煤矿井下UWB 读卡器天线标定方法研究
2022-02-10温贤培
温贤培
(中煤科工集团重庆研究院有限公司,重庆 400039)
煤矿安全“六大系统”中高精度的人员定位系统是工作人员安全生产的有力保障[1-3]。相对于地面普遍采用的GPS 定位技术,煤矿井下采用蓝牙、Zigbee、RFID、UWB 等室内定位技术实现人员定位,传统2.4 GHz 定位技术几乎都采用RSSI 判断距离的方法实现定位,煤矿井下空间狭小、路况复杂、粉尘量大,导致RSSI 信号极不稳定,定位精度通常只能达到米级,已不适应定位精度需求越来越高的煤矿井下人员定位系统[4-6]。
UWB 技术相对于传统无线通信技术,它采用超宽带方式进行信息传输,单通道带宽可达500 MHz,频谱覆盖3.5 GHz 到6 GHz 范围,由于采用瞬时尖峰脉冲发射数据,不需要使用像传统无线通信体制中的载波,其具有系统设计复杂度低,发射信号穿透力强,信息安全性高,定位精度高等优点,尤其适用于室内等密集多径场所的高速无线接入,且可采用类GPS 定位方式实现高并发量需求,现已成为室内定位首选定位技术[7-8]。煤矿井下采用UWB 读卡器实现井下人员精度定位,UWB 读卡器根据安装环境选用不同长度的馈线和不同型号的天线,为确保定位精度满足标准需求,现场安装完毕后需进行天线延时参数标定,传统标定方法采用全站仪进行标定距离测量,并手动迭代校准天线延时参数以满足现场需求,在煤矿井下操作难度较大且极其不方便,需要一种方便快捷的标定方法满足现场需求。
1 UWB 测距原理
UWB 信号在本质上是占空比很短的射频脉冲信号,并在脉冲信号上进行无载波扩谱,用户要传输的信息进行一定方式调制后放大到所需功率,再通过变压器和电容耦合到天线发射出去,信号发射瞬间功率较大但功率谱密度却很小。当天线接收到UWB 信号时同样经过变压器和电容耦合到信息接收端,对接收信息进行滤波放大再经过一系列复杂算法进行信息分离,分离出前导码、序列号、数据、校验码以及干扰等信息,并对信息进行错误校验,最后输出数据和数据报告。
UWB 实现精确定位可以采用时间差定位法(TDOA)、到达时间定位法(TOA)、相位差定位法(PDOA)以及飞行时间定位法(TOF),但不管采用哪种定位法都会受到天线延时参数的影响。UWB 测距流程如图1。
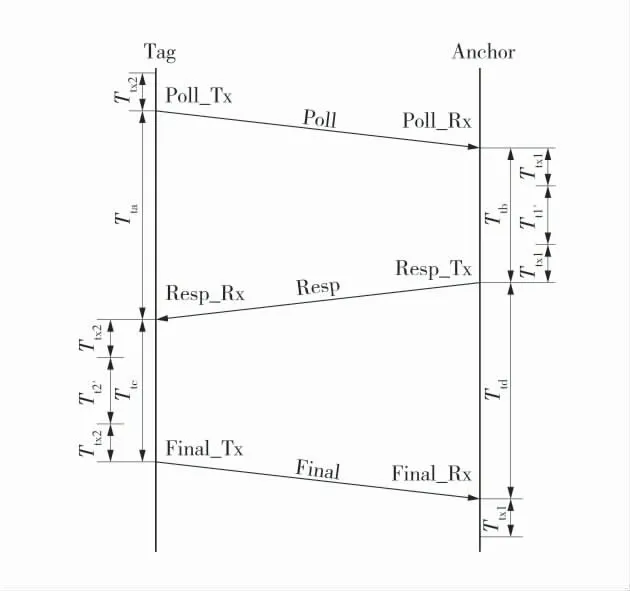
图1 UWB 测距流程Fig.1 UWB Ranging process
