基于飞参数据的无人机飞行训练风险评估关键技术研究*
2022-02-12王凤芹韩秋枫
杜 晶 王凤芹 韩秋枫
(海军航空大学 烟台 264001)
1 引言
无人驾驶航空器(Unmanned Aircraft,UA),是一种通过遥控设备进行操控或搭载自主飞行系统的航空器,也称遥控驾驶航空器(Remotely Piloted Aircraft,RPA),一般又简称为“无人机”[1~2]。无人机不仅在民用航空领域发挥着广泛的作用,而且,它在军事领域也发挥着不可替代的作用。无人机飞行训练是我军无人机人员培养的重要步骤,也是提升无人机使用效能的关键环节。
无人机飞行训练安全风险评估是其进入空域安全运行的先决条件,是相关适航规章建立的支撑,是满足在复杂环境下无人机飞行安全的需要。无人机的安全飞行影响着军事发展和人民的生命财产安全,对其进行科学合理的风险评估是有着重大意义的,是推动无人机领域未来进一步发展的关键所在。
随着现代科学技术的迅速发展,以人工智能、网络通信以及数据挖掘为代表的信息技术获得了突飞猛进的发展。信息化、数字化、自动化早已渗透到航空业的每一个方面[3~4]。以飞行参数监控和飞行参数分析为主的飞行训练客观评估方式也已经得到了航空领域的认可,并开展了应用研究。飞行参数数据简称为飞参数据,通常记录有关飞机位置参数、飞机姿态参数、发动机状态参数、飞机操纵参数、飞机操纵面的偏转角等较为全面的飞行状态信息[5]。将飞参数据与智能数据分析方法结合,不但可以确定无人机飞行过程中的风险源,而且可以在定量分析风险产生的原因方面发挥作用,最终提升无人机在使用中的效能。
目前,无人机训练体系已经较为完善,积累了大量的飞行数据,然而,由于飞行数据检索效率低下,数据分析手段与能力不足等问题,导致数据在无人机飞行训练风险评估方面的效能没有得到充分发挥。
本文主要研究对象为经过标准化采集、录入、整理的飞行训练信息数据,针对风险评估中的两个关键问题进行研究:
1)飞行风险源分析。对飞行训练风险的主要产生原因特别是内部原因进行归纳,总结出机载电子系统风险是导致风险发生的主要原因之一。
2)机载电子设备风险预测。利用多传感器采集和预处理后的飞参数据作为驱动数据,结合多变量故障融合驱动模型作为数据挖掘算法,进行机载电子系统风险预测。
2 风险源分析
