同医院信息安全控制系统设计
1.1 人机协同交互医疗信息安全现状分析
目前,智能化人机协同技术逐步在医院信息安全系统中应用铺开,形成了集智能分诊、智能问诊等全过程为一体的人机互助医疗信息安全管理体系。在该信息安全系统中,人机协同的本质是建立操作人员与智能机器间的沟通纽带,以解决复杂问题。有学者提出,在医疗服务过程中,以导纳控制力接触变形模型[4],当变形模型力反馈保持平稳,即实现准确可靠的医疗安全人机协同交互,提高了信息安全系统防护水平。
1.2 人机协同系统模型思维特征
表1对不同阶段内计算思维1.0,2.0和3.0认识特征进行对比分析。通过表1可知,在主体阶段,思维1.0仅为机器视角,而3.0思维则为人机协同的高效、便捷的问题解决能力模式。在核心阶段,思维1.0仅实现了算法与程序相连,尚未将操作人员主观意识加入,而思维3.0通过人机协同将程序、算法相关联,一方面提升了医疗信息安全系统的智能化程度,另一方面多尺度人机协同关联,使信息安全系统工作效率更高、决策服务更出色。
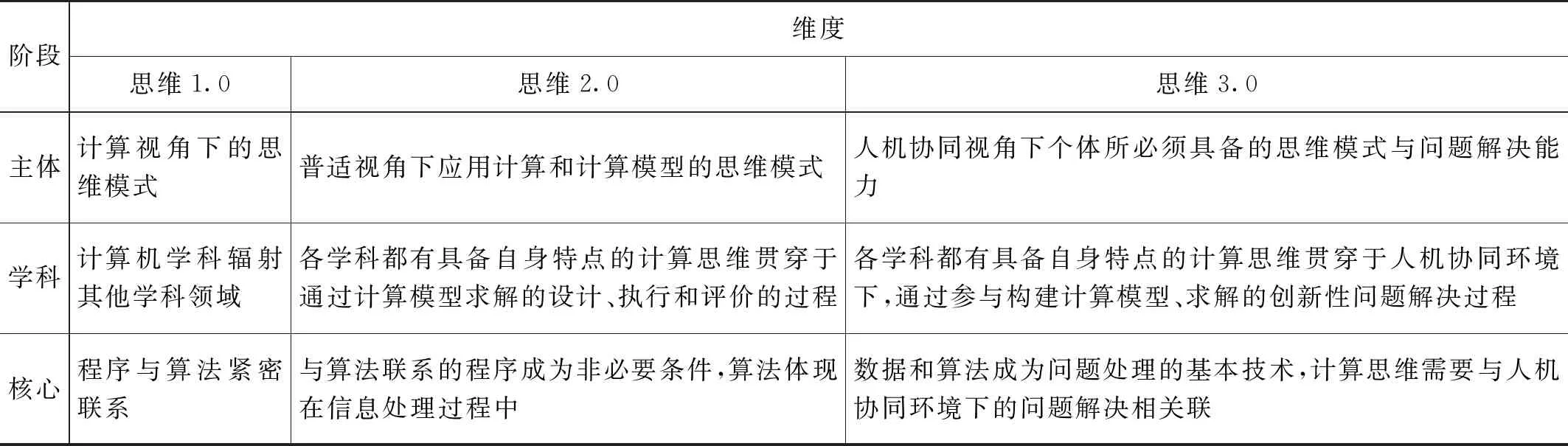
表1 不同阶段内计算思维1.0至3.0认知比较
1.3 人机协同技术系统设计原理
本文主要通过感知识别、控制实现和决策应用3方面科学解释人机协同技术特征原理。从感知识别角度分析,人机协同信息安全技术通过模拟仿真实现对目标对象的感知、推理和智能学习,同时,借助计算机模拟机器学习算法将医院信息安全数据逻辑化、规则化和智能化,强化与系统操作人员的协同合作。从控制实现角度分析,人机协同技术在控制实现过程中,通过导纳控制构建控制适配器,通过在机器系统末端加装种类传感器,将人机协同互动控制在封闭系统中,以此通过控制操作完成对机器的预期目标[5]。相较于前两者,决策应用分析依据计算机智能识别终端和前端传感器数据采集,将医院信息安全数据经模型计算分析后,以图形及公式结论形式辅助技术人员进行决策分析。
1.4 人机协同技术系统架构设计
在人机协同3方面设计原理中,文章基于人机协同技术背景所构建的医院信息安全系统平台架构主要分析输入层、融合层、决策层和应用层的设计功能及特征(见图1)。通过图1可知,信息安全系统输入层将机器设备感知数据经通道上传,在融合层实现短期记忆融合;融合层将通道传感机器传输信息、知识库数据、编码规则和用户意图协同,传输至管理层以决策判定;在应用层内,经用户意图控制命令实现机器人取药、问诊、寻医、消毒等医疗服务过程,同时构建4重保护型架构体系,各层协同配比实现人机协同合作。

