ADAS系统实车道路测试路线方案研究
2022-02-15范立,周亮,陶乾
范 立,周 亮,陶 乾
ADAS系统实车道路测试路线方案研究
范 立,周 亮,陶 乾
(招商局检测车辆技术研究院有限公司,重庆 401329)
ADAS系统车辆在进行真实道路实车测试时,对其测试路线进行有效选择和制定是ADAS系统车辆道路测试亟需突破的问题之一。文章基于对ADAS系统环境感知技术的分析,考虑道路交通安全影响因素,提出了ADAS系统车辆测试的道路场景分类及路线选取原则,为提高道路测试效率和效果提供支持。
ADAS系统;传感器;道路测试
前言
高级驾驶辅助系统(即ADAS系统),其原理是利用各类车载传感器,采集汽车内外部的环境数据,对道路环境中动态和静态的物体进行识别、探测与跟踪等处理,从而引起驾驶者注意,并让其在最短时间内察觉可能发生的危险,以提高安全性的主动安全技术。它涵盖了诸如车道偏离预警系统(LDWS)、车道保持辅助系统(LKAS)、盲点监测系统(BSD)、自动紧急制动系统(AEB)、自适应巡航系统(ACC)等。目前ADAS产品可划分为信息感知类、决策预警类、驾驶辅助类和部分自动驾驶这四大类功能。
随着汽车日趋普及化,交通拥堵和事故高发引起了全社会的广泛关注,为了降低交通事故率,提高出行安全和效率,高级辅助驾驶系统(ADAS)的研究和应用已经取得了突破进展,并使得自动驾驶技术呈现出实用化的趋势。ADAS系统的测试包括软硬件仿真在环测试、场地测试、实际道路测试等环节。中关村智通智能交通产业联盟发布《自动驾驶车辆测试道路要求》,对测试道路进行分级[1]。
实际道路即为完全真实的道路场景,所有的道路基础设施、气候环境、交通参与者均为真实的,不受任何人为因素影响。且所有事件的发生均为随机,因而在测试过程中,无法预先设定其初始条件,被测车辆在实际道路环境中行驶的过程均为测试过程,因此对ADAS系统也提出了更严格的要求。基于当前自动驾驶技术飞速发展的要求下,对搭载ADAS系统车辆进行实车道路测试显得极为重要,通过对ADAS系统车辆开展实车道路测试,既可以对新技术进行测试验证,还可以检验ADAS系统车辆的安全性。国内各整车厂在车型开发过程中,对ADAS系统的标定极大程度上依赖于国外几家大型供应商(博世、大陆集团、飞思卡尔等企业),标定测试过程为:使用该研发车型进行大量道路测试,通常情况为8万公里以上,定期将数据回传至供应商企业,或者由供应商企业对ADAS系统的各项参数不断进行调试,最终实现该研发车型最优匹配。因此,现阶段ADAS系统车辆须进行大量的道路测试来验证其安全性能,但测试效率和效果均有待提升。基于现有技术,对道路测试的路线进行有效选择和制定是ADAS系统车辆道路测试亟需突破的问题之一。本文基于对ADAS系统环境感知技术的分析,考虑道路交通安全影响因素,提出了ADAS系统车辆测试的道路场景分类及路线选取原则,为提高道路测试效率和效果提供支持。
1 ADAS系统环境感知技术
ADAS 系统工作的基础为车辆感知识别技术,该技术的功能是感知并识别道路交通环境、车辆内外部情况,该技术依赖于多种的车载传感器,以及在传感器获取到环境图像后,对车道线进行识别和提取,以进行下一步的决策。
1.1 车载传感器
