基于无人机高光谱影像的火龙果波段筛选研究
2022-02-15陈智虎刘春艳许元红
陈智虎,舒 田,刘春艳,许元红
(贵州省农业科技信息研究所,贵州 花溪 550006)
随着科学技术的发展,精准农业越来越受到科研人员的关注,各种先进技术不断被应用于农业生产上,新技术的参与,一方面降低了农业生产成本,提升了病虫害的防控水平;另一方面提高了农作物产量,增加了农民的收入。无人机在喷洒农药、施肥、农作物长势监测等方面发挥了重要作用,张海艳等[1]利用旋翼无人机进行农药喷施试验研究,根据旋翼风场不同,单旋翼植保无人机喷施效果优于多旋翼植保无人机;赵莲英[2]通过植保无人机喷施纳米农药,研究水稻主要病虫害防治效果。根据研究的需要,无人机可以搭载不同的作业平台采集不同的数据,以此来进行相关研究,如高光谱数据、多光谱数据、热成像数据以及其他相关数据。陶惠林等[3]通过分析高光谱遥感数据植被指数和红边参数与冬小麦生物量的相关性,建立相关模型并进行验证;陈晓凯等[4]利用低空无人机获取的高光谱影像对冬小麦叶面积指数进行遥感估算,表明基于森林回归算法的无人机高光谱叶面积指数估算模型能够准确地实现小区域的叶面积指数遥感填图;基于多光谱遥感影像进行冬小麦叶绿素含量反演及监测研究[5]、小麦长势监测研究[6]、烤烟株高研究[7]、番茄冠层SPAD 预测研究[8]、新疆棉田螨害大范围监测研究[9]、水稻叶绿素含量反演及监测研究[10]、蛇龙珠葡萄成熟度判别研究[11]等,基于红外热成像的林地余火死灰复燃点诊断方法研究[12];王娇娇等[13]以高光谱图像为基础,利用高斯回归分析方法进行水稻氮素敏感波段筛选及含量估算;Wang 等[14]以高光谱图像为基础,利用小波支持向量机集成模型和膜鲸优化算法进行波段选择,均取得了较好的研究成果[15-22]。
高光谱影像数据具有大量的波段信息,且这些信息对于地物判读、作物识别、病虫害监测等工作不仅能够节约人力物力,还能提高效率和精度,但卫星高光谱遥感图像价格昂贵、数据处理复杂、分辨率低。无人机能够搭载成像光谱仪获取小范围的分辨率较高的高光谱影像,以此来满足研究的需要。