图1 基于人机协同的医疗信息安全系统架构
2 人机协同信息安全感知与识别技术研发
2.1 目标物信息安全检测
在医院信息采集、分析过程中,检测的环境相对复杂。为此,通过智能机器学习和人类决策判定协同实现对环境目标物的检测。本文面对医院信息复杂多样的环境,设计上采用实时快速目标检测(yolo)获取检测目标物区域内数据类别、地理坐标等信息,并借助yolo检测识别速度快、背景值误差小的特征,实现医院信息目标物机器识别信息与人为决策信息深度交互。
2.2 目标物信息安全系统感知与识别
医院信息数据采集若仅使用人力收集资源,获取数据信息量小且时效性低。人工智能机器能够通过设备感知目标物信息特征要素,经互联网传输至医院信息安全技术终端识别分析,实现数据的快速识别、判定和采集。通过智能化机器对医院目标物信息感知、识别和人工决策协同配合,在有效提高人和机器设备获取数据的效率和准确性的同时,进一步保障了医院的信息安全,减少了生产服务环节的信息安全隐患。
3 人机协同医院信息安全控制系统实现
3.1 系统控制界面和交互算法实现
3.1.1 控制界面实现
人机协同交互后,医院信息控制界面执行实现工艺流程如图2所示。由图2可知,医院信息数据经人为引导至末端制定串口,通过力矩传感器将电信号(ST Gi)转为力信号,经重力补偿、坐标转化、导纳控制和虚拟夹具控制后,将转化信号传输至机器控制管理中心,形成了一套完整的集成操作人员主导,机器控制工作的内循环医院信息安全技术系统控制管理流程,提高了医院信息安全管理能力和安全性能。

图2 人机协同交互控制界面实现原理
3.1.2 交互算法实现
在人机协同控制管理医院信息安全基础上,本文通过人机协同算法(DFC)实现人机交互协作,在保障信息安全监管效率的同时提升了协同工作效率。交互算法实现如式1—3所示,协同目标函数为Fk,分别对人和机器分配K个子任务,以系数计算压迫程度,自重通过总参数fk表示人机协同任务的满意度,进而以人机协同的交互算法保障医院信息安全系统稳定性、数据应用高效性、时效性。
(1)
(2)
(3)

3.2 控制功能及编程控制实现
在医院信息安全系统设计过程中,编程控制实现占据关键地位。首先,控制编程功能保证了人机交互过程中控制功能的稳定性,决定了医院信息采集、智能问诊系统运行的流畅性;其次,编程控制实现一般通过数学模型(或裙带关系)计算分析,人机协同编程控制则是机器学习通过系统学习模型进行数据分析,保证编码控制系统程序的安全性及稳定性,以协助操作人员决策分析。
4 结语
本文分析了医院信息安全系统在复杂环境下人机协同控制的内容,并测试了人机协同背景下控制界面、控制编程和交互算法的实现路径,最终探索人机协同方式下工作效率、准确性特征,得到以下结论:通过人机协同可以有效实现控制界面、编程控制、传感器的深度交互,使医院信息安全系统功能更为健全可靠、信息数据采集更为便捷高效。人机协同有机连接医院信息安全系统输入层、融合层、决策层,将人工决策分析和机器学习方法相结合,提升了信息安全系统稳定性、时效性和人员决策精度。
