外辐射源多通道前视SAR接收机系统设计与实现
2022-02-14王承昊刘飞峰王战泽徐智祥
王承昊 刘飞峰 王战泽 徐智祥
(1.北京理工大学信息与电子学院雷达技术研究所,北京 100081;2.卫星导航电子信息技术教育部重点实验室(北京理工大学),北京 100081)
1 引言
外辐射源前视多通道SAR 是一种以非合作照射源作为发射机,具有多个位于目标场景区域正前方的接收单元的双基地SAR 系统。外辐射源前视多通道SAR 与传统正侧视收发一体SAR 系统相比,具有构型设计灵活、前视成像幅宽大、目标区域信噪比高、生存能力强、体积小、成本低等显著优势,能够快速部署在地面或小型无人机等轻型载荷上,实现对正前方敏感区域的有效监测,在地面重点目标监视、物资空投、精确制导打击等需求下具有重大实用价值。
近年来,国内外已开展一系列关于双基地SAR系统的研究。日本东京大学、法国、意大利联合研究团队采用对地静止卫星发射的连续数字电视信号作为外辐射源,构建地基外辐射源双基地SAR 系统,可以对100 m以内的不同目标(如栅栏,灯杆,树木和汽车)成像[1]。意大利和英国学者利用导航卫星作为外辐射源的多基地SAR 系统,对海面目标进行检测和定位[2-4]。Hajar Abedi 等人对外辐射源双基地SAR 穿墙成像进行了研究[5]。欧空局研究团队使用C波段的卫星Sentinel作为非合作外辐射源,在地面部署接收机,进行双基地干涉实验[6]。
国内,北京理工大学在包头地区开展小型无人机载前视双基地SAR 实验,并提出一种改进的NCS算法用于实测数据处理[7];以北斗二代导航卫星作为外辐射源,地面部署接收机的方式,开展GNSSBSAR 城区成像和形变反演实验[8-15]。电子科技大学相继提出了一种双基地前视SAR 嵌入运动参数估计的FFBP 算法[16]、一种针对高速机动前视SAR的PFA 算法[17]、一种用于扩展空-时杂波抑制的双基地前视SAR MP-DPCA 方法[18]。西安电子科技大学提出了一种基于椭圆正交基坐标的双基地前视SAR 的FFBP 算法[19]。中科院提出了一种多基地SAR俯仰多通道强距离向模糊估计和去除方法[20]。
目前国内外研发的大部分双基地SAR 系统,存在前视成像质量低、通道数少、系统开发成本高、部署难度大等问题。为了进一步发掘双基地SAR 系统的应用潜力,本文设计了一种小型化多通道外辐射源前视双基地SAR 接收机系统,并完成了系统的整机集成和调试工作。第2部分对多通道外辐射源前视双基地SAR 接收机系统的组成和各模块的功能,以及双基地同步方案进行了详细阐述。第3 部分展示了输入频率步进的单频点信号,系统的测试结果,同时也获得了实测转发器成像结果,验证了系统设计、开发的正确性与实用性。第4 部分对本文的工作进行了总结。
2 外辐射源多通道前视双基地SAR 接收机系统
2.1 外辐射源多通道前视双基地SAR 接收机系统组成
外辐射源前视SAR多通道接收机系统包含4个独立的回波通道和一个直达波通道,可以保证在任意双基地构型下直达波的有效接收。系统主要包括总控分机、双通道数字分机、射频分机、组合导航分机、时频分机、伺服分机、二次电源分机、飞控模块(地面控制台)。其组成结构简图如图1所示。
