基于Wi-Fi通讯的履带式爬楼运载小车*
2022-02-15张旭焱胡君岚朱帅宇
张旭焱,胡君岚,朱帅宇
(武汉理工大学,湖北 武汉430070)
随着中国物流产业的扩大和人们对物流运送速度和品质要求的提高,单一的人力物流网络在满足需求时需要消耗大量人力及其他资源,在2020年爆发“新冠肺炎”之后,也对运载机器人提出了无接触运输的新要求。
目前,国内外相继研究出不同功能类型的物流运输机器人。美团开放平台的Segway配送机器人可以适应不同复杂地形,自动规划路线甚至搭乘楼梯,但是目前尚不具有爬楼功能[1];StarshipTechnologies部署的地面机器人能够通过APP直接反馈订购信息,实现自动运输服务,但是该机器人的运送范围具有限制性[2]。
为了使各类消费者能够享受更加便捷、高效率的物流服务,本文设计一款基于Wi-Fi通讯的履带式运载小车,在满足平地避障、与顾客进行通信交互的功能下,通过在配送范围内安置“热点”,利用Wi-Fi技术实现运载小车更远范围的配送;利用履带式越障实现小车在平地与爬楼的运动,满足无电梯公寓高楼顾客的要求,在特殊时期实现无接触式配送服务。
1 系统总体设计
本文所设计的产品将Wi-Fi无线通信技术、Arduino、传感器技术、通信技术与自动化技术结合,得到基于Wi-Fi控制的爬楼运载小车,通过Arduino与各传感器模块之间的控制反馈对小车的水平和爬楼运动进行控制,完成物品的运输。
结合本文所设计产品的任务要求和应用场所,通过调查综合分析,确定小车移动结构、尺寸关系等基本技术参数。系统总体设计分模块进行设计,分为机械结构模块和控制系统模块,两模块之间控制反馈关系如图1所示。
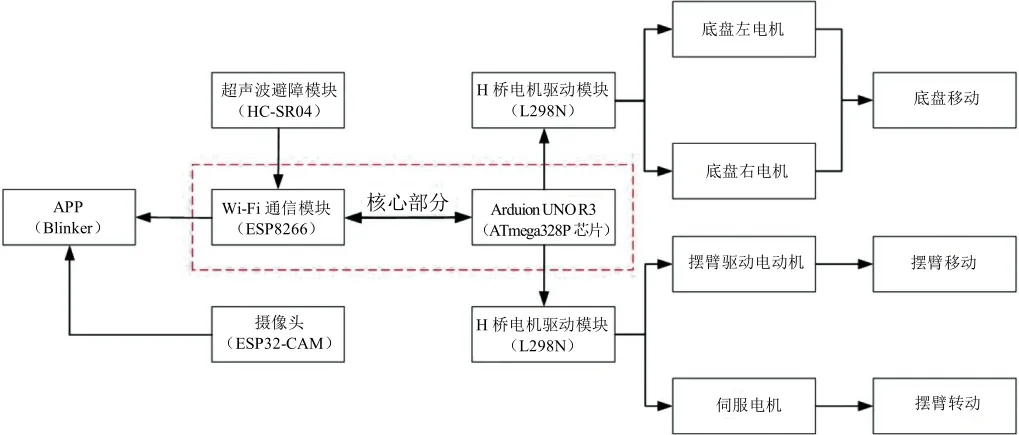
图1 系统总体设计图
机械结构模块采用组合创新技术和方法进行研究设计,为确定机械结构设计的合理性,绘制三维模型图并进行运动仿真。为确定机器人运动平稳性,结合实际应用场所,利用数学公式对小车尺寸进行合理化计算和设计。
控制系统模块通过分析各模块之间的交互关系,利用电路模拟仿真软件完成电路的搭建与仿真实验。通过Wi-Fi通信模块,将Arduino主控板与blinker物联网平台进行适配连接,实现在线对小车运动和其他功能的控制。
2 机械结构设计
2.1 机械结构总体设计
小车机械结构主要由主体模块、摄像头模块、载物模块、移动模块和爬楼模块构成。其中移动模块和爬楼模块设计为四履带双摆臂履带式。利用SolidWorks