卫星图像、照片和点云数据均为道路环境数据的主要来源途径[2]。照片主要来源于航拍或者视觉传感器,对其拍摄的照片进行图像识别处理,从而获取道路像素和二维位置信息,进一步帮助系统辨识障碍物、行人和道路中的设施设备等。视觉传感器即为摄像头,依据不同的模块和配置,分为单目、双目、多目和红外等。摄像头视野和感知能力有限,且容易受照明度和天气影响,车载摄像头的感知原理是:(1)图像处理,首先将图片中的所有信息转化为数字信号;(2)通过图像进行匹配和识别,例如对车辆、行人、道路交通标志标线等识别;(3)通过对物体运动模式的解析,或双目定位等方法,测算目标物与被测车辆的相对位移和速度。通过以上原理,可使得车辆感知到周边的道路环境,从而实现ACC、AEB和LDW等ADAS功能。
雷达则是通过自身发射电磁波来感知环境,从而获取目标的位置和速度等信息,目前受广泛应用的是超声波雷达、毫米波雷达和激光雷达,将上述传感器的感知能力进行对比分析,其结果见表1。超声波雷达不受雨水和尘土的干扰,但其视角小,需同时配置多个,才能获得广角视野。毫米波雷达优点在于具有穿透烟、灰尘和雾的能力,局限性在于对反射波较弱的行人难以识别。激光雷达通过扫描周围环境获取相关信息,识别出目标物的三维位置,其优点在于感知距离长,分辨率和精度高,缺点在于成本高,且易受到环境因素的影响。
表1 传感器感知能力对比
传感器环境适应性天气良好的感知能力天气恶劣的感知能力最长感知距离/m 激光雷达中强弱150 毫米波雷达强中中70 超声波雷达中强弱5 摄像头(可见光)弱强弱>200 摄像头(远红外)强强强100~200
1.2 车道线的识别与检测
对于车道线的识别与检测,通常使用的传感器为摄像头、雷达、GPS等,对不同传感器的功能进行研究分析,其功能概述见表2。
表2 传感器功能概述
传感器配置功能概述 摄像头(单目视觉)基于车道线清晰的视觉特征,目前应用最广泛的传感配置,检测获取图像中的车道线特征。 摄像头(多目视觉)主要为三维视觉,通过检测障碍物角度等变化、路沿、道路坡度等,为车道线检测提供约束条件。 激光雷达其成本高,通过构建道路的三维信息,可提供视觉检测约束条件;若只用激光雷达,则通过提取车道线与非车道线反射率差异实现。 雷达仅能提供两种信息:(1)障碍物信息;(2)高速路段的边界信息。不能直接用于车道线检测。 GPS、GIS可提供车前道路车道线形状先验,在城区内的定位精度不高。
车道线的提取是车辆横向辅助控制系统的主要决策依据,其识别原理为:车载传感器在获取环境数据后,进行处理并划分出道路区域和周边环境的界限再拟合形成道路边线,若道路边界不清晰,则需对道路边缘进行再检测,成功提取车道线后再进行拟合,流程如图1所示。
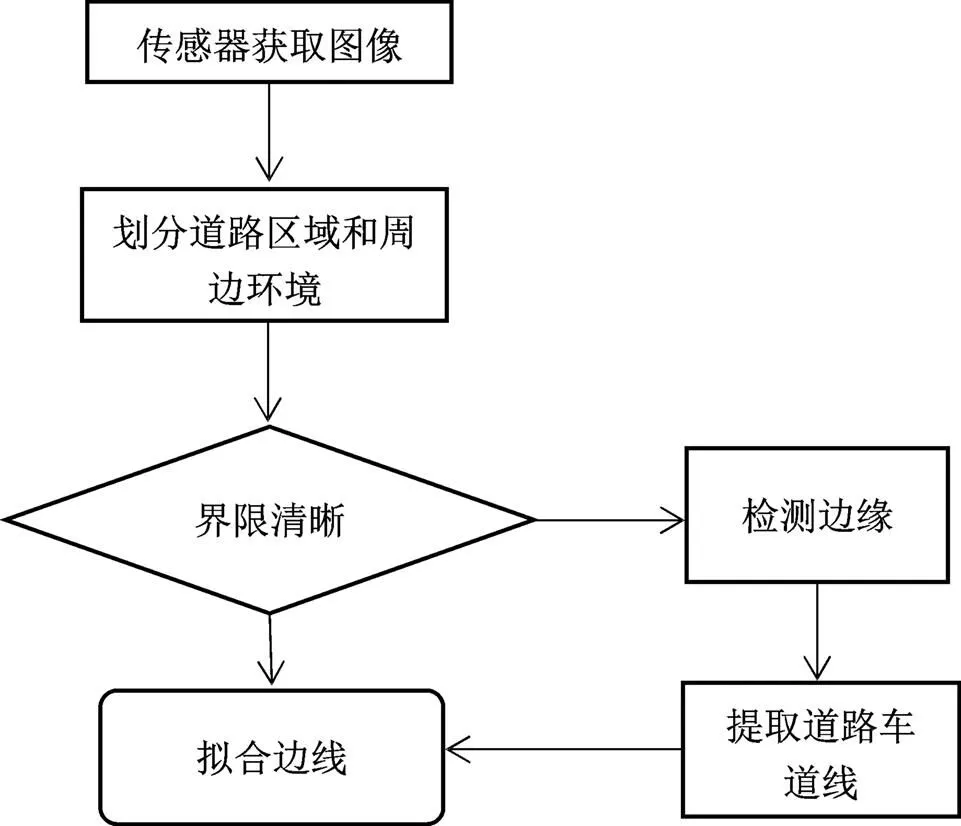
图1 车道线识别原理示意图
2 道路环境影响因素
车辆通过雷达、摄像头等传感器对道路环境因素进行感知和识别,并以此为行为决策的依据。然而在不同的道路条件下,车辆对于环境的感知难度亦不尽相同,因此有必要对道路环境相关影响因素进行分析。结合现有的ADAS技术,从道路角度统筹分析道路结构类型、交通设施、其他潜在影响因素,作为实车道路测试路线方案选择的前提条件。
2.1 道路结构类型
结合道路识别检测原理,实车测试道路包含结构化道路、非结构化道路以及特殊区域道路:
(1)结构化道路一般是指高速公路、城市快速路和城市主干路等具有明显可识别物的道路[3]:车行道和道路其他区域之间分界明显,路面平整度高,大部分路面材质分布均匀,道路线形规范;车道线宽度、间距一致,排列整齐且连续性高,易于车辆通过车道线和车行道边界进行识别检测。
