空气流动阻力下非线性车辆队列最优能耗控制方法
2022-02-16闫茂德杜正源
闫茂德, 杜正源, 左 磊
(长安大学 电子与控制工程学院,西安 710064)
0 引言
近年来,智能交通系统受到了社会各界的广泛关注[1-3]。车辆队列作为智能交通系统中的一个重要组成部分,可有效提高道路使用率、降低能源消耗,尤其是当车辆高速行驶时,空气阻力急剧增加,导致车辆大约有50%的燃料消耗需要用于克服空气阻力[4]。因此,研究空气流动阻力下的车辆队列控制方法,对促进智能交通的发展以及降低车辆能量消耗具有重要意义。
在车辆队列控制领域,许多学者针对如何控制车辆来减少能量消耗开展了多方面研究。文献[5-6]通过获得交通信息,结合车辆动力学和经济性能要求,提出了城市路况下车辆行驶控制策略,可有效提升燃油经济性。文献[7]针对时变的多目标控制问题,提出了一种实时权值调整策略,降低了车辆燃油消耗。文献[8]考虑道路坡度对车辆能量消耗的影响,提出一种快速优化的非线性模型预测控制方法。这些研究着重考虑不同因素对能量消耗的影响,提出了相应的解决方案,在一定程度上降低了车辆队列的能量消耗。
然而,上述研究提出的控制方案没有考虑空气流动阻力对车辆队列的差异性影响。当车辆采用队列行驶时,由于车间距离缩短,后车进入前车的尾流区,两辆车的流场发生相互干扰,空气流动阻力的参数会发生变化[9]。文献[10-14]采用风洞试验及数值模拟方法,说明了队列行驶时,每辆车的风阻系数会随车辆间距的变化而发生改变。
为了使车辆队列达到期望车间距,众多先进控制方法被应用于车辆队列控制中,其中滑模控制由于其较强的鲁棒性受到广泛使用。文献[15]针对自适应巡航控制中存在的问题,提出一种自适应滑模控制方法。文献[16]考虑车辆的外部干扰因素,结合扰动观测器提出了一种整体滑模控制策略。文献[17-20]采用耦合滑模面设计自适应滑模控制器,保证了队列稳定性。现有的滑模控制算法能够使车辆队列达到期望的控制效果,但在设计时并未考虑空气流动阻力的车辆动力学模型。
