城际铁路小断面盾构单线隧道接触网悬挂方案研究与应用
2022-02-15王爱竟
王爱竟
(中铁工程设计咨询集团有限公司,北京 100055)
1 概述
近年来,广东省珠三角城市轨道交通飞速发展,陆续建成多条城际铁路。莞惠城际铁路采用了内径仅7.7 m的小断面盾构隧道,该隧道是国内首次采用的内径最小的城际铁路单线盾构隧道,其断面如图1所示。隧道轨面以上净空高度设计值为6 450 mm。受盾构机开挖过程中上下浮动、左右偏移引起的施工误差影响,盾构隧道在各个方向均有可能出现150 mm的偏差。这将进一步压低轨面以上净空,困难情况下净空高度仅有6 300 mm,因此,接触网安装条件极其受限[1]。
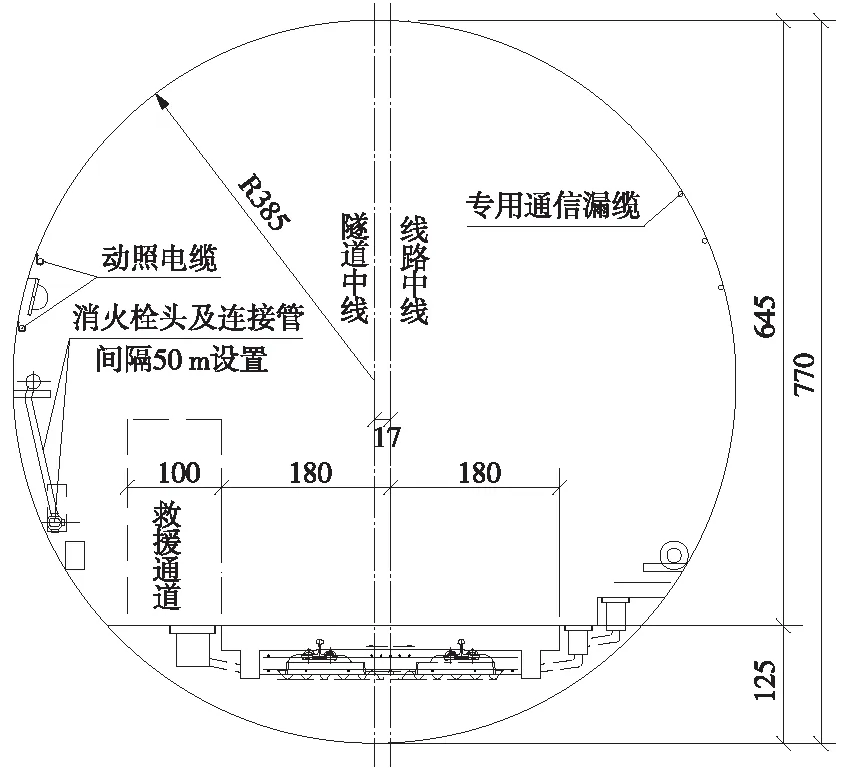
图1 内径7.7 m单线盾构隧道断面(单位:cm)
牵引供电系统采用27.5 kV交流供电制式,接触网采用简单弹性链型悬挂。内径7.7 m单线盾构隧道内满足最大行车速度160 km/h的动车组运行,接触网悬挂安装方案尚属国内首次遇到。既有接触网腕臂支撑装置及悬挂方案无法全面满足安装需求,鉴于此,需结合隧道、线路等相关专业情况,针对各种工况条件研究制定安全可靠的接触网悬挂方案,并研制新型腕臂支撑装置,实现小断面盾构隧道内160 km/h行车速度要求时的接触网悬挂安装。
2 单线隧道传统接触网悬挂方案
本世纪以来,盾构法隧道已经成为我国城市地铁隧道的主要施工工法,地铁盾构隧道内架空悬挂接触网均采用刚性悬挂。盾构隧道早期在国铁项目上应用的极少,随着国内盾构技术的发展,近十年来在国铁及城际铁路中其应用才逐渐增多,因此工程设计阶段接触网安装可借鉴工程经验很少。20世纪90年代西康铁路秦岭特长隧道在国铁上首次采用了单线盾构隧道,该隧道圆形断面内径为7.7 m,轨面以上净空高度6.6 m,接触网采用了水平悬挂安装方式,列车行驶速度120 km/h。2007年开始施工的广深港高铁狮子洋双洞单线盾构隧道内径为9.8 m,轨面以上净空高度8.16 m[2],接触网采用整体腕臂进行悬挂,动车运行速度250 km/h。其他类型单线隧道的接触网悬挂方案也同时可借鉴,马蹄形断面等各类满足隧限2A的单线隧道接触网主要采用水平悬挂及弓形腕臂[3]。综上,研究上述各种方案在内径7.7 m盾构隧道内的适用性,见表1。