(2)非结构化道路一般是指城市支路、乡村道路等不具有明显可识别物的道路:缺少清晰连贯的车道线和道路边界,路面平整度较差,再加上积水、树荫等因素的干扰,使得车辆识别非结构化道路环境难度明显大于结构化道路。
(3)特殊区域道路主要指桥梁、隧道、立交匝道、交叉口、施工占道区域等道路功能、车流状态、信号控制等与常规连贯行驶道路不同的道路:车流行驶速度低,事故率较高,道路环境十分复杂。
2.2 道路交通设施
道路交通设施是实现行车安全快速的重要保障,车辆辅助驾驶系统通过对交通设施进行快速感知并做出相应的车辆行为。交通设施主要包含交通标志、交通标线、防撞设施、交通信号系统、照明设施等,其中,前三者对道路安全的影响大。
1.2.2 对照品贮备液的制备 精密称取NOR、OFL、TC、OTC、SDZ、SMZ对照品适量,用超纯水(已用5 mol/L HCl调节pH至3.0左右)分别稀释制成2.0 mg/mL对照品贮备液。
2.2.1交通标志
交通参与者通过交通标志上的文字和图案获得信息,再进行驾驶行为决策。交通标志按功能分为主标志和辅助标志,主标志可分为以下七类:警告标志、禁令标志、指示标志、指路标志、旅游区标志、作业区标志和告示标志。
2.2.2交通标线
交通标线的常见表达方式有文字、图案、立面标记和轮廓标等,按照使用功能可分为指示、禁止和警告三类,按照设置方式可分为纵向、横向和其他。颜色通常为白色或黄色,由实线、虚线或虚实线组成。
2.2.3防撞设施
防撞设施有防撞护栏、防撞桶、防撞水马等,主要作用是在正常行车中诱导视线,在发生事故时吸收碰撞能量,防止事故车辆冲出道路,减轻事故车辆及人员的损伤程度。
2.3 其他影响因素
日照长度、能见度和平均风速等因素对道路交通安全的影响显著。日照长会相应减少不良天气状况的时间;能见度高,存在的安全隐患相对减少,能见度低会使驾驶员视线受到阻碍,极大地影响道路交通安全;平均风速和交通事故频次成正比,风速会影响车辆的稳定性和操控难度,也会影响系统检测识别性能,而车辆搭载不同类型的传感器,其识别能力也不同。
2.3.2光照条件
根据道路交通事故数据统计,尽管白天的事故率高达70%,但结合交通量和事故严重性等因素进行综合考量后,认为物体视认性变差的夜晚的危险程度更高。在夜间驾驶员的视觉神经细胞受到强光刺激时会导致短暂视力下降,产生眩光,严重时会影响驾驶安全。夜晚开车时,环境光线较暗,视野不清晰,视觉范围变窄,再加上各种光源(远近光灯、交通信号灯、街灯)的干扰,人的反应敏锐度会大大降低,这种情况下极易出现交通安全事故。
2.3.3地形条件
针对车辆驾驶的相关需求,结合地形条件的特征可将道路简单划分为平原道路和山地道路。平原道路的特征是视野开阔,拥有良好的线形和道路条件,长直线多,弯道坡道少,对驾驶员来说,可能产生视觉疲劳甚至超速等状况;山地道路具有视线条件差,临崖路段和长陡坡路段较多,平曲线处圆曲线半径和横断面宽度小等特征,行车时还需注意落石和边坡滑塌,在弯道和上下坡的平纵组合路段行驶较为困难,或出现速度和方向难以把控而导致车辆滑移甚至倾翻的危险[4]。
3 道路测试路线方案
结合不同车载传感器的特征以及车辆在实际道路中行驶时的道路环境影响因素,根据道路测试的策划原则(系统功能逻辑、传感器局限性、边界条件等),先确立路线所需的场景组成要素,分析对传感器产生影响的场景环境,再确定路试场景,最后制定出包含路试所需场景的测试路线。
