基于线性回归理论的智能交通算法
2022-02-10李志鹏
李志鹏
(江西财经大学,江西 南昌 330013)
0 引 言
随着经济的快速发展,汽车越来越多,交通压力越来越大,尤其是大城市上下班高峰期,在某些重要的交通路口,时常出现横、纵向车交叉在一起的情况,造成长时间的拥堵。基于上述问题,本文提出了一种基于线性回归理论的智能交通分析算法。若出现拥堵情况,可将当前状况通过车载电视或者收音机播放给汽车听众,便于汽车司机及时做出处理。
智能交通算法可较好地解决交通拥堵情况,减少人工干预,很多人也对智能交通提出了不同的见解。罗素瑾提出了一种基于静态图片或动态视频检测目标对象的方法[1],卢东祥分析了静态与动态路径规划算法的优劣势,用路径规划算法的未来研究趋势及方法[2],郭洋利用数据挖掘、优化和改进交通流量预测算法[3],徐成对交通拥堵问题提出了车流量检测的不定顺序控制算法研究[4]。本文在线性回归理论的基础上设计算法,可改善交通拥堵问题,节省通行时间。
1 线性回归相关理论
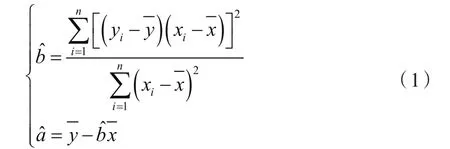
线性回归理论是基于一次函数的特征,找出两个变量之间的关系,通过数学方式解决实际问题。线性回归模型表达式为y=bx+a,其中,b为斜率参数,a为截距参数。对于n个数据点(x1,y1),(x2,y2),…,(xn,yn),通过式(1),计算出相应的斜率参数b^和截距参数a^[5-6]:
2 算法设计
以十字路口为例,对当前路口进行编号。随机挑选相向行驶的两个路口编号分别为1,2,另外相向行驶的两个路口编号分别为3,4。以正前方直行编号为1,左转编号为2。通过汽车计数器,检测当前行驶车道由红灯变绿灯期间的平均汽车数量,公交车和大货车均以普通汽车的两倍计数,计算当前各个车道的平均等待车数p,同时记录当前车道由红灯变绿灯等待的时间Td。