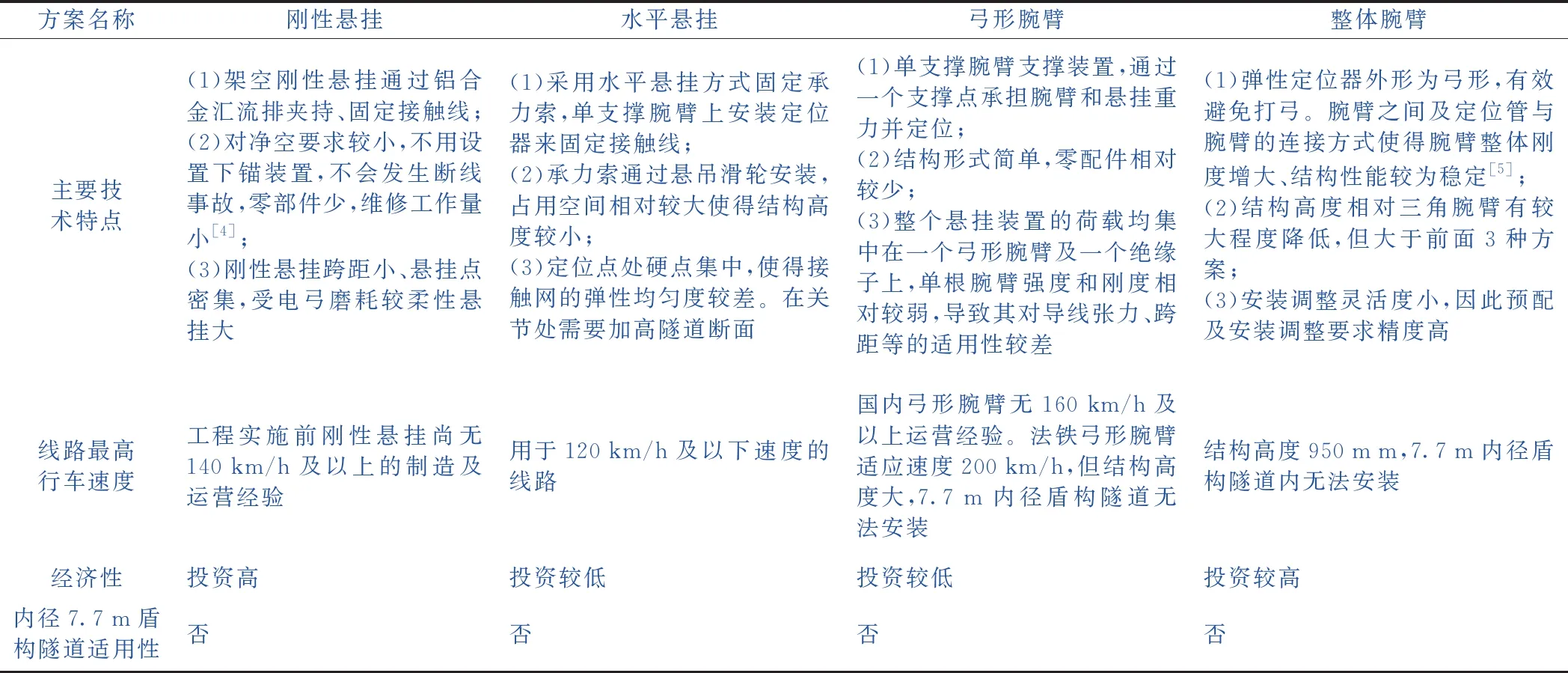
表1 单线隧道传统接触网悬挂方案
通过表1对各类传统型悬挂方案主要技术特点以及对项目的适用性分析可以看出,以往常用的盾构隧道及其他各种类型单线隧道接触网简单链型悬挂方案均无法全面满足项目的各项需求。
3 盾构隧道接触网悬挂方案研究
3.1 总体思路
盾构隧道接触网悬挂方案研究首先基于既有成功安装运营的方案进行分析,优先选用成熟可靠的产品及方案。经充分调研及研究,表1传统悬挂方案无法满足项目安装要求。因此,需结合内径7.7 m盾构隧道的特点,充分利用空间,研制新型腕臂支撑装置及悬挂方案,实现接触悬挂的可靠安装,并能够适应160 km/h的行车速度。研究的重点是新型腕臂结构型式的确定、腕臂与受电弓尺寸、接触网张力及跨距等系统相关参数的匹配性研究、锚段关节及下锚安装等。
腕臂支撑装置作为接触网系统的重要支持装置,为列车的安全运营提供了重要保障,其工作性能直接影响接触网系统的稳定性与可靠性[6-8],研发时需考虑技术、施工、运营等相关因素的要求,如表2所示。
(1)以表2中所述需求因素为指导,以功能需求为出发点,从技术合理性、经济性、美观性综合考虑,研制一种新型腕臂支撑装置[9-10]。
(2)采用集约化设计理念,突破传统腕臂结构形式和组合方式,改变传统的螺栓连接方式为焊接方式,最大程度减少零部件数量和种类,既能减少安装空间,又能实现新型腕臂的简统化。
(3)整套接触网悬挂装置应采用成熟可靠的产品或技术、减少新零件的研发时间,确保工程进度。
(4)结合盾构隧道断面特点、现场施工误差、线路条件及接触网性能需求等,同步制定盾构隧道内的接触网系统悬挂方案。
3.2 主要技术参数的确定
结合160 km/h的行车速度及导线规格,接触线及承利索的张力组合为15 kN+15 kN。轨道采用无砟轨道,悬挂点处接触线距离轨面高度为5 300 mm。轨面以上净空高度一般为6 450 mm,负误差时最低净空高度为6 300 mm,腕臂结构高度=6 300-5 300-300-A=700-A(考虑各种偏差及余量),所以结构高度可定为600 mm。
导线张力及腕臂结构高度确定后,根据最短吊弦400 mm的要求计算跨距,最大跨距不宜超过35 m。结合隧道圆形断面尺寸及综合管线布置情况,根据环境及导线工作温度、补偿方式等相关因素计算确定坠砣行程,确定锚段长度。主要技术参数确定后,接下来研究确定具体的腕臂安装方案。