赵庆展等[23]利用旋翼无人机搭载多光谱传感器获取多光谱影像资料,通过对多光谱影像数据标准差及相关性进行分析,结合OIF 方法筛选出最佳波段组合;邓小玲等[24]探索通过利用无人机高光谱遥感技术检测柑橘患病的植株,采取人工田间调查方法判断其患病种类和患病程度,该方法主要是基于特征波长进行建模,模型在患病样本分类中表现出很高的准确率。以上研究均展示了无人机高光谱遥感的应用潜力,开展无人机高光谱遥感技术研究势在必行。
1 数据获取与预处理
1.1 研究区概况
关岭布依族苗族自治县(以下简称关岭县)位于贵州省中部,隶属于安顺市,地势西高东低,地形起伏大,植物种类繁多,岩溶发育显著,各种溶洞、暗河、洼地等地貌形态随处可见,是典型的喀斯特山区(图1)。选择关岭县上关镇作为研究区,通过无人机获取高光谱遥感图像,为研究火龙果(Hylocereus undatus‘Foo-Lon’)以及其他农作物的生长特性及不同生长期的光谱差异奠定基础。

图1 研究区位置
1.2 高光谱数据采集系统
高光谱数据采集系统由无人机平台和高光谱传感器组合而成。无人机平台采用大疆M600 型旋翼无人机,该无人机有效载荷7 kg,最大起重量15.1 kg,续航时间20 min。在无风状态下,飞行速度可达18 m/s,飞行限高2 500 m,利用大疆Altizure 软件进行航线规划,由无人机按照规定航线进行自主飞行。
高光谱传感器采用的是美国生产的PikaXC2 高光谱成像仪,适合在中小型无人机上搭载,光谱范围400~100 nm,光谱分辨率1.3 nm,光谱通道数有231个,重量2.2 kg,镜头焦距采用17 mm。
1.3 数据获取与预处理
研究区选择在关岭县上关镇乐安村火龙果种植示范园区,根据高光谱成像的特点以及无人机飞行的需要,数据采集时间为2018年9月18日11:00-15:00之间。目标区域长400 m,宽400 m,行高100 m,航向重叠率为65%,旁向重叠度65%,设置4 条航线,预计飞行时间20 min。试验区内设置两块1.8 m×2.0 m 的浅灰色靶标布作为参照。在试验区内道路交叉点、房屋拐角等地采集了6 个地面控制点,控制点均匀分布在试验区内,作为高光谱影像校正的参考。