将Td均分成6份,0-1/6Td的车辆作为当前行驶车道第1个纵坐标,0-2/6Td的总车辆作为当前行驶车道第2个纵坐标,0-3/6Td的总车辆作为当前行驶车道第3个纵坐标,以此类推,可得当前行驶车道第4,5,6个纵坐标。
将 1,2,3,4,5,6作为相应的横坐标,用yuvw作为相应的纵坐标,其中,u=1,2,3,4表示路口编号,v=1,2表示行驶方式,w表示0-t/6Td(t=1,2,3,4,5,6)的总车辆。如路口编号1的正前方直行形成6个坐标分别为(1,y111),(2,y112),(3,y113),(4,y114),(5,y115),(6,y116),路口编号1的左转形成的6个坐标分别为(1,y121),(2,y122),(3,y123),(4,y124),(5,y125),(6,y126)。
同理,路口编号分别为2,3,4的正前方直行和左转形成的坐标分别为:(1,y211),(2,y212),(3,y213),(4,y214),(5,y215),(6,y216);(1,y221),(2,y222),(3,y223),(4,y224),(5,y225),(6,y226);(1,y311),(2,y312),(3,y313),(4,y314),(5,y315),(6,y316);(1,y321),(2,y322),(3,y323),(4,y324),(5,y325),(6,y326);(1,y411),(2,y412),(3,y413),(4,y414),(5,y415),(6,y416);(1,y421),(2,y422),(3,y423),(4,y424),(5,y425),(6,y426)。