射频分机的主要功能是从天线接收Ku 波段射频信号,对射频信号进行下变频处理,将中频信号传送至3 个数字分机。接收机系统共有5 个射频分机,即5个信号通道,其中4个接收回波信号,1个接收直达波信号。采集直达波信号是为了在数据处理环节进行精确的发射机和接收机时频同步处理[21]。
数字分机的主要功能有:(1)采集、存储来自5 个射频模块的回波信号和直达波信号。1 个数字分机有2 路AD,其中2 个数字分机用于采集、存储4 路回波信号,1 个数字分机采集和存储1 路直达波信号,即3 个数字分机共采集和存储5 路信号。(2)伺服分机控制功能。1 个数字分机接收到来自总控分机的控制指令后,对伺服分机下发姿态控制信息,使伺服分机指向预设的角度。
总控分机是外辐射源前视SAR 多通道接收机系统最核心部分,主要功能有:(1)同步时钟分发功能。总控分机接收来自时频同步模块的1 pps 触发脉冲和20 MHz 正弦同步工作时钟,将1 pps 触发脉冲分发至3个数字分机,将20 MHz正弦同步信号分发至3 个数字分机和5 个射频模块,实现系统各分机之间的时频同步。(2)控制指令分发功能。总控分机接收飞控模块(地面控制站)发送的控制指令通过RS422协议分别发送至3个数字分机,通过SPI协议发送至5 个射频模块,同时接收3 个数字分机和5 个射频模块的工作状态反馈信息,再将反馈信息传送回飞控模块(地面控制站),实现系统控制指令和工作状态信息在各个分机间的传输。(3)姿态信息分发功能。总控分机接收来自惯导模块(组合导航模块)的姿态信息,将姿态信息传送至1块信号处理板,实现系统姿态信息在各分机间的传送。总控分机与其他分机的连接简图如图2所示。
伺服分机的功能是接收来自数字分机的姿态控制指令,调整天线的俯仰、方位角度,确保接收机天线波束指向与发射机一致,实现波束指向同步。同时将工作状态信息反馈至数字分机。惯导(组合导航模块)的功能是定时为系统提供当前位置、速度、加速度等运动状态信息,将运动状态信息传输至总控分机。飞控(地面控制站)向系统提供配置参数,包括脉冲宽度、PRT、回波和直达波起始采样时间、射频模块增益、伺服俯仰角、伺服方位角、距离向采样点数、起始频点等。二次电源向系统各分机提供使其正常工作的电压和电流。时频同步模块为系统提供同步脉冲和参考时钟。
对各硬件分机进行整合组装,外辐射源前视SAR 多通道接收机系统硬件整机如图3所示。各硬件分机都安装在吊舱中,吊舱重量约10.4 kg,可部署于小型无人机上,吊舱与支撑结构固定后,可较为便捷地部署在地面上。
外辐射源前视SAR 多通道接收机系统整机集成后,对整机进行调试,使硬件系统各分机与飞控(地面控制站)之间协同工作。调试环境如图4 所示。调试所需仪器包括示波器和频谱仪等。
2.2 外辐射源多通道前视双基地SAR 时频同步方案
为了增加外场实验的可控性与便捷性,选定机载雷达发射机作为外辐射源。机载雷达的发射信号体制一般为脉冲信号,单点目标的基带回波信号的表达式可建模如下:
其中,Tn为第n个脉冲的实际发射时刻,Tp为发射脉宽,τk(n)为第k个目标的第n个脉冲的回波延时。当考虑系统频率误差时,发射机第n个脉冲的实际的发射时刻为Tn,载频的瞬时频率误差为fe(t),那么有fc(t)=f0+fe(t),第n个脉冲实际发射的载波相位为:
其中φ0是发射机相参振荡信号的初始相位。
接收机实际接收时刻为Tn+τ(n),本振的瞬时频率误差为(t),那么有(t)=f0+(t),接收机进行相位检波时的相位是:
φ0'是接收机相参振荡信号的初始相位。
相干检波提取的相位差为:
其中:
相位误差只随慢时间变化:
表达式中,θ2(n)=-2πf0τ(n)对应方位向多普勒相位项,用于进行方位向的匹配滤波;θ0=φ0-φ0'对应发射载波信号与接收载波信号初始时刻相位差,不影响成像;θ1(n,Tn+τ(n))对应收发之间频率同步误差和时间同步误差而引入的随慢时间变化相位误差,相位误差的形式有频率误差的形式决定,影响最终的成像。如果fe(t)和fe'(t)均为固定值,则慢时间域存在线性相位误差,造成方位向移位;若fe(t)和fe'(t)随慢时间成线性变化,则相位上存在二次相位误差项和线性相位误差项,造成方位向散焦。fe(t)和fe'(t)的随机抖动,则会造成噪声基底抬高。
以下面的系统参数为例,给出双基地SAR 系统对时间同步误差和频率同步的要求,并最终转换成系统对频率基准的误差要求。工作频率f0=15 GHz,脉冲宽度Tp=3 μs,发射带宽B=50 MHz,合成孔径时间Ta=1.5 s,PRT=100 μs,采样率fs=160 MHz,发射机速度Vt=20 m/s,接收机静止,发射机作用距离RT=1km,接收机作用距离Rr=5 km。时间同步误差要求图像在距离向上的位移小于一个聚焦深度,双基地情况下调频斜率为:
外辐射源多通道前视双基地SAR 的时频同步方案分为粗同步和精同步两个步骤。粗同步实现方案是发射机和接收机系统使用同一规格的时频同步模块,通过收发间高稳定相参的1 pps 脉冲维持帧同步信号和PRT 信号的产生,实现时间同步;利用高精度频率20 MHz 参考信号实现收发系统本振、中频信号的相参和频率同步。对两个时频模块输出的20 MHz 信号进行了采集,分析单个PRT 内两路信号的相位偏差,结果如图5所示。
统计可得,相位偏差标准差为0.0288 rad,对应的相对频率偏差为=2.29e-10<σ,满足收发之间频率基准的相对频率偏差指标。通过多次测量,得到频率误差系数随时间变化的关系,如下表1所示。

表1 频率误差系数随时间变化量Tab.1 Change of frequency error coefficient with time
时频同步模块随着工作时间的增加,其精度指标有所提高,频率误差系数也即准确度能达到1e-11量级,满足单位时间频率漂移精度指标。时频同步模块的1 pps秒脉冲的时间同步精度为±20 ns,满足时间同步精度指标,因此该时频同步模块可以用于外辐射源双基地SAR的粗同步时频基准。
同一PRT 内,直达波信号或者转发器的信号与目标场景回波信号的相位同步误差可以认为是一致的,则目标场景回波信号的相位同步误差可以通过提取直达波或转发器信号的相位误差来补偿。因此,针对目前双基地SAR 系统中相位同步误差随机抖动较大的情况,可以利用直达波信号或在目标场景中设置转发器来提取随机相位同步误差,从而补偿目标场景的相位同步误差,进一步提升同步精度。
