大型桥梁三维激光扫描测量误差分析与控制
2022-02-12陈勇吴涛陈朝辉
陈勇 吴涛 陈朝辉
1.上海市建筑科学研究院有限公司,上海 200032;2.中国铁路上海局集团有限公司,上海 200071
大型跨铁路、跨江桥梁结构的测量工作包括高墩竖直度检测、斜拉桥和悬索桥主塔的竖直度测量以及悬索桥主缆的线形测量、拱桥的拱肋线形测量等。考虑该类结构大多存在高度高、难接触、难到达等特点,使用传统接触式测量方法难以实施,甚至无法完成[1]。目前常用的全站仪、水准仪在测量此类桥梁结构时不仅效率低、作业危险系数高,而且测点离散性较高,无法完整展现桥梁整体线形状况[2]。
与传统的桥梁变形检测手段相比,三维激光扫描技术无需事先埋设监测传感器,不需要接触待测结构就能够全自动快速清晰地获取被扫描结构整体或局部连续的密集点数据,从而不断逼近目标的原型,最后达到三维重建的目的[3]。近年来,三维激光扫描技术在国内工程中逐渐开始应用。文献[4-5]将三维激光扫描技术应用于地铁隧道变形监测中,验证了移动式三维激光扫描手段应用于隧道变形监测中的优势。文献[6]证明了三维激光扫描技术在城市地下空间测量中的应用优势,如地下结构映射、地下空洞保护层厚度测量、地下设施调查等。文献[7]将三维激光扫描技术应用于斜坡岩体的测绘中,建立了斜坡岩体三维结构面网络模型。文献[8-9]将三维激光扫描技术应用于地质测绘和国土测绘领域,显著提高了测量的效率和质量。文献[10-11]将三维激光扫描技术应用于建筑立面图测量以及古建筑测绘,测量成果和精度均可以满足项目需求。文献[12]探索三维激光扫描技术在超高层钢结构变形监测中的应用,并与BIM技术相结合,运用于施工过程和后期运营阶段变形监测的BIM管理模型中。文献[13]应用三维激光扫描技术对斜拉桥桥塔的偏位进行了为期半年的监测,完善了斜拉桥桥塔的健康监测手段。
受三维激光扫描仪本身的限制,且扫描过程中外界环境因素可能对扫描目标有遮挡,获取的原始数据中存在大量的粗差、错误及无用的信息,测量结果的精度无法满足使用要求[14]。本文基于三维激光扫描技术,分析误差来源,从测角和测距两方面对三维激光扫描结果引起的误差进行试验研究。通过加密控制点以及控制网拼接的方法对大型桥梁三维激光扫描的测试误差控制进行分析,为今后三维激光扫描技术的应用提供参考。
1 三维激光扫描误差的来源
三维激光扫描系统作为多轴的复杂测量系统,常为伺服控制系统,主要用于完成高精度的复杂测量任务,因此对三维激光扫描仪的测量精度要求较高。影响三维激光扫描精度的因素有很多,根据误差来源可分为三类:外界环境条件引起的误差、目标物体反射面引起的误差和仪器误差[15]。
1)外界环境条件引起的误差包括环境温度、环境湿度、大气折射、大气漩涡、大气灰尘、障碍物、目标的背景等。一般由仪器使用者通过选择适当的工作环境和工作时间来减少该类误差。
2)目标物体反射面引起的误差主要包括目标大小、表面形状、材质、反射面曲率等。目前在实际工作中只能通过了解其影响规律尽量避免。
3)三维激光扫描仪本身的误差包括测距、测角、激光束的散射效应等诸多因素,但这些因素对扫描观测的影响结果均表现在测距和测角两方面[16]。对于大型桥梁的数据采集,多站拼接引起的误差是必须要考虑的。由于光线沿直线传播,单个视角只能获取物体表面的部分数据。为获取物体表面的完整数据,需要从不同视角对物体进行多次测量,即设置多个测站进行扫描测量。常用的靶标拼接方法是以某一测站的坐标系为基准,再将其他各站的坐标系都转换到该站的坐标系下,从而得到目标完整的点模型。缺点是多站拼接会造成各测站误差的累积和传递,造成误差放大。
2 三维激光扫描误差分析
三维激光扫描技术获取的数据是相关点的三维坐标,而三维坐标是与测距和测角相关的量[17]。考虑到仪器本身在测距及测角方面的误差,实际测量中很难将该类误差完全排除,因此需要对测距及测角与误差的关系进行试验研究。本文采用的仪器有Leica scan station C103D激光扫描仪以及Leica TS30全站仪,建模软件采用Lecia Cyclone点云数据处理软件。
2.1 测角误差
扫描角度的影响包括水平角度和竖直角度测量的影响。扫描角度引起的误差受扫描镜的镜面平面角误差、扫描镜转动的微小震动、扫描电机的非均匀转动控制误差等因素的综合影响[18]。
利用全站仪配合三维激光扫描仪,选取水平测角20°~90°进行试验研究。目标物为已知的矩形物体,测距为45 m,见图1。改变水平扫描的角度拟合出矩形物体,并与已知的矩形物体进行对比得出拟合误差,共进行两次试验。绘制测角和测量误差之间的关系曲线,见图2。可知,当测角小于45°时,测角越小测量误差越大,测量误差随测角变化而急剧变化;当测角大于45°时,测量误差随测角的变化较为平稳。因此,在实际工程扫描中,宜选择45°~90°的测角以减少测量误差。