3.1 场景要素
通过分析标准规范场景,包括ISO、NTHSA、SAE、ENCAP、FMCSA 和 ADAS 场景[5],结合网络事故视频、公安交管道路交通事故数据和事故还原等道路交通事故和人为驾驶经验,梳理出自动驾驶车辆道路测试场景要素库,其中包括路段、车道、道路交通标志、道路交通标线、交通信号灯、其他设施和天气以及交通参与者,见表3。
表3 路测场景要素表
基本要素要素组成 路段双向、T型路段、十字路口 车道两车道、四车道、单车道 道路交通标志警告标志、禁令标志、指示标志、指路标志、施工标志、辅助标志 道路交通标线指示标线、禁止标线、警告标线 交通信号灯机动车信号灯、非机动车信号灯、人行道信号灯、方向指示信号灯、车道信号灯、闪光警告信号灯 其他设施收费站、公交车站台、减速带、停车场、充电站、加油站、锥形桶 天气白天、黑夜、晴天、雨天、雪天、雾天 交通参与者测试车、机动车、非机动车、行人、动物、其他障碍物、移动式交通管控设施
3.2 传感器环境测试要求
以目前应用最为广泛的摄像头和毫米波雷达为例,分析在道路测试中,传感器所需的环境测试要求,具体如图2、图3所示。
3.3 道路测试场景集
结合已知道路的驾驶数据、道路环境测试需求、被测车辆及其辅助驾驶功能的特征等,对道路测试场景集进行分类,进行未知、典型自动驾驶测试场景的构建,挖掘、评估未知场景和典型场景,如图4所示。
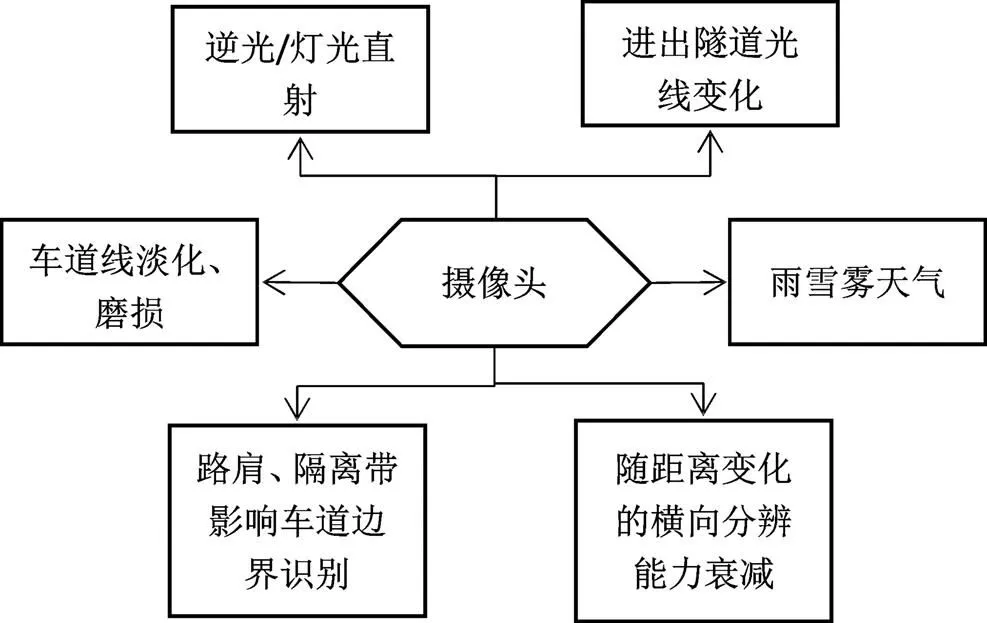
图2 摄像头环境影响分析图

图3 毫米波雷达环境影响分析图
3.4 道路测试路线制定原则
基于以上分析,测试车辆配置的FCW、LDW、LKA、BSD、AEB、ACC/ICA/TJA等高级辅助驾驶功能,主要测试驾驶员日常自然驾驶场景下的各个功能的实际表现,测试道路覆盖高速、国道、城市等不同道路条件,另外覆盖不同光照、天气和交通环境,真实的测试车辆的ADAS系统。
道路测试期间车辆行驶区域覆盖多种天气和交通环境条件,其中天气情况分为晴天、阴天;光照条件分为白天、傍晚、夜晚;道路类型分为高速道路、国道省道道路、城市道路(含城市快速路);从交通状况角度又分为拥堵路况、非拥堵路况;从交通参与者角度分为单一交通(只有机动车参与)、混合交通(除机动车外有行人、两轮车、三轮车参与)。道路类型、天气情况、光照条件的差异伴随着交通流和道路周边基础设施的差异,同时对车辆功能的也有很大的影响,因此,在不同的道路条件下对车辆进行ADAS功能测试,能够更好地测试车辆ADAS系统对不同道路环境的适应能力。测试道路类型里程分布,高速、国道/省道、城市总体比例的合理分布比例为3:4:3;测试天气分布,晴天、阴天、雨天总体比例的分布为6:2:2;光照条件分布,白天、傍晚、夜晚总体比例分布为6:3:1,按照以上原则可制定适用于整车主动安全系统道路测试的具体路线。

图4 道路测试场景
4 结语
以上针对实车道路测试开展的相关研究,对ADAS系统测试和低等级自动驾驶技术的测试提供帮助,并为自动驾驶测试理论体系搭建和技术研究积累了经验,有了以上研究基础的支持,众多道路测试实践工作逐步开展,其研究范围覆盖了主动安全功能测试、能效测试、传感器测试等内容[6],获得的研究成果也使得测试场景和路线的研究进展有了新的突破。但自动驾驶测试实践等相关领域仍旧面临众多挑战,这些挑战值得在后续的研究中完善和解决。