3.3 腕臂安装方案
3.3.1 反定位安装
反定位安装方式如图2所示,腕臂装置由平、斜腕臂及其之间的焊接板组成,结构形式紧凑,可适应较小的侧面限界,吊柱安装最小侧面限界可至1 500 mm。定位器支座可装于上腕臂,也可以将下腕臂伸长将定位器支柱安装于下腕臂。腕臂的结构高度(悬挂点处承力索与接触线的垂直距离)可在500~800 mm变化,上、下腕臂底座间距也可在350~600 mm范围内调整,具体安装方案可视净空及线路条件确定。

图2 腕臂反定位处安装方案(单位:mm)
3.3.2 正定位安装
为适应盾构断面特性,对于正定位腕臂结构,为了同时便于定位器和腕臂底座的安装,将2个腕臂均做成弯管形式,如图3所示。正定位时,吊柱侧面限界较反定位增加,一般侧面限界需达到2.0 m以上。相对反定位安装侧面限界增加后可加大上下腕臂底座间距,使整个结构受力更合理,下腕臂底座间距也可在600~900 mm内调整。承力索座可装于上腕臂也可以装于下腕臂,结构高度可在500~800 mm变化。
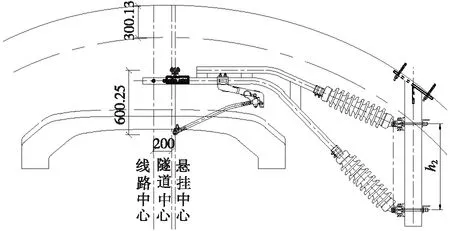
图3 腕臂正定位处安装方案(单位:mm)
为保证受电弓极限位置时与腕臂的安全距离,并适应于各种外轨超高条件下的安装,腕臂长度及弯管角度可灵活设计。同时,为保证腕臂结构强度及刚性,在平斜腕臂管间增加焊接钢板,降低腕臂结构局部受力,减小腕臂结构挠度变形。
3.3.3 新型腕臂特点
新型腕臂结构仅采用2个腕臂管通过连接板焊接,结构形式极为简洁,极大地节省了安装空间,结构高度视净空高度可为500~800 mm,困难情况下最小可至450 mm,这是传统三角腕臂及整体腕臂均无法实现的。传统的三角腕臂存在数量较多的螺栓连接件[11],与其相比新型腕臂取消了定位管1根、支撑管2根、定位环3个、螺栓连接5处等多种连接零部件。
新型腕臂装置基于简约化设计理念,采用整体焊接结构,减少零件和紧固件数量的同时,提升了防松性能[12]。因此,新型腕臂安全可靠性更高、便于运营检修,且节约了经济成本。新型腕臂结构简洁、强度及刚度满足各项要求,尤其对低净空隧道有较强的适用性。
3.4 接触网悬挂方案主要设计原则