直达波可看作是只含单个点目标、信噪比非常高的单程回波信号,利用直达波提取相位同步误差可以补偿场景回波的相位,总体方法是:采集场景回波和直达波数据,对直达波数据进行距离向脉冲压缩,提取直达波各个PRT 的脉压峰值点,从而得到各个PRT 的峰值点相位,之后对峰值点相位进行拟合,提取出每个PRT 的随机相位同步误差,利用提取的随机相位同步误差对场景回波的相位逐PRT 进行补偿,从而减小了随机相位同步误差,实现精同步。
3 多通道外辐射源前视SAR 接收机系统测试及外场实验结果
为了验证多通道外辐射源前视SAR 接收机系统的实用性,在实验室环境下进行测试。测试方法如下:使用一台Ku 波段信号源作为发射机,分别输出多个频率步进的正弦信号,将信号通过射频线缆馈送至一个喇叭天线,喇叭天线正对接收机的4 个回波射频模块。回波射频模块接收到信号后,对信号进行放大和下变频处理,下变频本振信号由飞控(地面控制站)输入的参数控制,输出信号的中心频率固定。射频模块将中频信号传输至数字分机的存储器。即输入信号为:
其中,f0是输入信号起始频率,Δf为频率步进量,n为输入的单频点信号个数,φ0为输入信号的初始相位。
输出信号为:
其中,A为输出增益,fI为输出中频。
读取存储器中的数据文件,对数据进行FFT 处理,检验数据文件是否包含喇叭天线辐射出的正弦信号。五通道的数据处理结果如图6所示。
通道一和通道五都显示出频率步进单频点正弦信号的FFT 谱线,表明系统正确接收到了来自信号源的外辐射信号,系统工作正常,表明系统具有接收大带宽信号的能力,验证了系统设计和实现的正确性。
在连云港海滨城区开展实测实验,发射平台选用无人机载非合作发射机,接收机采用上述自主研发的多通道接收机原理样机。成像场景位于城区,主要包含了几个十字路口,一些建筑物,并人工放置了一个转发器作为强散射点。实验参数如下表2所示。
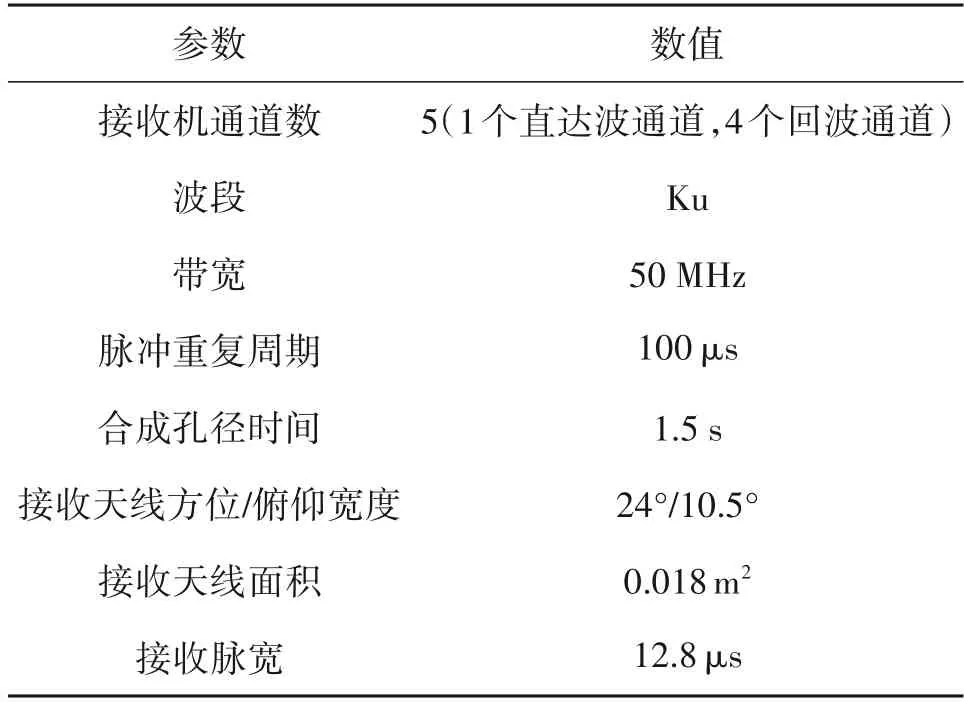
表2 实验参数Tab.2 Parameters of the experiment
外场实验开展方案如下图7所示。多通道接收机静止放置在一座小山顶上,位于目标场景的东南方向,距离场景中心的作用距离约5 km。外辐射源发射机在目标场景的北边飞行。
四通道合成后的外辐射源前视成像结果如下图8所示。从成像结果可以较为清晰地看到成像场景内自然景物的轮廓信息,比如图像中偏左侧存在一些较强的散射点,是十字路口和一些建筑物形成的,转发器位于十字路口的左侧边缘处,是成像场景内的最强散射点。转发器十字路口右侧中间位置还有一个十字路口,右侧有一条道路,与光学图像中场景的分布情况能够对应上。前视成像结果的成像幅宽达到了1 km,体现了多通道体制对于成像幅宽的提升效果。
4 结论
为了进一步拓展双基地SAR 系统的应用潜力,本文设计了一种小型化的外辐射源多通道前视SAR 接收机系统,阐述了收发时频同步精度指标和同步方案,完成了系统集成与测试,开展外辐射源多通道前视双基地SAR 外场实验,获取了多通道合成的实测前视成像结果,验证了接收机系统的实用性。后续还将开展外辐射源前视多通道SAR 运动补偿、高分辨成像、抗干扰等方面的研究,进一步挖掘该系统的研究价值。