[1] 中关村智通智能交通产业联盟.自动驾驶车辆测试道路要求[S].北京:中关村智通智能交通产业联盟,2019.
[2] Yadav M,Singh A K,Lohani B.Extraction of road surface from mobile Li DAR data of complex road environment[J]. Journal of Remote Sensing,2017,38(16):4645-4672.
[3] 王越,范先星,刘金城,等.结构化道路上应用区域划分的车道线识别[J].计算机应用,2015(09):279-283+292.
[4] 黄兰.自动驾驶混行公路的可靠性安全评价方法研究[D].广州:华南理工大学,2020.
[5] NAUMANN M,LAUER M,STILLER C.Generating comfor- table, safe and comprehensible trajectories for automated vehicles in mixed traffic[C].international conference on in- telligent transporta.tion systems. ITSC,2018.
[6] 赵祥模,承靖钧,徐志刚,等.基于整车在环仿真的自动驾驶汽车室内快速测试平台[J].中国公路学报,2019,32(6):124-136.
Research on Real Vehicle Road Test Route Scheme in ADAS System
FAN Li, ZHOU Liang, TAO Qian
( China Merchants Testing Vehicle Technology Research Institute Co., Ltd., Chongqing 401329 )
It is one of the most important problems to select and formulate the test route of ADAS system vehicles when they are tested on real road.Based on the analysis of environment perception technology of ADAS system and considering the influence factors of road traffic safety, this paper come up with the principle of road scene classification and route selection for vehicle test of Adas System, which provides support for improving the efficiency and effect of road test.
ADAS system;Sensors;Road test
B
1671-7988(2022)01-40-05
U467
B
1671-7988(2022)01-40-05
CLC NO.:U467
范立,就职于招商局检测车辆技术研究院有限公司。
10.16638/j.cnki.1671-7988.2022.001.010