无人机训练风险源主要分为两大类:一是外部原因,主要指天气环境影响、其它设备或人为对无人机的干扰;二是内部原因,主要包括无人飞行器分系统、测控与信息传输分系统等设备故障、软件故障[6~7]。内外因共同作用,构成无人机飞行训练主要风险。如图1所示。

图1 无人机飞行训练主要风险
内部原因中,除了低余度配置方面导致的风险,无人机飞行器分系统风险发生的主要原因有机载电子系统飞行能力、内部各个系统的兼容性、使用材料的优劣等。其中,机载电子系统故障占绝大部分。风险发生的内部原因详细图解如图2所示。
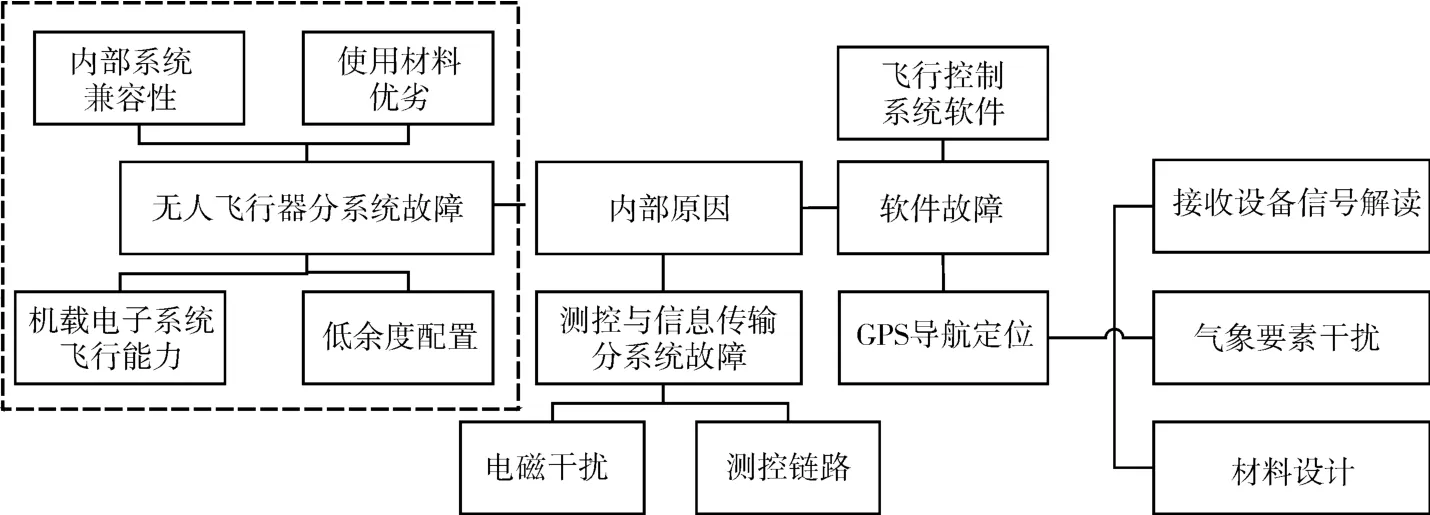
图2 风险内部原因详细图解
3 无人机机载电子系统故障预测
3.1 故障预测过程
无人机飞行训练时的机载电子系统传感器数据量与日剧增,超大数据量及数据复杂性导致利用传感器数据进行传统的电子系统定期检测维护方式已经不能满足要求,只有利用数据进行系统故障预测,利用预测结果进行合理保障,才能保障无人机正常训练及作战能力。
故障预测的步骤主要分为
1)数据的采集和预处理。协调高性能灵敏传感器之间高效工作,获取原始数据。将获取到的原始数据进行预处理,修补、剔除大量异常及不完整数据。
2)基于数据驱动的故障预测。利用前面采集和预处理后的数据作为驱动,结合多变量故障融合驱动预测模型作为数据挖掘算法,进行机载电子系统故障预测。
3.2 多变量故障融合驱动预测框架
在利用传感器获取电子系统各零部件原始数据,并对数据进行预处理后,利用多变量故障融合驱动进行风险预测的流程框架如图3所示。

图3 机载电子系统风险预测框架图
3.2.1 多变量模型训练及融合矩阵样本集的建立
多变量模型训练应当首先对预处理后的数据进行数据的归一化处理。统计数据为某无人机训练单位提供的在训无人机单次,不同时刻传感器收集的各部件参数,包括发动机引擎转速、缸体工作温度、油压、主桨转速、爬升速度等[8~10]。飞行训练过程中上千个部件并非都被监控,只有关键部件布置传感器,将监控数据实时传回地面接收站。
将历史探索风险比对数据形成故障库,再将故障数据库与监控数据进行数据与数据间复杂关系比对形成参数库。