软件对小车的机械结构进行设计,如图2所示。小车爬楼模型,如图3所示。
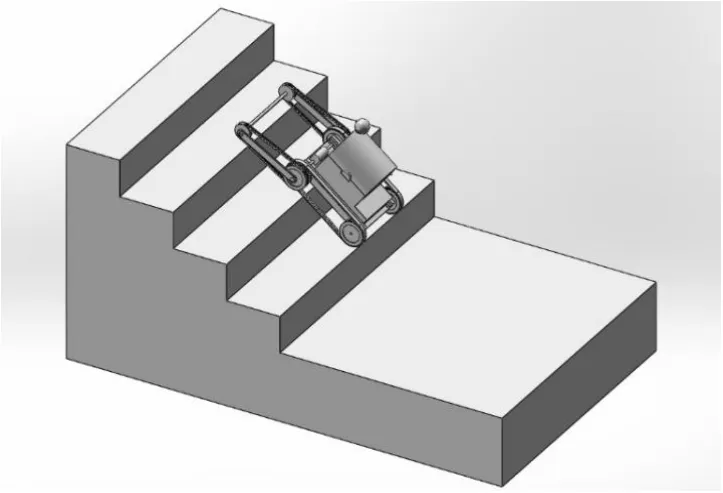
图3 小车爬楼模型图
2.2 机械结构分析
图2中,Ⅰ为主体模块,内含控制电路、直流电机、通信设备等。直流电机提供动力,控制电路通过ATmega328P芯片为核心控制各传感器模块,完成小车的运动。Ⅱ为载物模块,用于装载物体。Ⅲ为摄像头模块,用来观察小车周围运行环境,及时发现障碍物避开以及确定楼梯位置进行爬楼。Ⅳ为移动模块,由一对履带轮组成,由主体Ⅰ中2个直流电机直接驱动后轮,提供小车在水平和爬楼过程中的动力。Ⅴ为爬楼模块,由双摆臂履带组成,摆臂通过电机提供动力驱动摆臂履带的转动,伺服电机通过2个齿轮带动连接摆臂的轴,驱动摆臂摆动。摆臂的主要功能是向机器人提供拉力以及刚接触台阶时向上的支持力,以实现机器人的爬升。
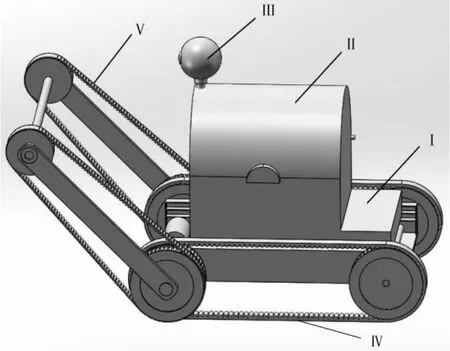
图2 小车机械结构示意图
2.3 尺寸综合设计
在小车爬楼过程中,为确保小车能够成功完成爬楼动作,并保证运动的平稳性,需要满足以下条件。
准备进行第一阶楼梯的攀爬时,调整摆臂能够接触台阶的边缘[3],如图4所示,根据图4可得摆臂尺寸与阶梯高度的关系:

图4 准备第一阶楼梯的攀爬

式(1)中:α为摆臂与地面所成夹角,°,h为每级台阶踏步高,mm;r1为摆臂履带从动轮O2半径,mm。
小车成功爬越楼梯需要满足小车重心越过台阶的外角垂直线,爬越的临界条件是重心正好在台阶外角的垂直线上[4],如图5所示。设重心为G点,在临界条件下满足爬越条件,由图5分析,有以下几何关系:

图5 爬越楼梯运动
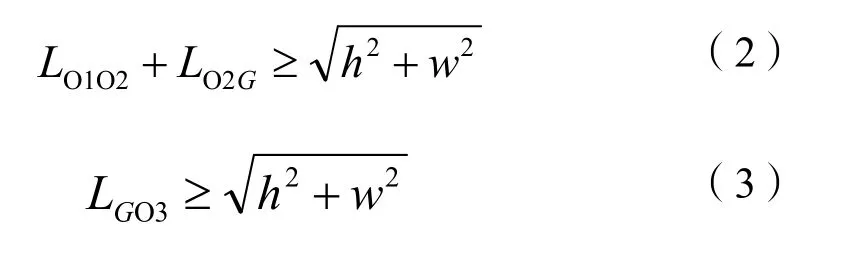
式(2)(3)中:w为每级台阶踏步宽,mm。
在小车完全进入楼梯后,为保证爬楼的平稳性,需要满足小车履带、摆臂履带至少能够接触2级台阶的边缘,保证小车整体长度能够同时接触3级相邻台阶边缘[3],满足式(2)(3)的长度关系。
根据《民用建筑设计通则》[5]:楼梯踏步宽w不小于260mm,踏步高h不大于175mm,不同楼梯类型需满足一定的踏步高宽比。选取摆臂履带从动轮O2半径r1为100mm,考虑到小车尺寸应满足式(1)(2)(3),LO1O2与LO2O3分别取350mm、150mm。
2.4 爬楼过程分析