由式(1)计算路口编号1,2,3,4的斜率参数buv,其中,u=1,2,3,4表示路口编号,v=1,2表示行驶方式,如路口编号1的正前方行驶斜率参数为b11,左转斜率参数为b12。判断斜率参数buv,若求得对应的斜率参数b小于等于0,则呈现负相关,表示车辆少,不做处理,按照当前设置的红绿灯时间通行。如果斜率参数b大于0,则按以下步骤操作。
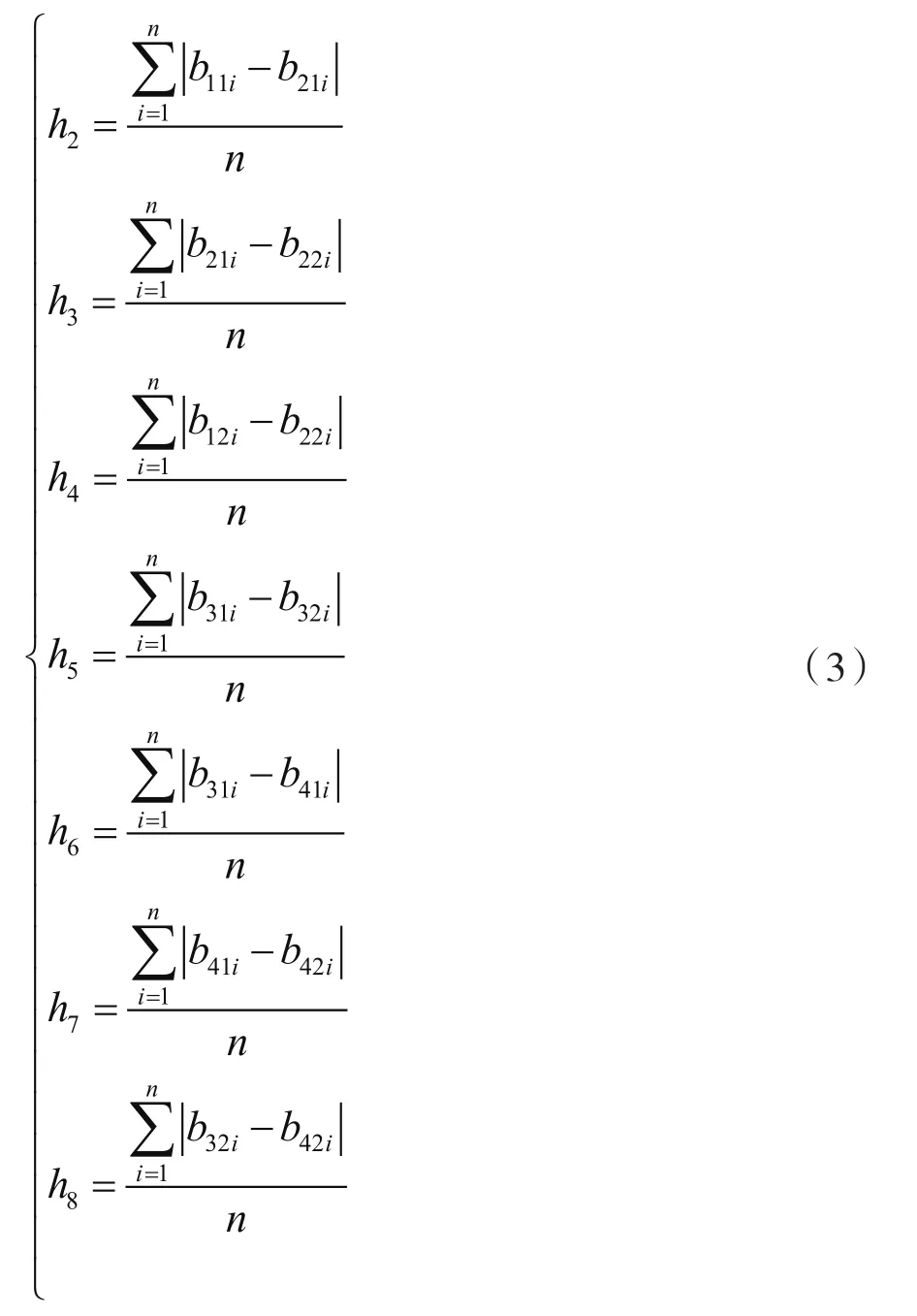
(1)判断n次等待的时间的buvn,n=1,2,3,…表示第n次,并按照式(2)求h1:

式中:b11i是编号为1的直行的第i(i=1,2,3,…,n)次斜率参数,b12i是编号为1的左转的第i次斜率参数。同理,按照式(3)分别求h2,h3,h4,h5,h6,h7,h8。
(2)比较hj(j=1,2,3,…,8)的大小,若h2+h4≤h1+h3,表明1,2号路口的直行车道的车辆数相近,1,2号路口的左转车道的车辆数相近,则1,2号路口直行车道同时开通,1,2号路口左转车道同时开通。若h2+h4>h1+h3,表明1,2号路口各自直行及左转车道车辆数均相近,则1号直行和左转同时开通,2号直行和左转同时开通;同理,若h6+h8≤h5+h7,则3,4号车道直行车道同时开通,3,4号左转车道同时开通。若h6+h8>h5+h7,则3号直行和左转同时开通,4号直行和左转同时开通。检查hj(j=1,2,3,…,8),如果发现其中某个hj(j=1,2,3,…,8)值过大,则告知交通部门,当前时间该行驶方式过于紧张,请及时处理。
(3)判断n次等待时间中pn(n=1,2,3,…)的增长值,如果pn(n=1,2,3,…)呈现增长趋势,则当前绿灯时间需要增加,需增加时间的计算公式为