图1 测角误差示意

图2 测角和拟合误差的关系曲线
2.2 测距误差
激光测距信号处理的各个环节都会带来一定的误差,特别是光学电子电路中光脉冲回波信号处理时引起的误差,主要包括扫描仪计时的系统误差和测距技术中不确定间隔的缺陷引起的误差。采用球形靶标对测量距离引起的误差进行分析。在12~106 m的测距范围内,利用三维激光扫描仪测量球形靶标中心坐标两次,每次测量设置10个测距,并与全站仪测得的结果进行对比,得到测距和测量误差的关系曲线,见图3。
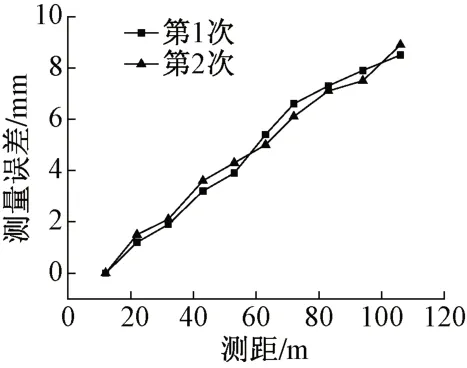
图3 测距和测量误差的关系曲线
由图3可知,测量误差随测距的增加而增大,50 m测距范围内测量误差小于4 mm,当测距大于100 m时,测量误差达到8 mm以上。大型跨江桥梁的测距相对较大,因此在实际工程中可以通过先分站扫描再点云拼接的方式来减小测距带来的误差,也可以通过点云加密来提高远距离扫描的拟合精度。
3 大型桥梁误差控制方法研究
由于大型跨江桥梁的测量设站距离一般比较远,采用三维激光扫描技术进行非接触式测量最关键的问题是控制测距以及多站拼接产生的误差。因此,提出远距离点云加密和布设控制网的方法进行点云拼接,对三维扫描误差进行控制,实现三维激光扫描技术在大型桥梁非接触测量中的应用。
3.1 加密点云控制误差
对于大型桥梁,受现场条件的限制,必须进行较远距离的扫描测试,而测量误差随扫描测距的增加而增大,测距越大得到的点云越稀疏,相应的噪点越多。因此,采用远距离采集的三维点云图进行三维建模时误差较大。通过分析不同测距、加密次数下球形靶标的测量误差,得到不同测距下加密次数与测量误差之间的关系。
利用三维激光扫描仪在30、51、83、103 m测距下分别测量8次,获得靶标坐标位置,并将测量结果与全站仪测量结果进行对比得到测量误差,见图4。
由图4可知:①当测距为30 m时,通过多次点云加密对测量的精度基本没有影响;②当测距为51 m时,通过多次扫描加密点云在一定程度上可以提高测量的精度,但加密次数达到4次以上时测量精度基本不变;③当测距为83、103 m时,通过多次扫描加密点云可以提高测量的精度,但加密次数达到6次以上时测量精度基本不变。这说明测距越大,通过增加点云来提高测量精度的效果越好,但不是扫描次数越多测量精度提高得越多,在达到一定的扫描次数后,再增加点云密度基本对测量精度没有影响。因此,在大型跨江桥梁中,可以通过一站多次扫描加密点云来提高远距离扫描测量精度,但要选择合理的加密次数,保证测量效率。
3.2 采用控制测量法减少拼接误差
在实际工程应用中三维激光扫描技术受测距和视线条件的影响,无法一次扫描进行建模。对于结构庞大的跨江桥梁,可能要进行10次以上的扫描拼接。目前,使用靶标拼接方法的误差来源有靶标拟合误差、坐标转换误差、多站拼接累积误差。为了提高多站拼接的精度,提高测量效率,提出控制网拼接方法。靶标布设完成后,利用高精度全站仪对控制网进行观测、平差、解算,在控制网基准下对靶标坐标进行测量,测量靶标中心十字丝坐标,测量完成后进行扫描拼接,从而消除多站拼接的累积误差以及坐标转换误差,提高测量效率。
以一座悬索桥为例,对其主缆线形进行扫描。该桥梁主跨为1092 m,远远超过扫描仪的扫描距离,需将主跨分段扫描并进行各站拼接。由于悬索桥整体刚度弱,跨中区域在风荷载等环境荷载作用下变形量较大,因此将跨中区域划分3段,每段200 m,其余区域划分6段,每段80 m。每段最少布置2个靶标,全桥共计18个靶标。横桥向靶标分别布置在桥面两侧的检修道内,桥梁测点布置见图5。扫描仪放置在每个纵桥向测区中间位置,两侧扫描距离均在55 m左右,扫描工作选择在夜间列车停运、风速较小、温度稳定的时段。主缆截面为圆形,以实测点云数据建立圆柱体模型,通过Lecia Cyclone点云数据处理软件自动获取截面的圆心特征点,通过特征点绘制成桥主缆的线形图。主缆的三维点云图见图6。
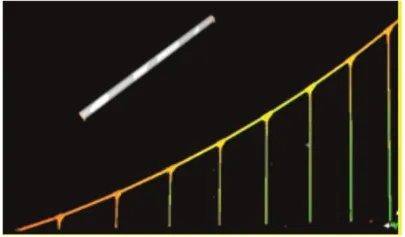
图6 主缆的三维点云图
主缆的测量结果显示主缆线形平顺性较好,线形无明显波动,两侧主缆线形基本一致。同时采用全站仪对主缆线形进行测试,测点在主缆与吊索交接中心位置,并将三维激光扫描仪与全站仪线形测量结果进行对比,发现两者最大误差为7.2 mm,满足精度要求。
采用控制网拼接时各个测站之间是独立的,拼接点云数据时,由于全站仪形成的控制网精度较高,没有多站误差的累积;靶标拟合误差的最大来源是距离。由于本次试验采用分区域观测,通过合理控制距离,误差较小。控制网拼接避免了后期坐标转换的问题。采用这种方式扫描,误差可控制在毫米级。同时,可以通过增加各站的靶标数来增加拼接精度。
三维扫描运用于实际工程时,单测站的精度基本可以满足要求,更大的误差来源于多测站拼接时的累积误差,采用控制网拼接可以有效地减少累积误差。优点是对于通视的要求相对较低,便于现场操作;不需要扫描相邻测区的靶标,避免因靶标距离过远带来的测距误差。因此,采用全站仪布设控制网,可直接纳入城市坐标系,便于点云数据的使用。
4 应用实例
拱肋是拱桥的主要受力构件,桥梁恒载和活载均通过吊杆或立柱传递给拱圈,拱肋线形的变化将影响整个拱桥的受力体系。因此,拱桥拱轴线的测量是拱桥施工、养护、改造、监测的重要环节。由于拱桥的结构特点,很难对其进行简便、快捷和精确的测量。因此,以上海市浦东一座拱桥为例,利用三维激光扫描技术对拱肋线形进行精确测量。该拱桥为一座下承式钢管混凝土拱桥,跨径97 m,属于大型跨江桥梁,拱肋截面为哑铃形,线形采用悬链线。选择Leica HDS Scan Station C10三维激光扫描仪进行拱肋线形的数据采集。根据三维激光扫描误差控制的试验研究结果,采用如下方法进行测量。
1)为了减小测距和拼接带来的误差,在桥梁周边布置4个工作基点作为观测点,在每个工作基点附近设置2个控制点,共设置了8个控制点,见图7;在每个控制点布置1个靶标。利用全站仪进行控制网的布设,通过控制网进行测站的精确拼接。