当小车检测到前方障碍物为可翻越的楼梯时,小车进行正向楼梯的攀越,小车借助摆臂的初始摆角(取45°),在驱动装置的驱动下,小车履带的前端先接触到台阶的外角线上,随着小车的移动,小车的质心、前臂与水平面的夹角都在改变。随着小车质心移动,伺服电机运转,小车的前臂开始进行旋转,调整前臂夹角,使得小车主要依靠履带爬行。随着小车重心不断升高,前臂不断顺时针旋转,调整夹角,当小车质心越过楼梯外角线时,此时小车前臂已摆至和车身形成一条直线,车身完全贴合住楼梯外角线,随着履带继续旋转,小车将沿着楼梯外角线继续爬行。
此时小车进入整体爬楼阶段,小车完全进入楼梯并继续爬行,此过程小车前臂与车身间保持相对静止,小车质心沿着楼梯外角线作直线运动,此阶段车身震动较小,小车运行相对平稳。
当小车爬至最后一节楼梯,并检测到爬楼过程即将结束时,小车进入爬楼结束前状态调整阶段,当小车前臂越过最后一节台阶,伺服电机调整前臂旋转至触地状态,并保持前臂前端能始终与地面接触,随着小车的质心完全越过最后一节楼梯,小车继续前进,前臂摆角逆时针旋转直至与车身形成一条直线,小车攀越楼梯完成,小车恢复常态。
3 控制系统设计
3.1 控制系统总体设计
控制部分主要由Arduino单片机、Wi-Fi通信模块、电机驱动模块、超声波测距模块、摄像头模块等部分组成,利用Wi-Fi无线通信技术,用户可以通过手机APP软件与小车的Wi-Fi模块进行通信,以此实现对小车的控制与反馈,控制流程如图6所示。
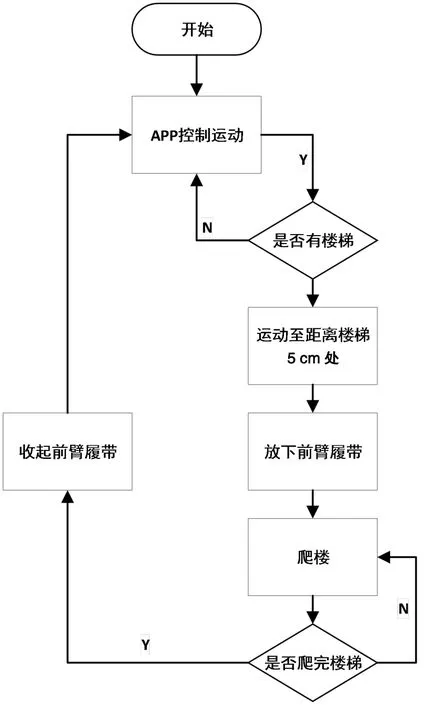
图6 小车控制流程图
3.2 模块设计
3.2.1 电源模块
选用12V铅蓄电池作为总电源为小车的电机驱动模块进行供电,同时使用降压模块将电压降为5V为摄像头模块等供电;使用7.2V锂电池并使用降压模块将7.2V电压降为5V为Arduino单片机与Wi-Fi模块进行单独供电,以保证小车主控芯片和Wi-Fi通信模块电压稳定。
3.2.2 主控板
控制系统的核心控制板为ArduinoUNOR3单片机,它基于ATmega328P芯片,有28个引脚,其中有14个数字I/O口,6个模拟输入口,数字I/O口中有6个支持PWM输出。主控芯片通过硬件串口与Wi-Fi模块进行通信,将控制指令传递至Arduino主控芯片,经过处理后通过Arduino单片机I/O口的输出高低电平,将脉冲信号作为控制信号传递至电机驱动模块,实现对电机的控制,进而控制小车的整体运动。
3.2.3 电机驱动模块