式中:p1为当前计数的第1次等待对应车道车辆数平均值,pn为第n次等待对应车道车辆数平均值。为了表达方便,引入取整函数,如[1.02]=1,且以秒为单位,如果T+持续增加,则当前绿灯通行时间需设定上限值Tu,并通知交通部门,当前时间该通行方式过于紧张,请及时处理。
通过上述步骤,便于计算节省时间的通行方式,并作出相应的处理方案。具体流程如图1所示。
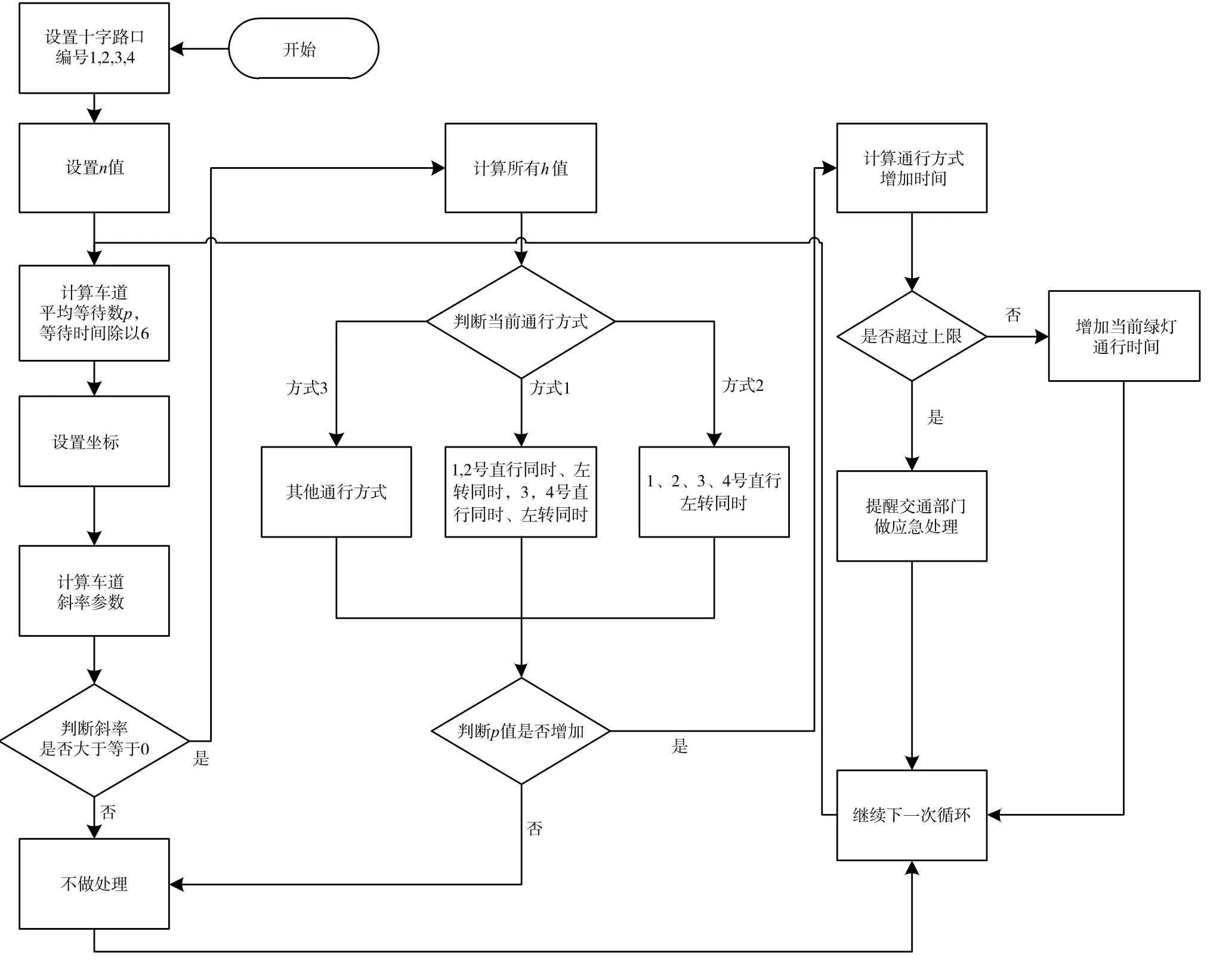
图1 数据处理流程图
3 算法结果
以某十字路口上午八点的数据为例,设置次数n=2,单个行驶方向绿灯上限为60 s,1号路口第1次直行车道坐标为(1,2),(2,3),(3,5),(4,7),(5,8),(6,9),1号路口第 1次左转车道坐标为(1,1),(2,2),(3,3),(4,4),(5,5),(6,7),2号口第1次直行车道坐标为(1,2),(2,4),(3,5),(4,7),(5,9),(6,10),2 号路口第 1次左转车道坐标为(1,1),(2,2),(3,4),(4,4),(5,5),(6,7),3号口第 1次直行车道坐标为(1,2),(2,4),(3,5),(4,8),(5,8),(6,10),3号口第1次左转车道坐标为(1,0),(2,1),(3,3),(4,4),(5,5),(6,6),4号口第 1次直行车道坐标为(1,0),(2,3),(3,5),(4,6),(5,8),(6,11),4号路口第1次左转车道坐标为(1,0),(2,1),(3,3),(4,4),(5,5),(6,5);1号口第2次直行车道坐标为(1,3),(2,5),(3,7),(4,8),(5,10),(6,12),1 号路口第 2 次左转车道坐标为(1,2),(2,4),(3,6),(4,7),(5,9),(6,10),2号口第2次直行车道坐标为(1,1),(2,4),(3,7),(4,9),(5,12),(6,14),2号路口第2次左转车道坐标为(1,1),(2,2),(3,4),(4,7),(5,8),(6,9),3 