基于以上分析,本文研究空气流动阻力下车辆队列最优能耗控制问题,主要贡献包括:(1)分析空气流动阻力下车辆队列中每辆车的动力学模型及其相互作用关系,建立基于异构风阻系数的非线性车辆动力学模型。(2)通过Lyapunov方法设计了滑模控制器,并证明所设计车辆队列系统的稳定性与可行性。(3)构建稳态下车辆队列的能量消耗评价模型,并通过优化分析的方式,计算稳态下车辆队列能量消耗最优的期望车间距。最后通过数值仿真的手段验证了所提控制方法的有效性与可行性。
1 系统模型与问题描述
1.1 空气流动阻力下车辆队列动力学模型
车辆的尾涡是产生空气阻力的主要原因,队列行驶时由于不同位置车辆的尾涡状况不同,导致其风阻系数不同。图1为车辆队列行驶时不同位置车辆的风阻系数随车辆间距变化曲线[21]。
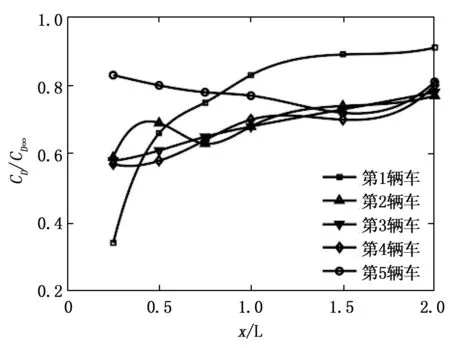
图1 车辆风阻系数随车辆间距变化曲线
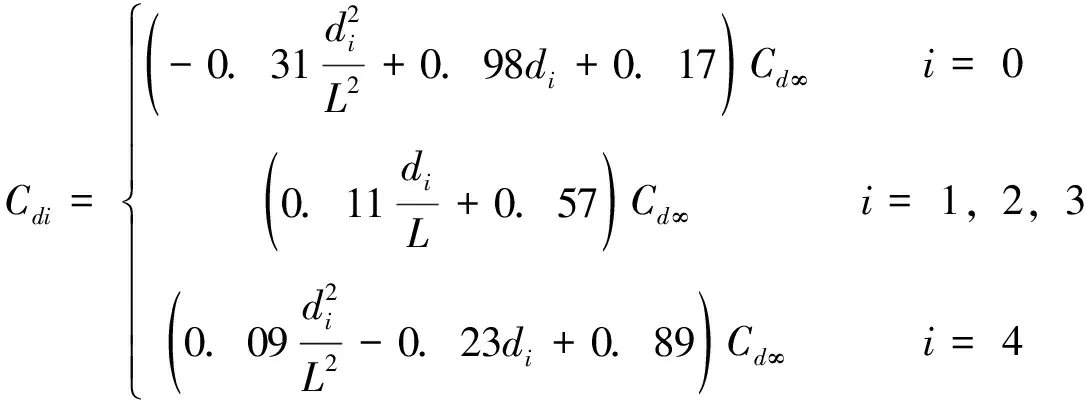
图1中,横坐标为车辆间距与车长的比值,纵坐标为车辆实际风阻系数与单车行驶时风阻系数的比值,不同曲线代表车辆队列中不同位置的车辆。由图1可知,头车和尾车的风阻系数随车辆间距变化趋势与其他车辆不同,因此采用不同的函数进行拟合,具体如下:
Cdi=
(1)
其中:Cdi为队列中第i辆车的实际风阻系数,Cd∞为单车行驶时的风阻系数,di为车辆队列的间距,L为车长。
考虑由N+1辆相同阶背式轿车构成的车辆队列,并标记这些车辆为0,…,N,其中0表示领航车,1,…,N表示跟随车辆,每辆车的动力学模型表示为:
(2)
车辆队列通信拓扑结构及每辆车所受空气阻力情况如图2所示。

图2 车辆队列通信拓扑及空气阻力示意图
图2中,每辆车左前方的箭头表示车辆受到的空气阻力,箭头的数量表示空气阻力的大小。由图2可知,车辆队列行驶时,头车和尾车与其他车辆的风阻系数随车辆间距变化特性不同,导致其所受空气阻力不同,即动力学模型为异构非线性。车辆之间的通信拓扑结构是双向的,所有车辆之间通过无线通信方式(V2V、5G等)共享各自的运动状态信息(如位置、速度等)。
