面向对象的无人机遥感影像亚田块边界提取*
2022-02-15邱春霞李存军周静平淮贺举王佳宇张清燕
郑 茜,邱春霞,李存军,周静平,淮贺举,王佳宇,张清燕
(1.西安科技大学测绘科学与技术学院,陕西 西安710054;2.北京农业信息技术研究中心,北京100097)
近些年,中国农业朝着规模化、精准化、现代化方向发展[1],全国各地涌现出大批的家庭农场、农业合作社、农业社会化服务组织等[2]。亚田块边界信息是规模化现代农业发展必须掌握的基础信息[3-4],随着空天遥感技术的快速发展,高空间分辨率遥感影像能够更加精细地反映地物的空间分布特征,给田块边界和亚田块边界的提取提供了有效的数据支撑。本文以无人机高空间分辨率影像为数据,运用面向对象方法来进行亚田块边界的提取。
1 材料与方法
1.1 研究区数据
本研究区位于河北省沧州市泊头市西辛店乡,地处河北省中南部,东临渤海,背靠京津,地属海河冲积平原。研究区地势平坦,土地资源丰富,是京津冀的主要粮食生产基地。所在区域主要以小麦和玉米农作物为主,采用秋收玉米冬种小麦轮作耕种方式。田块形状一般为规则矩形,方便农业机械的统一管理。本研究区对于耕地边界的提取具有一定的代表性。于2020-11末获取的无人机RGB影像,此时正值小麦越冬分蘖期,地块边界比较清晰。
1.2 亚田块边界提取方法
1.2.1 图像分割
多尺度分割是面向对象中最常用的分割算法,是一种从单像素对象开始的自下而上的区域合并技术,根据均质性与异质性标准将像素在空间聚类为影像对象,使得异质性权重最小化,异质性标准主要包括光谱异质性标准与形状异质性标准,计算公式如下。
光谱异质性hcolor:

形状异质性hshape:

式(1)~(4)中:wc为各层的权重;n为对象的大小;merge表示合并后的影像对象;obj1与obj2分别表示2个用来合并的影像对象;σc为光谱值得标准差;wcompact为用户规定的紧致度参数;l为对象的周长;b为对象外切矩形的周长。
1.2.2 阈值分类与亚田块边界提取
本文基于面向对象开展亚田块边界提取,利用eCognition软件中提供的强大的特征库,但并不是特征越多分类精度越高,特征过多将会产生信息冗余,过少将得不到高精度的分类结果。本文使用eCognition软件提供的“FeatureSpaceOptimization”工具,对光谱特征、纹理特征、空间特征以及自定义植被指数特征进行基于分离度的特征优选,评价指标为最佳分离距离度量,公式为:

式(5)中:fi为特征空间的第i个特征;vfi(s)、vfi(o)分别代表训练样本s、o在特征i上的特征值;Qfi为特征空间内所有影像地块特征fi的标准差。
由于研究区无人机影像波段仅有RGB三通道,所以借鉴一些有利于分类的可见光植被指数较少,针对这个缺点,有些学者提出一些自定义特征,如表1所示。