图7 控制网布设位置
2)根据测角和测量误差的关系,在每个测站的有效扫描区域扫描时,水平扫描角度控制在40°~60°。
3)根据加密次数和测量误差的关系,对距离较远的位置通过4次扫描来加密点云以减少测量误差。通过裁剪和粗差剔除,对扫描得到的原始点云数据进行优化。拱肋截面为哑铃形,通过截面三维建模获取截面特征点来拟合得到实际拱轴线。特征点选择拱肋与吊杆交接位置的中心。
通过点云建模处理得到南北两侧主拱肋的线形,见图8。可知,南北两侧拱肋线形基本一致。采用全站仪对该桥拱肋线形进行测试,测点设置在吊杆与拱肋交接中心位置,并将三维扫描仪和全站仪线形测量结果进行对比,见图9。可知,两者最大误差为3.8 mm,满足实际工程应用精度的要求。

图8 实测拱桥拱肋的线形

图9 三维激光扫描仪测量结果和全站仪测量结果对比
5 结论
1)通过加密测点、减小测距、优化测角、测站控制等措施可显著减少三维扫描测量误差,满足工程应用的要求。
2)测角、测量距离均与测量误差存在一定关系,实际工程中可以通过调整扫描角度以及缩短测距来减少测量误差。
3)对于大型桥梁的远距离扫描,可以通过一站多次扫描加密点云的方法来提高测量精度,但要选择合理的加密次数,以保证测量效率。
4)三维扫描运用于实际工程中时,单测站的精度基本可以满足要求,更大的误差来源于多测站拼接时的累积误差。采用控制网拼接可以有效减少累积误差,达到实际工程需要。