1.2 问题描述
车辆的位置误差ei(t)表示为:
ei(t)=ri-1(t)-ri(t)-L-d*i=1,2,...,N
其中:d*为期望车辆间距。
在此基础上,根据式(2)中的动力学模型,车辆队列的控制目标表述如下:
1)车辆收敛性:车辆队列中每辆车的位置误差及速度误差能够渐进收敛至零,即:
2)队列稳定性:当出现速度波动等扰动时,队列误差不向上游车辆放大传播,即:
其中:▽为拉普拉斯算子,Gi(▽)表示队列误差传递函数,Ei+1(▽)和Ei(▽)分别表示ei+1(t)和ei(t)的拉普拉斯变换。
2 基于滑模的车辆队列控制
在本节,设计基于滑模的非线性车辆队列控制方法,确保车辆的收敛性及队列稳定性。
首先,设计滑模面:
si(t)=cei(t)+e’i(t)i=1,2,...,N
(3)
其中:c>0。
为了保证队列稳定性,构建耦合滑模面:
(4)
其中:0<βi≤1为耦合滑模面的耦合系数。
Si(t)与si(t)的关系可表示为:
S(t)=Bs(t)
其中:

当i=1,2,...,N-1时,对Si(t)求导得:

当i=N时,对SN(t)求导得:

基于以上分析,对第i=1,2,...,N-1辆车设计控制律为:
(5)
对第N辆车设计控制律为:
(6)
其中:ki>0。
定理1:考虑由N辆车组成的车辆队列,其动力学模型由式(2)所描述。则在式(5)~(6)所设计控制律的作用下,其中参数满足c>0,0<βi≤1,ki>0,车辆队列能够稳定地收敛到期望的队列状态。
证明:设计如下Lyapunov函数:
对V(t)求导得:
(7)
将式(7)代入式(8)得:
(8)

对于车辆队列稳定性,通过限定前后车关于位置误差的拉普拉斯变换的比率来保证。具体地,由于Si(t)=βisi(t)-si+1(t),则有:
(9)
对式(9)进行拉普拉斯变换,则有:
βi(sEi(▽)+cEi(▽))=sEi+1(▽)+cEi+1(▽)
(10)
式(10)可变为:
由于βi满足0<βi≤1。可以保证车辆位置误差不会传递,队列稳定性得到保证。