小车的运动需要水平履带的2个直流电机、前臂履带的2个直流电机和前臂摆动的1个伺服电机。直流电机驱动模块选择L298N电机驱动器,并由12V铅蓄电池单独供电,1个L298N驱动模块可以同时驱动2个直流电机,其ENA、ENB使能端连接在Arduino单片机的PIN5和PIN6可PWM调速引脚,IN1、IN2、IN3、IN4这4个信号输入端连接在其他4个数字I/O引脚上,来控制2个通道的直流电机运行。伺服电机模块由12V电源供电,将伺服电机控制端连接在Arduino的一个数字I/O口,通过控制Arduino向端口发送脉冲信号控制伺服电机的转动角度。
3.2.4 Wi-Fi通信模块
采用ArduinoUNOWi-Fi控制板,它是基于ATmega328和ESP8266Wi-Fi模组的Arduino控制板,具有Wi-Fi通信的功能,在局域网中可以与Blinker手机APP通信,实现手机APP与主控板的信息传递。将ArduinoUNOWi-Fi控制板的硬件串口与Arduino的硬件串口相连,实现2块控制板之间的通信与控制信号传递。
超声波传感器的接收与发送引脚连接在Arduino UNOWi-Fi控制板的引脚上,通过控制板引脚输出连续的一段高电平作为激发信号,触发超声波传感器工作,并监测接收引脚的电平高低与持续时间,实现对小车与障碍物之间距离的监测。
3.2.5 摄像头模块
摄像头模块选用ESP32-CAM模块,采用5V电源供电,保证摄像头模块的稳定运行。摄像头模块直接通过局域网将拍摄到的视频信息传递到手机APP上,实现对小车所处场景的实时监控。
3.2.6 超声传感模块
小车借助超声波传感器对外界环境中的障碍物进行探测,及时对小车速度及状态进行自动调整,避免撞到障碍物。超声波测距模块选用HC-SR04,传感器的Trig、Echo端连接在ArduinoUNOWi-Fi控制板的PIN2和PIN3引脚,由单片机发出高电平信号触发测距,通过测量超声波传感器接收的信号与发射信号的时间差t0来计算前方障碍物的距离。计算公式为:

式(4)中:v为声音在空气中传播速度,常温下取340m/s;t0为传感器发射与接收到信号的时间差。
4 结论
本文对于物流运载小车的爬楼控制具有研究意义,对于物流行业,消费者的结构复杂多样,本设计结合Wi-Fi技术、采用履带式爬楼结构研究运载小车,采用组合创新的方法完成小车的设计,在目前主流物流机器人的基础上增加了爬楼功能,更具灵活性,能够满足消费者的多种需求。因此,本文所设计的基于Wi-Fi通讯的履带式运载小车具有广阔的应用前景。