使用ArcGIS 和ENVI 软件进行高光谱影像校正和拼接处理,处理过程中首先利用ArcGIS 软件通过地面控制点数据对影像进行校正,得到独立的多幅高光谱影像;其次,运用ENVI 软件将独立的高光谱影像拼接得到研究区高光谱影像。由于航拍数据边缘存在模糊或者拉花的现象,从处理后的高光谱影像中选择200 m×200 m 区域(区域A)进行最佳波段组合的研究。研究区内地物界限明显,主要分为园地、建筑物、道路及林地4 类。高光谱数据采集系统火龙果最佳波段组合选择的技术路线如图2 所示。
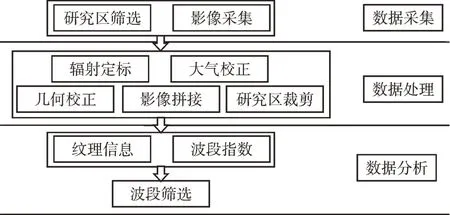
图2 技术路线
2 波段筛选
高光谱影像具有波段数量多、信息量大等特点,根据研究对象的不同选择不同的波段数据进行分析研究。高光谱影像波段数量多带来的困扰就是数据冗余度大,针对不同的研究对象进行挑选。波段的选择应该满足波段之间相关性小、信息量大、波段组合具有较大的光谱差异3 个基本特点[10]。PikaXC2传感器波长及波段见表1。
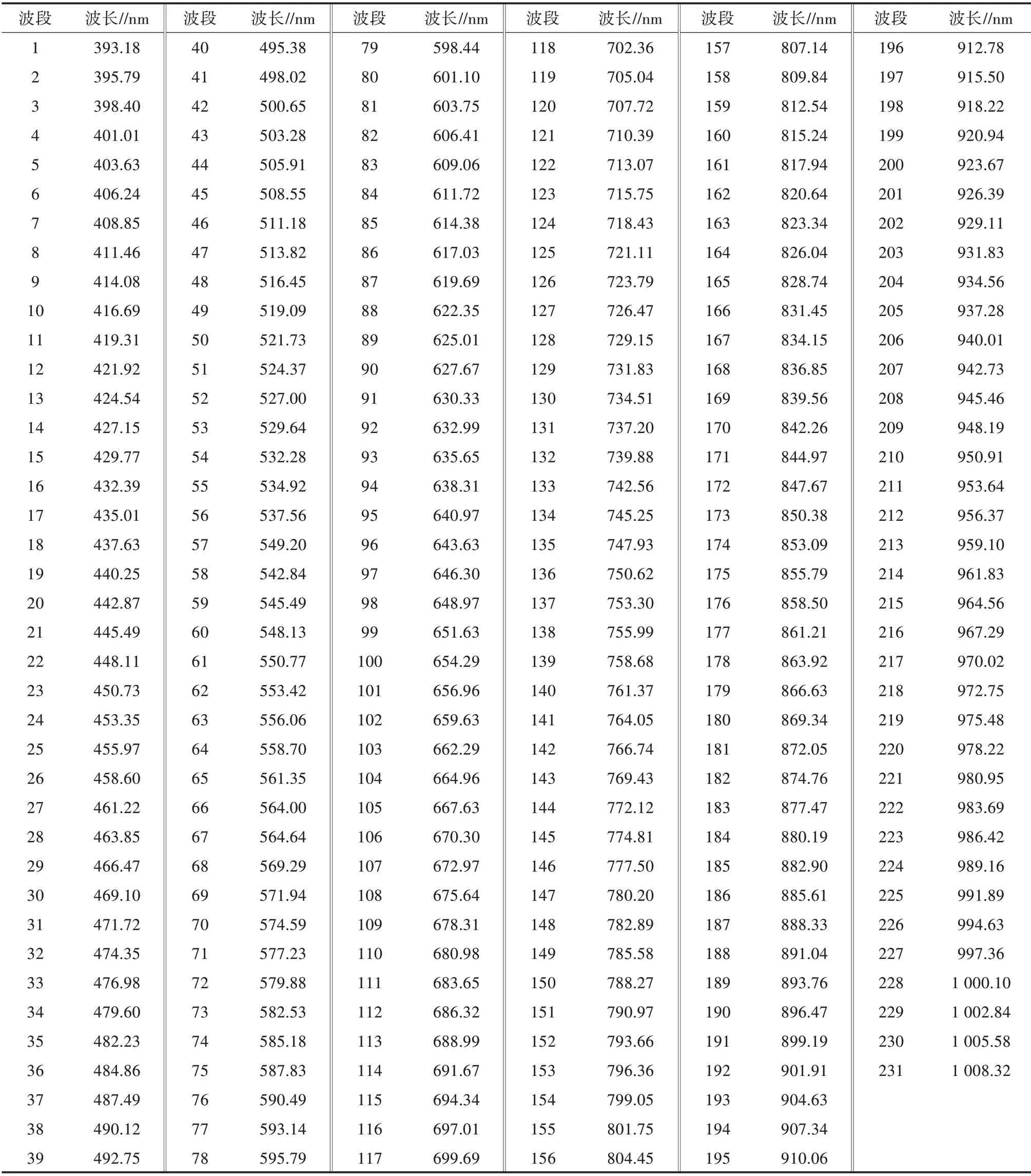
表1 PikaXC2 传感器波长及波段
2.1 原始波段预筛选
通过分析高光谱影像各个波段之间的相关系数以及每个波段的标准差,能够初步筛选出具有信息量大、相关性小的波段。其中信息量大的波段通过分析波段自身像元的标准差来获取,标准差反映一个数据的离散程度,标准差越大表示波段的信息量越大。波段之间的相关系数可以反映多个波段之间的关系密切程度,相关系数越大表示波段之间重叠度大,数据冗余度大;相关系数越小表示波段之间重叠度小,数据冗余度小。以区域A 为例,首先对高光谱影像进行统计,分析各个波段之间的相关性和标准差,挑选出符合试验要求的波段。
相关系数和标准差计算公式分别如下[10]:
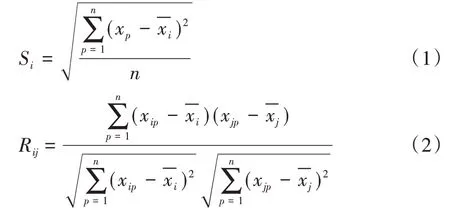
式中,n—像元总个数;p—像元序号;xp—p像元灰度—波段i灰度平均值—波段j灰度平均值;xip—波段i中第p像元灰度;xjp—波段j中第p像元灰度。