3 稳态下车辆队列能耗优化
在本节,构建了车辆队列能量消耗评价模型,定义了稳态条件,得到稳态下的控制律及能量消耗评价函数,并通过优化分析,计算使车辆队列能量消耗最优的期望车间距。
首先,定义车辆队列能量消耗评价模型:
(11)

在此基础上,稳态下的控制律可表示为:
(12)
其中:i=1,2,...,N-1。
对于最后一辆车:
(13)
对控制律进行化简,当i=1,2,…,N-1时,令:
当i=N时:
将式(12)~(13)代入式(11),得到稳态下车辆队列能量消耗评价模型:
对J(ds)求导得:
Δ=B2-4AC
当参数选择为c>0,0<βi≤1,ki>0时,可得Δ<0,即方程存在三个不相同的实根ds1,ds2,ds3。
定义车辆间最小安全距离为dsafe。当车辆队列间距在[dsafe,2L]范围内时,对于能量消耗影响较大,因此对方程的根进行以下讨论:
情况1:ds1,ds2,ds3∉[dsafe,2L]。
此时,J(ds)在[dsafe,2L]内单调,计算ds分别位于dsafe和2L处的J(ds)值,得到局部最优解。
情况2:∃{ds1,ds2,ds3}∉[dsafe,2L]。
此时,判断出位于[dsafe,2L]中两个根的极小值点,计算ds分别位于dsafe,2L和极小值点处的J(ds)值,得到局部最优解。
情况3:∃{ds1,ds2,ds3}∈[dsafe,2L]。
此时,首先判断出位于[dsafe,2L]中的根是否为极小值点,若该根为极小值点,则计算ds分别位于dsafe,2L和极小值点处的J(ds)值,得到局部最优解;若根不为极小值点,则计算ds分别位于dsafe和2L处的J(ds)值,得到局部最优解。
情况4:ds1,ds2,ds3∈[dsafe,2L]。
此时,判断出ds1,ds2,ds3中的极小值点,计算ds分别位于dsafe,2L和极小值点处的J(ds)值,得到最优解。
4 仿真验证
考虑一组5车队列,包含1辆领航车和4辆跟随车。车辆动力学模型参数如表1所示。
