测量机器人在地铁隧道自动化监测中的应用
2022-02-14姜信东
姜信东
(江西煤田地质局二二三地质队,江西鹰潭335000)
1 概述
随着测绘技术和各种精密测量仪器的发展,变形监测也出现了新的变革和发展。电脑型全站仪配合丰富的软件向全能型和智能型方向发展,形成了TPS(Totalstation Position System)系统。带电动马达驱动和程序控制的TPS 系统结合激光、通讯及CCD 技术,可以实现测量的全自动化,集自动目标识别、自动照准、自动测角、自动测距、自动跟踪目标、自动记录于一体的测量系统,称为测量机器人。测量机器人超级目标捕捉系统驱动全站仪快速照准棱镜所在方位,并对目标实施高精度的自动照准和测量。获取角度、距离、三维坐标及影响等信息,进而得到物体的形态及其随时间的变化。
2 工程概况
华联宝安27区旧改项目位于深圳市宝安27区,拟建场地南侧用地红线距离地铁环中线左侧地铁隧道距离约20.5m,基坑开挖深度约8~16.9m;按设计要求在基坑开挖施工开始对地铁五号线(环中线)“洪浪北站”至“灵芝站”之间的地铁隧道及轨道进行变形监测,以保证地铁正常运营和安全及旧改项目的顺利进行。
3 执行标准
(1)《工程测量规范》(GB 50026-2007);
(2)《建筑变形测量规范》(JGJ 8-2007);
(3)《城市轨道交通工程测量规范》(GB 50308-2008);
(4)《深圳城市轨道交通地下工程监测技术规范》,深圳市地铁集团有限公司,2010年12月。
4 监测内容及变形监测网布设
4.1 监测内容
根据本工程设计文件及相关技术要求,在受基坑工程影响的地铁五号线(灵芝站至洪浪北站)隧道左线内对隧道拱顶沉降、水平位移位、地铁轨道沉降及隧道曲率变化进行监测。
4.2 变形监测网布设
(1)工作基站设置,监测工作基站设置在隧道侧面墙壁上,支撑托架长度不超过相应的车辆限界和设备限界,一般伸出长度大约为400mm,在监测工作过程中,定期检查工作基点的稳定性,保证后续工作的顺利进行。
(2)变形监测点的布设,按设计要求,监测点的布设按旧改项目项目基坑相对应范围内每隔10m布置一个监测断面,每个监测断面内由1个隧道拱顶沉降点、2个隧道水平位移点和2个轨道沉降监测点(隧道曲率监测点用左侧轨道监测点作为曲率监测点),共23个监测断面。
工作基站及隧道监测断面布点如图1所示。
5 监测方法及仪器参数设置
(1)本项目使用仪器为SOKKIA全站仪,AutoMoS自动化变形监测系统。采用固定式全自动三维同步监测方法进行持续监测。
整个系统由测量机器人监测台、供电、控制、计算、通信及反射凌镜组成,并配备专门软件。
(2)仪器参数设置:主要是对基本参数、自动测量参数、自动测量、测量数据处理、成果输出等参数进行设置。
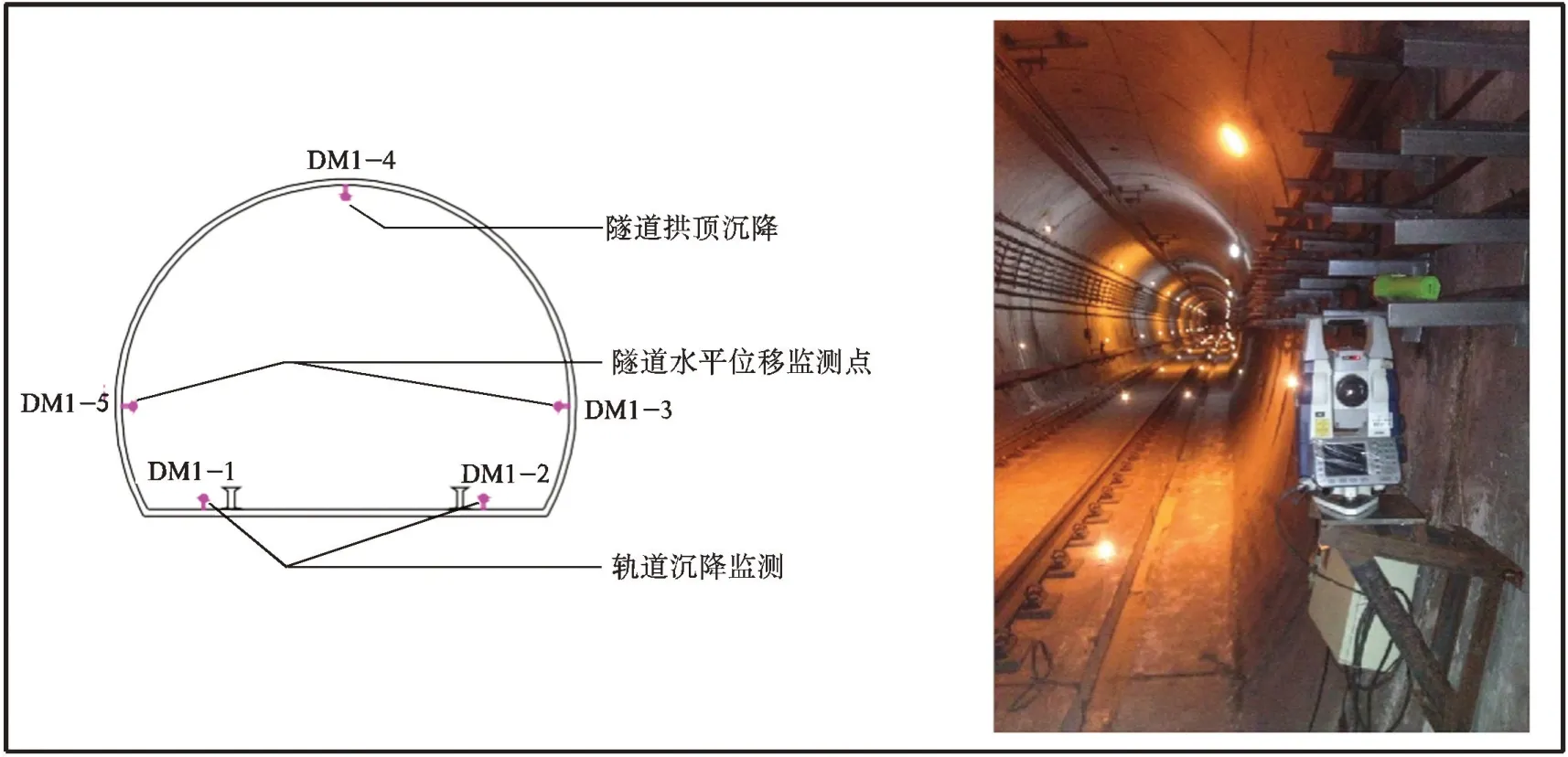
图1 工作基站及隧道监测断面布点图
6 监测频率及预警值