Tag 发出Poll 帧经过天线发送延时Ttx2时间段后发射到空气中,Poll 帧发送时间戳计为Poll_Tx,Anchor 接收到Poll 帧时间戳计为Poll_Rx,经过天线接收延时Trx1时间段后接收数据,Anchor 处理数据所需时间为Tt1’,然后发出Resp 帧数据,经过天线发送延时Ttx1时间段后发送到空气中,Resp 数据发送时间戳为Resp_Tx,Tag 采用同样的方式处理,根据式(1)可求出测距距离d:

式中:d 为测距距离;Tta为Poll_Tx 和Resp_Rx时间差;Ttb为Poll_Rx 和Resp_Tx 时间差;Ttc为Resp_Rx和Final_Tx 时间差;Ttd为Resp_Tx 和Final_Rx 时间差;c 为光速。
为了确保测距精度满足使用需求,公式中的变量都必须精准可靠,以Ttb时间测量为例,UWB 芯片只能够直接测量出Tt1’的值,然后加上Trx1和Ttx1的值得出Ttb的值,Trx1、Ttx1分别为Anchor 天线的接收、发送延时,接收、发送延时参数偏差都会影响测距精度,因此UWB 读卡器天线延时参数标定准确与否将直接影响距离测量精度。
2 系统设计
2.1 方案设计
UWB 读卡器天线延时参数标定前必须准确测量出待标定的距离值,通常可采用激光测距仪或全站仪进行精确测量,但普通的激光测距仪量程较短不能满足现场使用需求,全站仪测距精度高达毫米级,测量范围也可上千米,但是全站仪标定流程太复杂也太费时,不能满足复杂环境下快速自动标定UWB 天线的需求。UWB 测距技术本身就满足厘米级的距离测量,采用特殊匹配的UWB 设备进行标定距离测量,并通过滤波处理作为标定距离供UWB读卡器自动标定使用,UWB 读卡器根据标定距离自动修改UWB 天线延时参数,直到UWB 读卡器测距值与标定值偏差在规定范围内则认为标定完成。
将UWB 标识卡放置于UWB 读卡器前一段距离并固定不动,放置距离最好大于100 m 以上,减少其它因数造成的测距偏差。UWB 测距通常会有10 cm 左右的波动偏差,系统将100 次测距数据进行顺序排序,取中间40 个数据进行均值滤波算出标定值Dt,UWB 手持读卡器将标定距离Dt通过UWB 网络传输给UWB 读卡器并启动自动标定流程。
UWB 读卡器接收到标定距离Dt后启动自动标定程序,自动标定程序超时时间为8 s,UWB 读卡器测距值与Dt相差10 cm 以内且则认为标定成功,否则标定失败。标定流程图如图2。