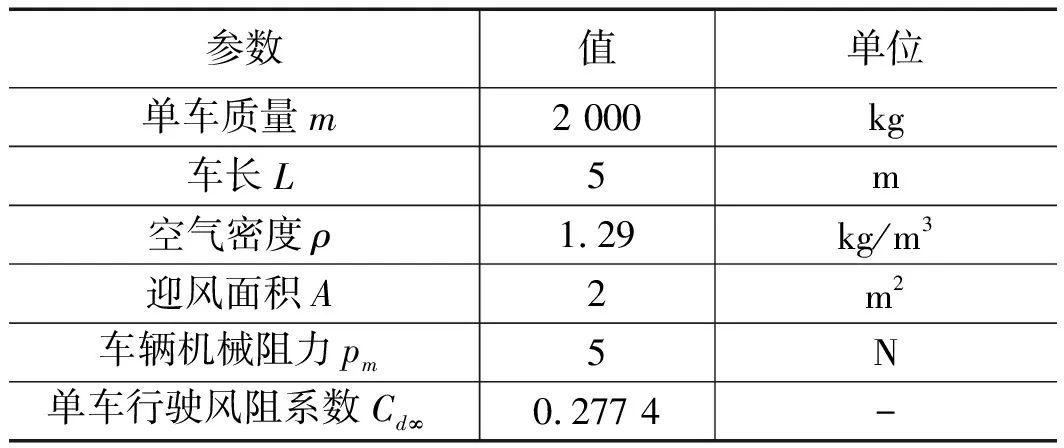
表1 车辆动力学模型参数
车辆队列中每辆车的风阻系数与车辆间距之间的关系如表2所示[21]。
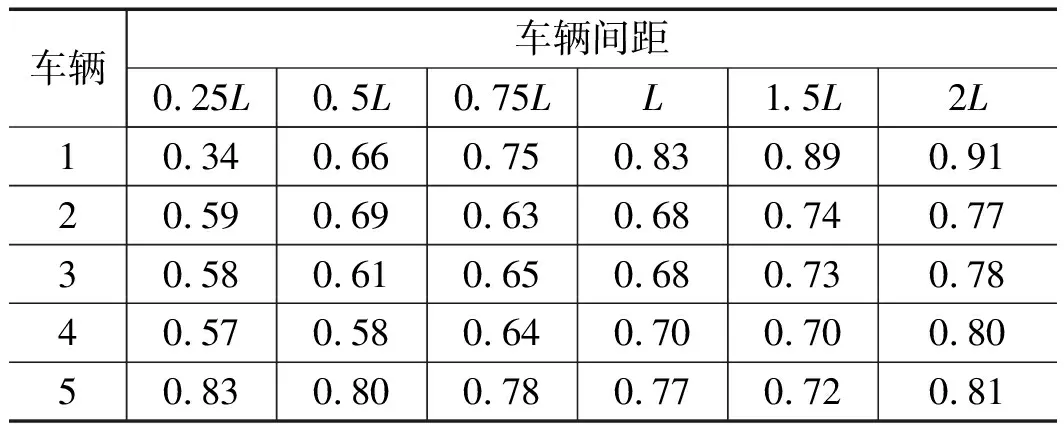
表2 五车队列风阻系数与车辆间距之间的关系
将表2中的数据按照式(1)的形式采用最小二乘法进行拟合,拟合结果为:
设定领航车的初始位置为r0=0,领航车的速度为v0=5 m/s,跟随车辆的初始位置为r(0)=[-18.404,-35.014,-52.853,-66.279]Tm,跟随车辆的初始速度为v(0)=[0,0,0,0]Tm/s。控制器参数为c=0.3,βi=0.85,ki=3。期望车辆间距设置为d*=7 m,最小安全距离为dsafe=2.5 m,稳态位置误差限界为emax=0.05 m。仿真结果如图3~10所示。
图3为车辆位置随时间变化曲线,由图3可知,队列中每辆车最终都能够稳定地跟踪领航车且不会发生碰撞,保证了安全性。图4为车辆位置误差随时间变化曲线,可以看到任意两车之间的位置误差最终都能够收敛至稳态位置误差限界内,表示整个车辆队列最终能够达到期望的车辆间距,队列稳定性能够得到保证。
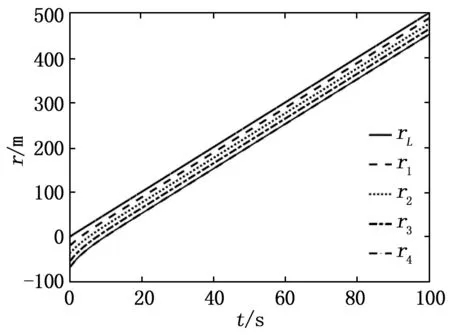
图3 车辆位置曲线
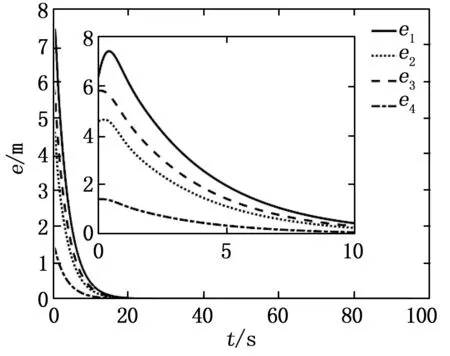
图4 车辆位置误差曲线
图5为车辆速度随时间变化曲线。由图5可知,所有跟随车辆的速度最终能够趋于领航车的速度,保证了车辆稳定性。图6为车辆速度误差随时间变化曲线。由图6可知,任意两车之间的速度误差最终趋于0,即在式(5)~(6)设计的控制律的作用下,整个车辆队列最终会达到稳定,保证了车辆收敛性及队列稳定性。

图5 车辆速度曲线
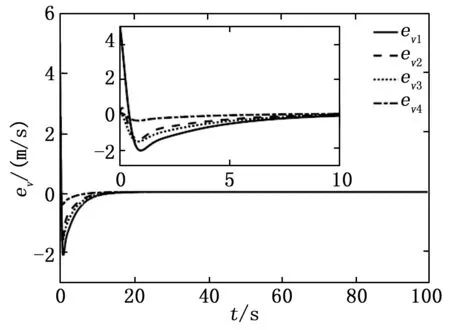
图6 车辆速度误差曲线