表1 可见光波段植被指数
对表1中可见光植被指数进行定量与定性分析,将筛选出的植被指数来参与规则集的构建,主要筛选指标包括像元统计均值和变动绝对差值,其公式为:
式(6)(7)中:Dij为第i类地物中的第j个像元值;n为第i个地物类中的像元个数。
将选取的特征规则集用阈值分类法进行分类,阈值分类法是“真”和“假”逻辑判定的一种硬分类器,如果某个对象符合某类的阈值条件,则为“真”,若相反,则为“假”。阈值分类后的图像进行合并以及去除一些小图斑的影响,最终提取农田边界。
2 结果与分析
2.1 最优空间分辨率选取
通过采样得出在不同空间分辨率下,影像分割结果有很大差别,空间分辨率越高,地物的光谱特征与纹理特征越清晰,过分割现象越明显(4cm、6cm);相反,空间分辨率越低,越容易产生欠分割现象(30cm、60cm),并且在一些其他情况下(8cm、15cm)也会产生错分现象。因此,需平衡过分割现象与欠分割现象,选择适宜的空间分辨率,使得地块边界提取的精度更高,本文选取研究区地块的最优空间分辨率为10cm。根据实地调研,田埂宽度一般为40cm左右,恰好说明10cm空间分辨率能有效提取农田。
2.2 边界提取
2.2.1 可见光植被指数计算与筛选
根据表1所述公式分别计算6种可见光植被指数,得到各可见光植被指数的空间分布影像区域,得出除了VEG植被指数的空间分布为色调越亮植被指数值越小,其余植被指数的空间分布为色调越亮植被指数值越大,色调越暗植被指数值越小。其中,RGBVI、MRGVI、EGRBDI和GLI植被指数中小麦与裸地灰度值差异较大,小麦显示为亮白色,裸地显示为灰黑色和黑色,并且小麦区域的边界清晰,从整体看小麦提取效果较好。而NGBDI和VEG植被指数中小麦稀疏区域与裸地的灰度值相差较小,小麦区域边界较为模糊,不利于小麦边界的提取。
上述植被指数的空间分布只能定性地根据目视方法来评价,为了更好地比较和分析这几种植被指数,本文选取各典型地物的ROI,统计各典型地物在各植被指数中的像元均值和变动绝对差值,统计结果如表2所示。
由表2可知,各植被指数的像元均值在小麦与裸地地物之间无交叉现象,并且VEG、MGRVI和GLI植被指数在小麦与裸地之间像元均值差异较大,NGBDI、GLI和EGRBDI植被指数的变动绝对差值最小,均为0.1,因此选择GLI植被指数参与小麦地块的提取。
2.2.2 多尺度分割
结合本实验地块的特点,并根据一些公认特征,地块为规则矩形或者长条带状时,则可以考虑形状特征和范围特征,比如形状指数(ShapeIndex)、长宽比(Length/Width)特征,并且结合光谱特征、纹理特征以及自定义植被指数特征(GLI)进行特征优选,筛选出进行阈值分类的最优特征,当维数为5时分离距离最大,表明适合提取亚田块边界的特征有5种,相对应的规则集参数如表3所示。
根据上述构建的规则集,首先结合光谱特征和纹理特征对影像进行阈值分类第一步,然后针对未分类出的田埂利用形状因子、长宽比和GLI植被指数对影像进行再分类,最后得出精确的分类结果,将分类后的影像进行后处理,后处理主要对影像进行合并,并去除一些小图斑的影响,最终得到亚田块边界,如图1(a)所示。
为了更好地分析本文方法在田块提取方面的优劣性,本文结合ENVI软件中FeatureExtraction模块进行对比,FeatureExtraction模块是提取田块当前比较主流的方法,在提取耕地时,将地物主要分为小麦与裸地2类,主要设置的参数为分割尺度、合并尺度以及分类方法的选择,针对本文田块的特点,经过多次实验,最终确定分割尺度为60,合并尺度为80,分类算法选择支持向量机(SVM)算法,最终提取结果如图1(b)所示。
2.3 亚田块边界提取精度
通过目视对比1(a)和1(b)可知,本文方法比支持向量机方法的耕地误提取较少,这是由于本文方法构建的规则集可以很好地区分耕地与非耕地,而用支持向量机提取的耕地误提取与漏提取较多,将一些长势不好的小麦误分为耕地。综上分析可知,本文方法提取亚田块边界较好。
为了使评价结果更加客观,以人工目视解译边界为参考,将本文方法与支持向量机方法提取的耕地进行定量评价,如图1(c)所示。本文方法提取耕地总体精度较支持向量机方法高12.8%以上,用多尺度分割和构建规则集来进行分类,比支持向量机手动选择样本效果更好,在一定程度上说明本文方法提取亚田块是可行的。
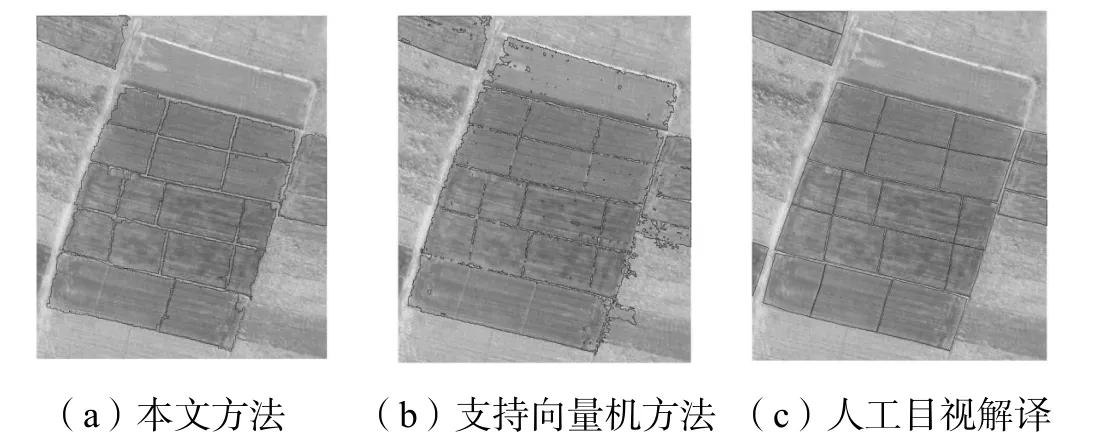
图1 不同算法的亚田块边界提取结果
3 小结
总体来说,本文方法在亚田块边界提取中取得较好效果,特别是在华北平原地区划定亚田块边界具有很大的潜力。本文研究区选取小麦越冬分蘖期进行实验,分蘖时期小麦长势弱以及不均匀,田块间小麦不能够完全覆盖裸土,使得漏分现象较明显,田块边界提取较难。在接下来的研究中,需结合多时相影像进行实验,使亚田块边界的提取更加精确。本文仅局限于泊头市西辛店乡进行实验,在后续实验中,应选取多个试验区进行适宜性分析。
