基于二维Otsu的舰船目标图像分割方法*
2022-02-12余扬
余 扬
(南部战区海军参谋部作战勤务保障大队 湛江 524000)
1 引言
原始 Otsu[1](最大类间方差(Maximum between-class variance))以一维直方图图像的背景与目标间的方差来确定最佳分割阈值,没有考虑像素间的空间关系,据此,将Otsu方法扩展为二维[2~3]直方图进行研究,二维直方图图像的分割质量虽好,但却增加了算法的时间开销,因此,降低Otsu算法的时间复杂度,提高其最佳阈值的计算速度成为当前研究的热点问题。
为克服算法的计算量大的问题,Wang等[4]提出了一种自适应的二维Otsu阈值分割方法,该方法通过迭代的方式大大提高了算法的技术速度;Jun等[5]研究提出了一种适用于SAR图像分割的改进Otsu算法;基于积分图像处理技巧,Lang等[6]设计了一种快速Otsu阈值分割方法;此外,李等[7]通过对图像分割算法的研究,提出了基于模糊判决的Otsu阈值选取算法,该算法的求取结果更接近实际最佳的分割阈值。
2 基于局部盒滤波的Otsu阈值分割
为提高二维Otsu方法阈值的计算速度,研究采用积分图像的处理方法[8],以及局部网格盒滤波技术,提出一种高效的阈值分割算法。
设定图像I(x,y)的尺寸大小为M×N,像素灰度级记做L,假设3×3邻域内,像素点的平滑图像为G(x,y)。又假设图像I(x,y)的某一像素的灰度值i与其邻域的灰度均值j均出现的次数为fi,j,则联合概率密度为

假设从矩形L×L中任取一点为pi,j,计算其二维直方图,如图1(a)所示。给定任一阈值(s,t),则直线对f=s,g=t将该二维直方图划分成4个区域,如图1(b)所示:A0,A1分别表示目标和背景,A2,A3分别表示边缘和噪声。

图1 原始二维Otsu方法
假设A0、A1分别代表目标区域和背景区域,其出现的概率分别表示为ω0、ω1,那么有:
同时,区域A0、A1的灰度均值矢量记为μ0、μ1,它们的灰度均值μ表示为


假设图1(b)中区域A2和A3上的所有的概率均忽略不计,亦即ω0+ω1≈1,则类间方差BCV可定义为

BCV取最大值时计算所得的二维阈值即为最佳阈值,即:

综上,研究给出基于积分图像处理的Otsu分割方法。
原始图像I(x,y)的积分图像记为II(x,y),由文献[9]可得:

根据图2(a)所示的积分图像[10],(x,y)为阴影区域的像素的灰度和。记图2(b)所示的像素灰度和为S,则:

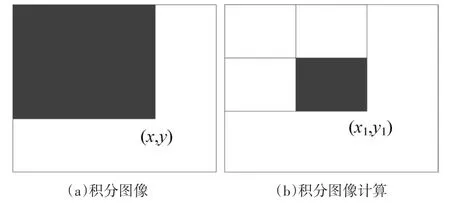
图2 积分图像示计算意图
结合积分图像和盒滤波方法计算的高效性,研究提出基于盒滤波处理技巧的二维Otsu阈值分割算法。
为方便后续处理,给出如下的网格的定义。
假设某一数据区间为R,共有d维,现将第i维划分成ni个子小段,记子这些子小段构成的区间为Ri,则区间R被笛卡尔集(R1,R2,…,Rl) 划分为n1×n2×…×nl个网格 ,区间M被划分为(m1,m2,…,ml) ,如图3所示。

图3 基于局部网格技术的区域划分示意图
研究采用由整体到局部的研究思路,步骤如下。
第一步:对原始图像的对应的二维直方图进行区域划分,并将每个区域视为一个像素点,对阈值完成初步计算;
第二步:根据第一步计算结果确定阈值所在区域;
第三步:在第二步确定的区域内建立阈值求解模型。

3 时间复杂度分析

4 实验分析
实验选用了不同港口下、不同分辨率的光学遥感图像。如图4所示。
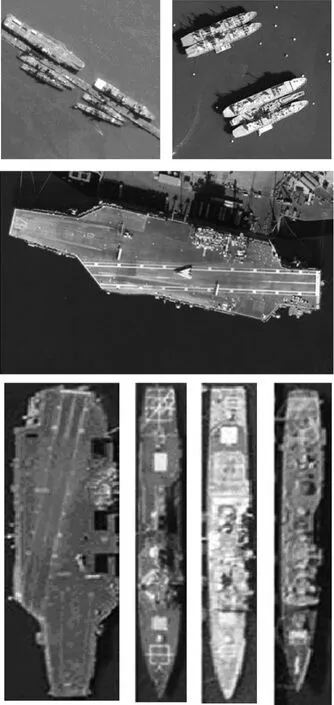
图4 原始目标图像
从图5可以看出,本文算法的分割结果基本完整反映真实情况,计算过程简单,算法的运行速度快。

图5 目标图像分割效果图
5 结语
为提高二维Otsu算法阈值分割计算的高效性,研究提出了基于局部网络区域划分技术的二维Otsu阈值分割算法。算法运用采用网格技术,采用先整体到局部的研究思想,实现了阈值的快速计算,仿真实验结果表明,该算法真实可行,为后续海战场舰船目标的检测和识别提供了技术基础。