图7为滑模面随时间变化曲线。由图7可知,Si(t)能够到达滑模面Si(t)=0,且没有抖振情况出现。图8为车辆控制输入随时间变化曲线。从图8中可以看到车辆的控制输入最终趋于稳定,说明了本文所设计的控制算法的收敛性与可行性。
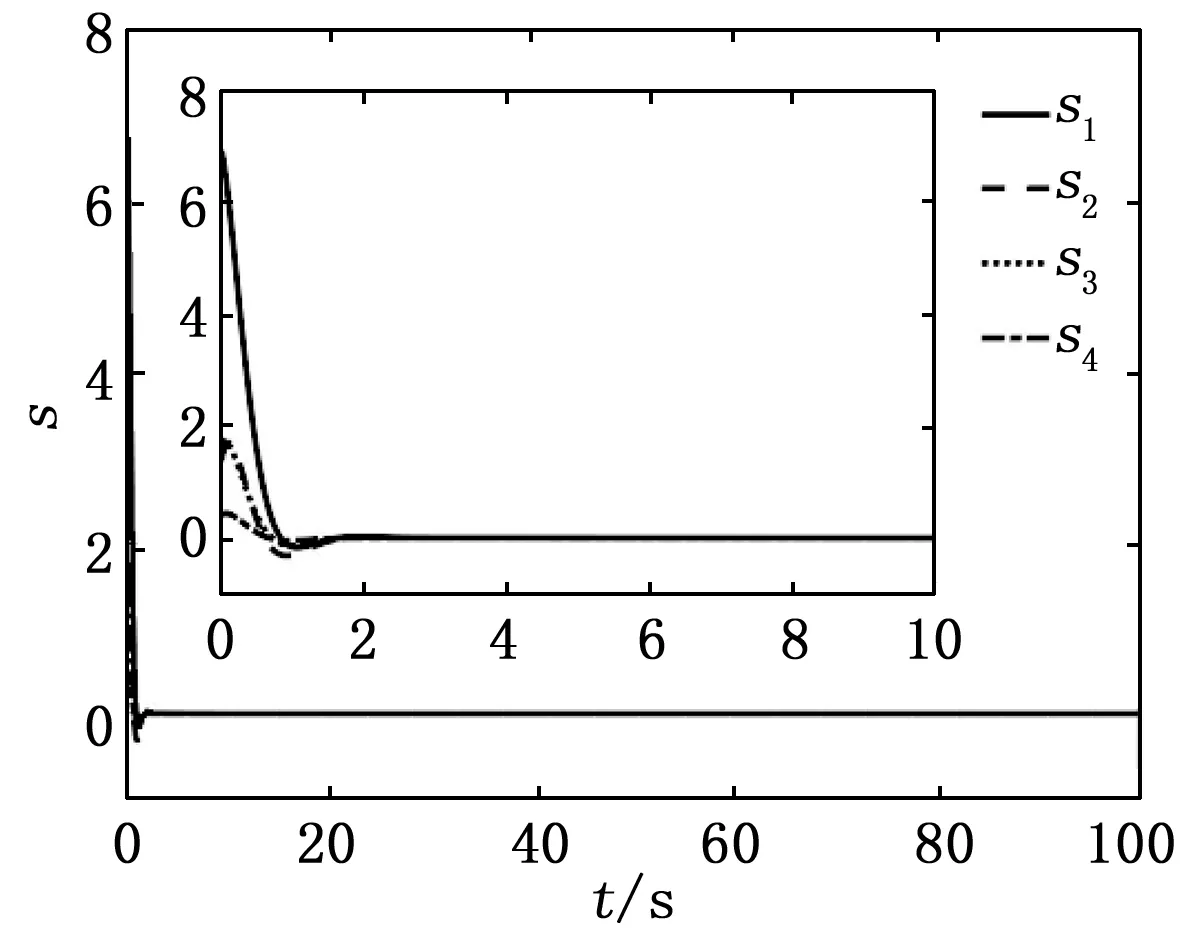
图7 滑模面曲线
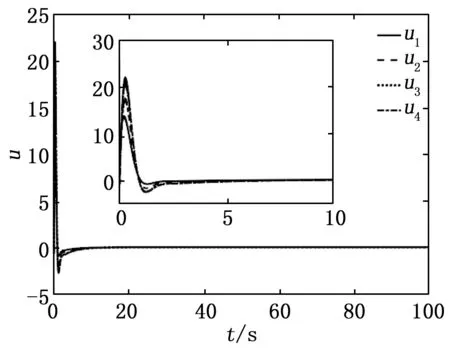
图8 车辆控制输入曲线
基于以上的参数设置,在ds∈[2.5,20]m范围内,能量消耗随稳态车辆间距变化曲线如图9所示。
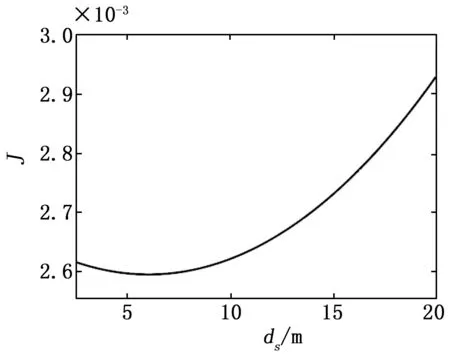
图9 能量消耗函数曲线
其中,横坐标表示稳态间距,纵坐标表示能量消耗量。可以看到,能量消耗函数在ds∈[2.5,20]m内存在极小值,通过求解得到极小值点位于ds=6 m,稳态时位置误差限界为emax=0.05 m,即此时期望间距d*=ds-emax=5.95 m。
不同期望间距下能量消耗对比结果如图10所示。
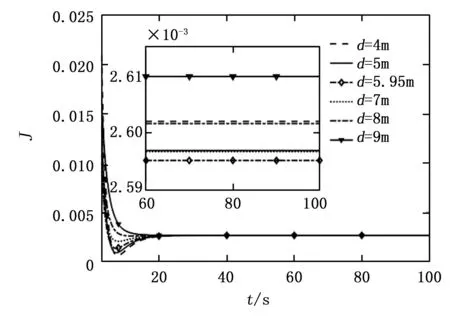
图10 不同期望间距下能量消耗曲线
其中,横坐标为时间,纵坐标为能量消耗量,不同曲线表示不同期望间距下的稳态能量消耗。给出了当期望间距d*分别为4 m、5 m、5.95 m、7 m、8 m、9 m时的能量消耗值。由图10可知,期望间距设置不同时,稳态下的能量消耗也不同。期望间距设为5.95 m时,车辆队列稳态能量消耗降低,与图9得到的结果一致,说明了本文提出的稳态下能量消耗评价函数的有效性。
5 结束语
本文研究了空气流动阻力异构的非线性车辆队列最优能耗控制问题。首先,构建队列行驶车辆的风阻系数随车辆间距变化函数,并建立了基于异构风阻系数的车辆动力学模型。其次,设计基于滑模控制的非线性车辆队列控制方法,利用Lyapunov理论证明了车辆的渐进稳定性,并采用耦合滑模面来保证队列稳定性。在此基础上,定义稳态条件,构建了稳态下车辆队列能量消耗评价模型,并通过优化分析的方式,计算车辆队列能量消耗最优的期望车间距。最后,通过仿真验证了算法的可行性与有效性。