对研究区域进行统计分析,得到研究区所有波段的标准差,如图3 所示。各波段标准差可见光到近红外区域整体逐渐上升,部分波段有所降低,在波长782.89 nm 处达到最大值2 585.91,波长667.63 nm到718.43 nm 之间出现缓慢下降的现象,然后从波长721.11 nm 的1 097.68 继续上升到 波长747.93 nm 的2 367.36,在可见光到近红外波段之间进行筛选和分析,剔除波长大于1 000 的波段,以及波段标准差小于1 000 的波段,筛选得到符合要求的波段196 个。
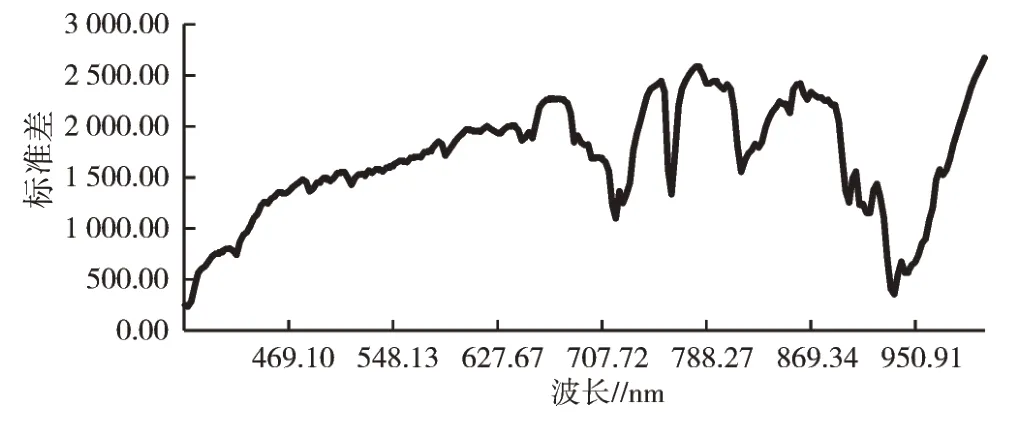
图3 标准差分布
2.2 相关系数分析
将筛选出来的波段进行相关系数分析,相关系数结果如表2 所示。第一行为各波段,各列为与该波段相关系数由大到小的排列,越往下,相关系数越小,波段选择的时候越要考虑,将相关系数在0.5 以下的筛选出来,共计筛选出185 个波段,筛选出来的波段相关系数的分布呈现中间高、两边低的特点。在可见光区域呈上升趋势,相关系数均值在0.45~1.21 区间,在近红外波段呈下降趋势,相关系数均值在0.36~0.46 区间,可见光波段相关系数均值均大于近红外波段内部之间的均值。
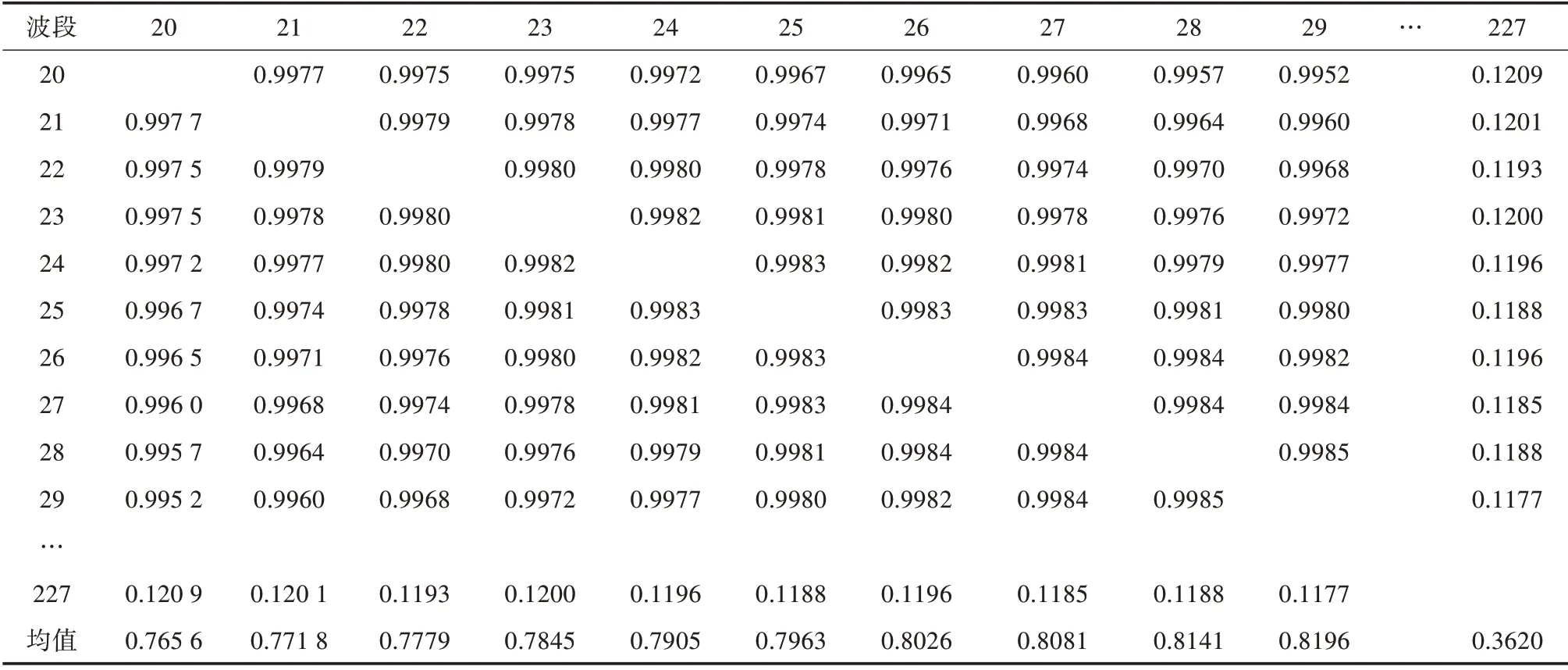
表2 波段间相关系数
3 结论
1)利用无人机搭载高光谱传感器进行航拍,获得了高分辨率、时效性较好的高光谱影像,影像个波段标准差可见光到近红外区域整体逐渐上升,部分波段有所降低,同时也表明可见光到近红外波段所含信息量逐渐上升,在波长395.79 nm 处信息量最小,在波长782.89 nm 处信息量最大,在波长670.30、755.99、782.89、863.92 nm 等处信息量有明显的峰值。
2)在可见光和近红外之间进行波段筛选,剔除波长标准差大于1 000 的波段,以及信息量较小的波段,筛选出196 个符合要求的波段。
3)利用波段标准差筛选出来的波段进行波段间相关性分析,波段间相关系数越小,波段独立性越好,波段间数据冗余度越低,波段筛选越要考虑,将波段间相关系数小于0.5 的进行筛选,得到185 个波段,波段相关系数的分布呈中间高、两边低的特点。在可见光区域呈上升趋势,相关系数均值在0.45~1.21 区间,在近红外波段呈下降趋势,相关系数均值在0.36~0.46 区间,可见光波段相关系数均值均大于近红外波段内部之间的均值。