6.1 监测频率
监测频率:土方开挖过程中,每天观测3 次;桩基施工期间每天观测5 次;至施工完成变形稳定止。
6.2 监测预警值
(1)隧道结构安全保护第三方监测控制指标:
①隧道结构绝对沉降量及水平位移量不大于5mm(包括各种加载和卸载的最终位移量);
②道床(参考轨道变形指标)竖向变形小于±2mm,两轨道横向高差小于2mm。
③隧道的相对变曲不大于1/5000,隧道纵向变形曲线的曲率半径R≥30000m。
④由于打桩振动、爆炸产生的震动隧道引起的峰值速度不大于1.20cm/s(对连续性的震动控制指标应按50%甚至更为严格控制)。
(2)监测警戒值:第三方监测的实际变形警戒值为最大允许变形值的50%,报警值为最大变形允许值80%。
当出现大于警戒值和报警值时,系统将自动通过手机短信的方式立即向申请人、施工单位、城市轨道交通公司、城市轨道交通运营管理办公室发出预警及报警。以便采取相关措施保证隧道结构安全。
7 监测数据处理
(1)数据采集、整理。现场监测仪器(全站仪)自动数据采集,并将数据自动传输到数据库管理系统。
(2)数据分析及预报。自动监测系统根据全站仪量测数据绘制测点时间位移曲线散点图和距离位移曲线散点图,进行实测变形量与预报值比较。最终输出成果表及位移量—时间曲线图,以便对工程的安全状态和应采取的措施进行评估决策。
8 技术保证措施
8.1 监测方法
采用固定式全自动三维同步监测方法进行持续监测。即固定测站仪器,固定监测目标凌镜、监测人员、监测时间。对于相关的数据、信息,做到实时采集、处理、传输、分析和预警,减少误差提高精度。
8.2 监测仪器的定期维护
定期对测量机器人进行维护保养。减少水汽、灰尘及地铁运行对仪器的影响,提高测量机器人的工作效率和保证地铁隧道监测的精度。
8.3 监测系统功能设计
根据监测精度要求及测量仪器的特点针对性地进行设置。
(1)建立项目进行初始化设置:以工程形式进行项目管理,便于监测过程中相关数据的保存。系统初始化设置实现测量机器人与计算机通讯串口通讯参数一致。
(2)对所有监测目标点进行首次人工测量,获取目标点的三维位置信息,便于后期控制测量机器人完成自动测量。
(3)自动测量:设置自动观测时间段,以控制测了机器人在指定的时间段完成自动观测。
(4)智能处理:遮挡处理与超限处理。
(5)数据处理:实时多重差分改正,最大限度地消除或减弱多种误差因素。
(6)变形趋势实时多态图解显示,可以同时显示断面上的所有点的位移量。
(7)变形量超限时自动报警。
9 结论
(1)自动化变形监测测量系统能够替代传统测量方法对地铁隧道快速完成位移与沉降等变形监测。
(2)简化了气象等附加设备,用实时差分式的测量方案,最大限度地消除或减弱多种误差因素。系统在计算机的控制下实现全自动、高精度的变形监测。
(3)实时进行数据采集、数据处理、数据分析、报表输出及提供图形等。
(4)实现手机短信自动报警,便于采取相关措施保障隧道结构及地铁运营安全。