基于内径7.7 m盾构隧道的具体特点,并结合线路、轨道等多方面因素,进一步研究确定了更为系统的接触网悬挂方案,主要设计原则如下。
(1)中间柱安装。盾构隧道内线路中心与隧道中心按照设计存在170 mm的偏距,在直线及外轨超高较小的情况下,有2种方案可供选择:一是考虑将腕臂装置均设于安装空间较大的一侧时采用正、反定位交替安装方式;另外,也可全部采用正定位,相邻吊柱换边安装。在外轨超高较大时,采用曲外正定位安装方式。
(2)锚段关节。盾构隧道断面在接触网锚段关节、下锚等特殊工点处无法加高、加宽。接触网锚段关节处采取了非工作支承力索在新型腕臂结构上不抬高安装的方案。
(3)接触悬挂下锚。下锚补偿装置采用棘轮更有利于充分利用空间;因转换柱处非支承力索与工支承力索等高,采用锚段关节转换柱处两支悬挂均为开口安装的方案,避免两支承力索产生交叉互摩,接触悬挂在线路的异侧下锚。
4 仿真计算
近年来在计算机编程方面,由于有限元法具有通用性特点,它已经成为解决各种问题的强有力和灵活通用的工具[13]。本文采用有限元分析方法和软件进行仿真计算,通过建立新型腕臂的有限元模型,对其进行静力分析,求出最大工作载荷情况下的位移和应力,并根据结果进行分析。以结构高度600 mm的腕臂结构为例进行分析,按照TB/T 2075《电气化铁路接触网零部件技术条件》的相关要求对模型加载。承力索座处水平荷载3.5 kN,垂直荷载4.0 kN,定位器底座处水平荷载4.0 kN。另外,按照最大工作荷载的1.5倍对模型加载,校验腕臂的应力水平[14]。
4.1 腕臂受力强度分析
通过对新型腕臂结构进行受力强度分析,研究确定腕臂系统受力集中部位,在结构设计及加工过程中重点进行加强及工艺控制。
正定位腕臂支撑装置计算模型如图4所示,通过对腕臂进行结构力学分析可见,腕臂结构应力集中部位处于腕臂与竖向钢板连接点附近。其最大应力值为103.6 MPa,位于承力索所在下部腕臂管座附近的悬臂处。由于为钢腕臂结构,其许用应力为210 MPa,该处最大应力小于材料容许应力,强度满足设计要求[15]。
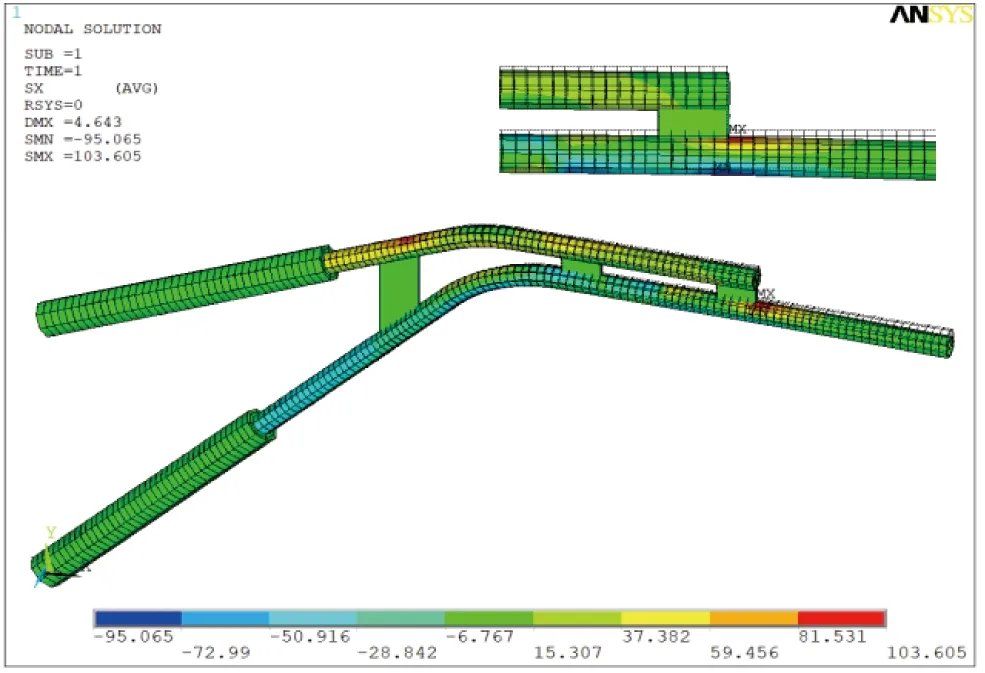
图4 正定位腕臂应力云图