在进行故障预测过程中,由于各类数据的度量单位不同及由此导致的各种数据溢出性错误,致使训练时间和精度降低,无法进行数据相关性分析,根据式(1)对飞参样本数据进行[0,1]区间的归一化处理[11~13],截取部分参数归一化后的数据如表1所示。依据相关准则,对不同的参数信息进行归一化处理,将处理后的数据进行多变量模型训练,对训练后的样本数据建立融合矩阵样本集,再利用多变量故障融合算法进行样本训练,准确地评估机载电子系统风险。
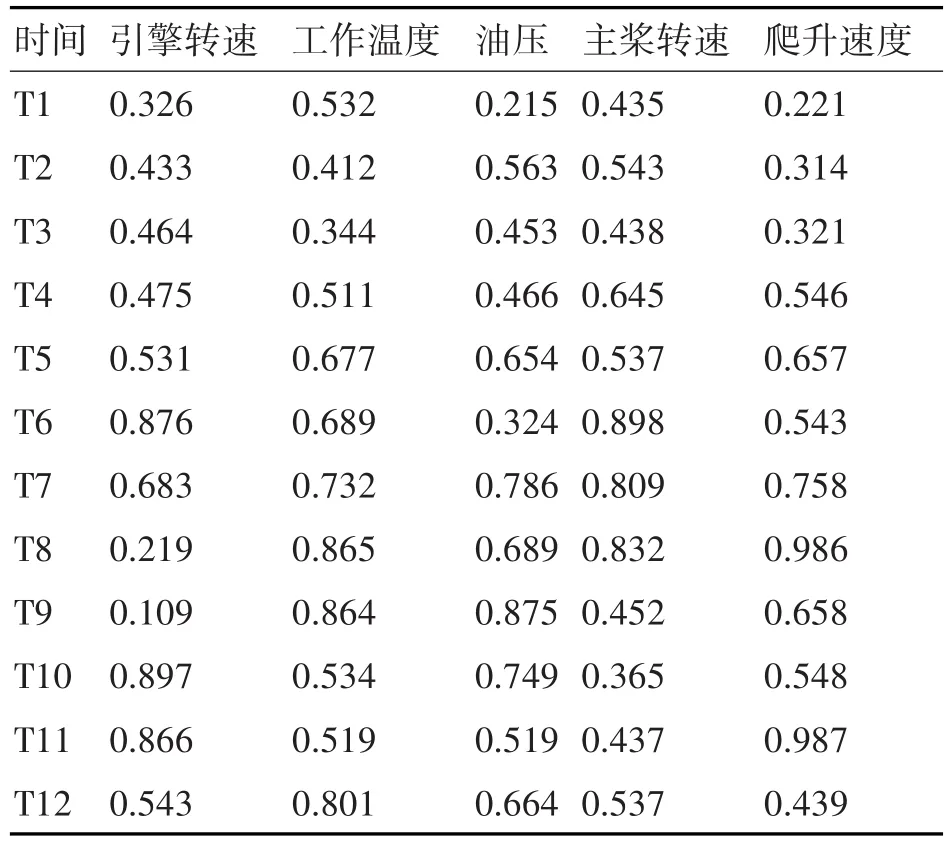
表1 机载电子系统一次飞行训练参数数据归一化统计表
3.2.2 融合矩阵单变量与飞行风险数据相关性分析
通过构造融合矩阵得到发动机单个飞行参数数据与飞行训练风险发生相关系数不同,涉及到的不同矩阵变量与风险发生相关性如图4所示。

图4 矩阵变量与风险发生相关性图
单一变量监控对于飞行训练风险发生的确定是相当困难的,因此,将发动机不同传感器采集的各类历史数据进行特征提取、依据相关准则将预测值作为融合矩阵的特征值,与多变量模型训练后的融合矩阵进行融合,构成新的融合矩阵。再采用多变量故障融合算法进行样本训练,得到最终的风险预测结果。
3.2.3 模型有效性评价
根据我国目前常用的四种不同型号机载电子系统传感器飞参样本数据与本文所研究的算法结合,利用多变量故障融合驱动模型与飞参数结合进行机载电子系统风险评价,得到目前国内最先进的几种不同无人机训练机的风险相关信息值如表2所示。

表2 不同型号无人机风险评价表
3.3 决策支持
从风险评价表可以看出,融合预测技术能准确地对无人机机载电子系统做出合理的健康评估并预测剩余寿命。目前我国最先进的几种无人机型号风险值较高,迫切要求我们未来能够更加充分合理地利用飞参数据,结合其它风险因素,不断改进预测算法,合理地做出无人机保障方案、训练计划、效能评估、质量跟踪,以保障部队的无人机作战训练要求,提高训练质量。
4 结语
本文从无人机飞行风险产生的原因入手,分析了导致无人机飞行风险的内外因。重点分析了利用飞参数据,构建基于多变量故障融合驱动预测框架,对机载电子设备风险预测的关键技术。主要包括多变量模型训练及融合矩阵样本集的建立、融合矩阵单变量与飞行风险数据相关性分析等方面,指出飞参数据在无人机训练风险预测方面的巨大作用,为未来如何利用飞参数据提高无人机作战效能指明方向。