号口第2 次直行坐标为(1,2),(2,4),(3,6),(4,8),(5,10),(6,12),3号路口第2次左转车道坐标为(1,2),(2,3),(3,5),(4,7),(5,9),(6,10),4号口第2次直行车道坐标为(1,3),(2,4),(3,6),(4,8),(5,10),(6,13),4 号路口第 2 次左转车道坐标为(1,1),(2,2),(3,3),(4,5),(5,7),(6,8)。对应数值的斜率参数如表1和表2所示。
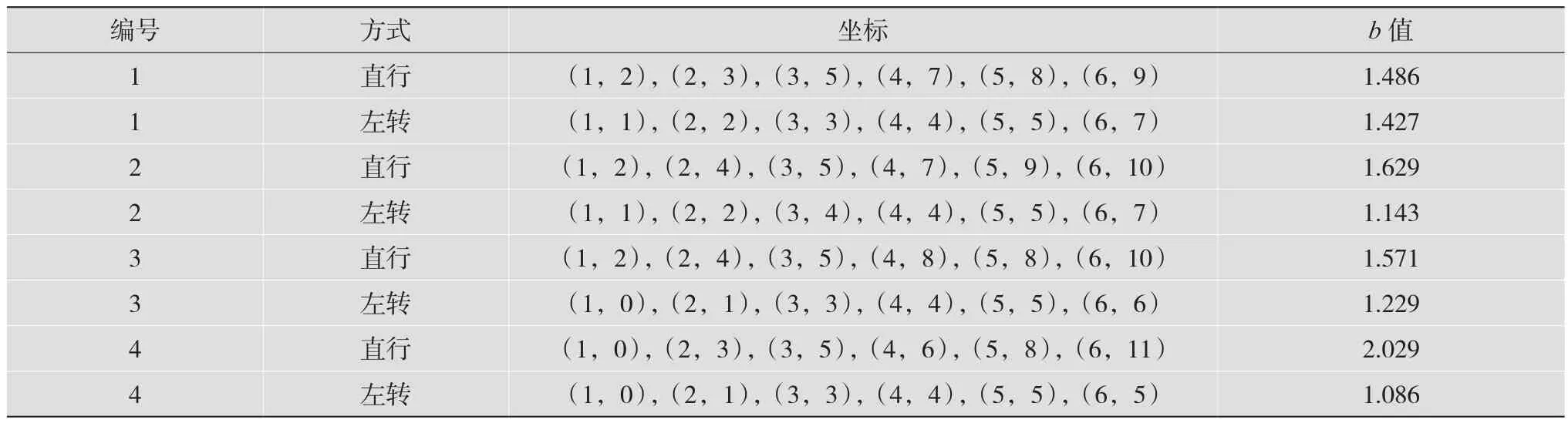
表1 第1次数据坐标、斜率参数
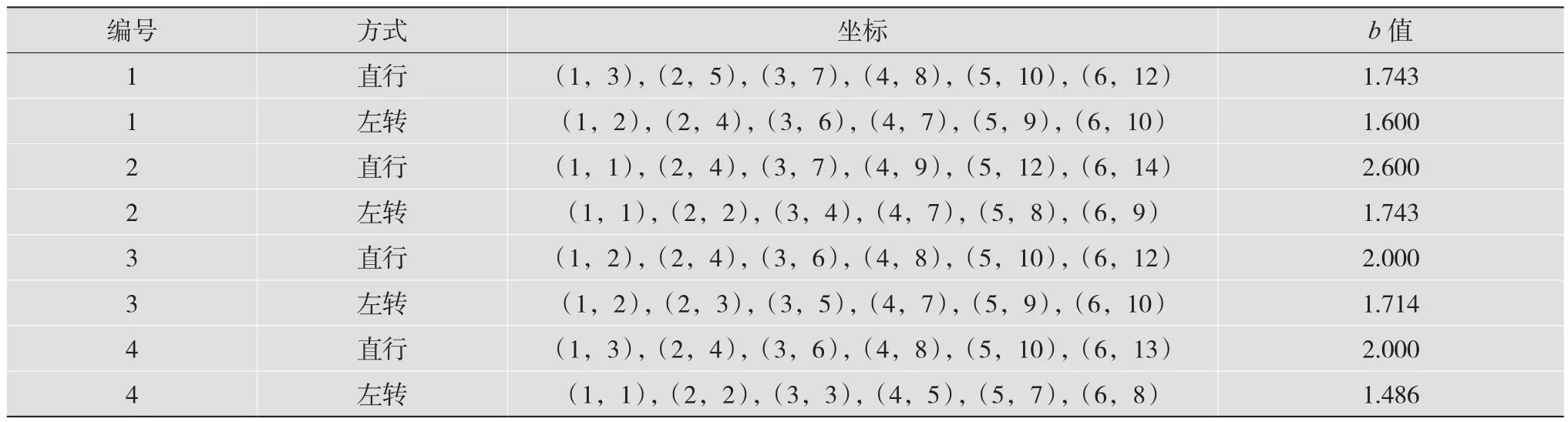
表2 第2次数据坐标、斜率参数
形成的buvn,hj及hj值比较如表3所示。

表3 buvn,hj及hj值的比较
根据表3,若h2+h4<h1+h3,则 以 1,2号 车道直行同时开通,1,2号左转同时开通;若h6+h8<h5+h6,则以3,4号车道直行同时开通,3,4号车道左转同时开通。每个车道增加的绿灯时间如表4所示。
根据表4,当车辆增多时,绿灯时间随之增加,但不能超过限定值。
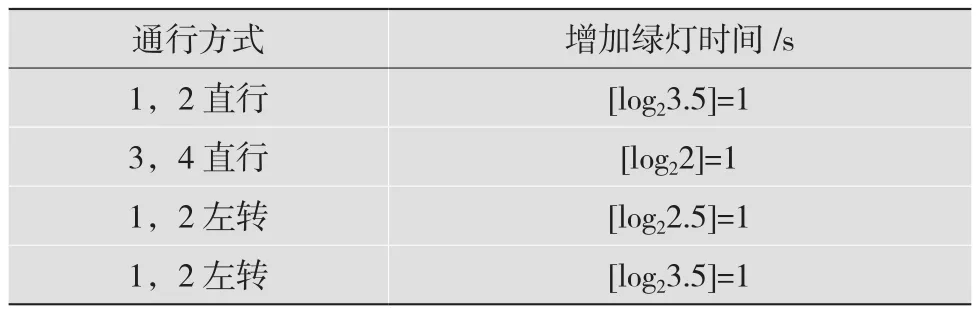
表4 每个车道绿灯增加时间
4 结 语
本文基于线性回归理论,计算各个值的斜率参数,进而求得hj(j=1,2,3,…,8),最后通过比较hj的大小,判定合适的通行方式。用此方法可有效地动态调节绿灯时间,有效防止因车辆过多且通行时间太短而导致车辆拥堵情况。当然,此方法也有不足之处,对于5个以上的路口,需要调整算法。