反定位腕臂支撑装置计算模型如图5所示,反定位腕臂应力集中部位主要也是位于平斜腕臂与竖向钢板连接点附近。其最大应力值为122.35 MPa,同时可以看出最大应力点的位置处于承力索座所在的上部腕臂管悬臂处。最大应力小于材料许用应力,通过分析可判断该型式的腕臂结构强度也满足设计要求。

图5 反定位腕臂应力云图
4.2 腕臂挠度变形分析
结构的挠度变形是衡量结构整体刚度的重要指标,根据TB/T 2075的要求,腕臂支撑装置在施加的最大工作荷载下,各部分挠度≯0.7L%(L为腕臂支撑装置部件受力支点间的最大长度)。
图6和图7分别为新型腕臂结构在施加荷载后的挠度分布情况。正定位腕臂最大变形位于下方腕臂的端部,该处最大位移为3.3 mm,小于挠度限值15.6 mm;反定位腕臂最大变形位于上方腕臂的端部,该处最大位移为4.0 mm,小于挠度限制18.2 mm。腕臂系统中的平腕臂和斜腕臂位移远小于标准值,完全符合要求。

图6 正定位腕臂挠度云图
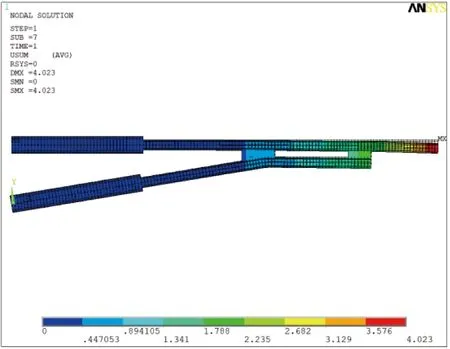
图7 反定位腕臂挠度云图
通过腕臂有限元仿真计算分析可见,新型腕臂在力学性能、挠度变形等方面均可满足相关规程规范及工程应用要求。除了上述理论仿真计算,还在产品检验监督中心接触网零部件检验站根据TB/T 2073规定的检验规则和方法对腕臂进行了整体静力学试验,试验结果同样满足TB/T 2075关于腕臂支撑装置性能的有关要求。
5 结语
通过对内径7.7 m小断面盾构隧道接触网悬挂方案的研究,实现了接触网在盾构隧道内各种线路曲线半径、各种外轨超高以及各种施工误差情况下的安装,解决了传统悬挂方案适用速度目标值有限或无法安装的问题,为内径7.7 m的小断面盾构隧道在城际铁路中首次应用提供了技术前提和保障。
研制的新型腕臂支撑装置形式极为简洁,降低了对隧道净空高度的要求,对各种轮廓和净空高度的隧道适用性强。整套腕臂的零件及紧固件数量都较少,更加便于预配安装,并且减少了运营工作维护量,如图8所示。

图8 盾构隧道接触网腕臂支撑装置安装
小断面盾构隧道接触网悬挂方案已在珠三角莞惠城际铁路首个内径7.7 m盾构隧道中成功应用。除了盾构隧道,工程中的低净空矩形明挖隧道、马蹄形暗挖隧道均用了新型腕臂接触网悬挂系统,进而实现了全线各种类型低净空隧道的接触网简统化安装。运营至今,现场反馈接触网系统在160 km/h行车速度下受流状态稳定,维护工作量小,运营状态良好。