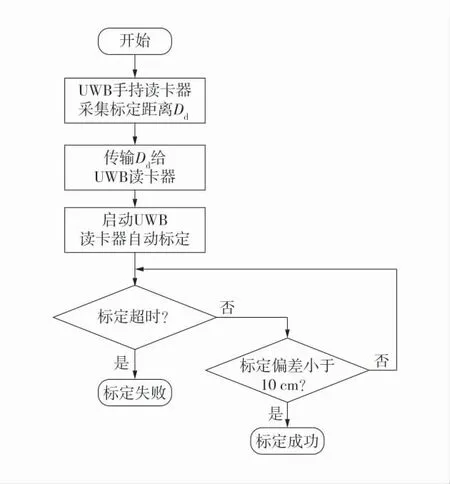
图2 标定流程图Fig.2 Calibration flow chart
2.2 通信协议
UWB 手持读卡器入网到UWB 读卡器网络,UWB 读卡器分配时序以供与UWB 手持读卡器通讯。通信协议由UWB 手持读卡器发起,UWB 读卡器接收信息后回传信息完成数据交互。
1)UWB 手持读卡器协议。请求协议附带工作模式控制字,通知UWB 读卡器切换为何种工作模式,模式分为测距模式和标定模式,同时传输供UWB天线标定所使用的距离标定值。UWB 手持读卡器通信协议见表1。
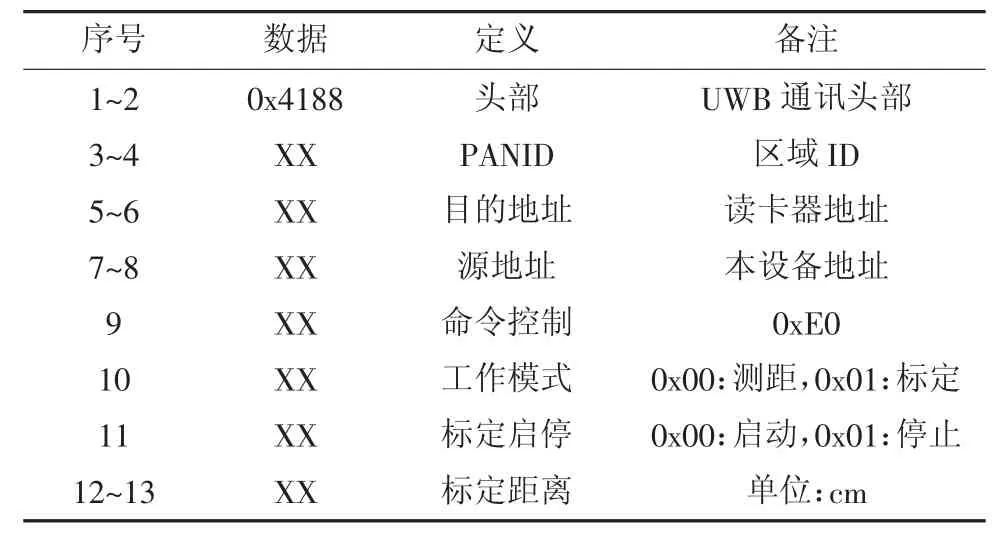
表1 UWB 手持读卡器通信协议Table 1 Communication protocol of UWB hand-held card reader
2)UWB 读卡器协议。读卡器接收标定命令后进入标定状态,并停止与标识卡进行正常测距,接收标定启动命令后进行自动标定,并实时传回标定状态。UWB 读卡器通信协议见表2。
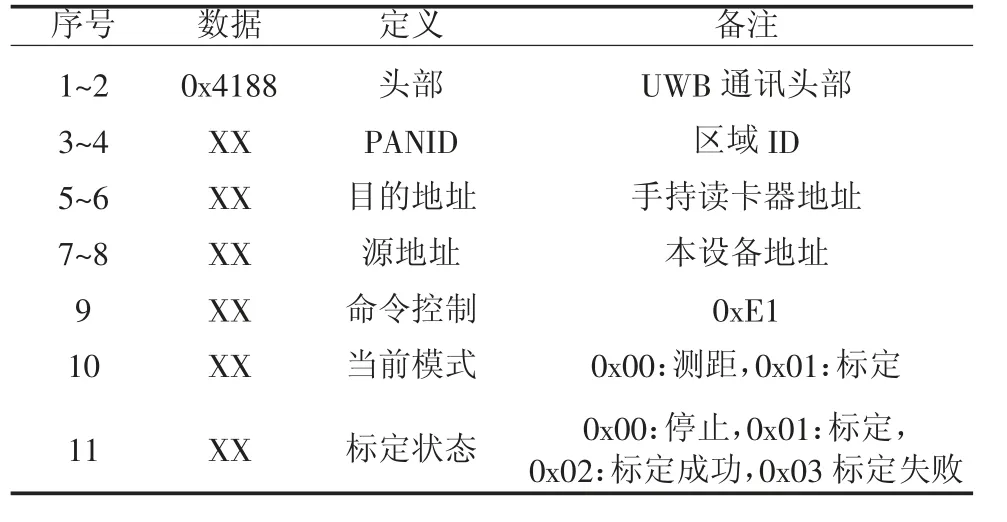
表2 UWB 读卡器通讯协议Table 2 Communication protocol of UWB card reader
3 自动标定
PID 控制算法具有历史悠久,性能稳定,反应迅速,适应性强,控制参数相互独立,良好的闭环控制性能等优点,也是应用最广的控制算法之一[9-10]。系统中采用了增量式PID 控制算法进行控制,增量式PID 控制算法相对于位置式PID 控制算法不需要做累加,而是在当前控制量的基础上增加控制量达到调节参数的目的。计算出现故障时可丢掉本次增量,减小故障影响,由于执行器本身具有记忆功能,可保持上次操作。UWB 天线标定系统延时小、惯性小,能迅速反馈天线参数变化改变的测距变化,可取消增量式PID 算法里面的微分项,采用PI 控制已完全能适应需求。计算公式如式(2):
u(k)=u(k-1)+KP[e(k)-e(k-1)]+KIe(k)(2)
式中:u(k)为天线标定值;u(k-1)为上次天线标定值;KP为比例参数;KI为积分参数;e(k)为标定值与测量值偏差;e(k-1)为上次标定值与测量值之间的偏差。
采用PID 控制后UWB 读卡器将会自动判断标定距离与测量距离的偏差值进行实时参数修正,以达到快速自动标定的需求,自动标定成功除了判断标定值与测量值偏差在10 cm 以内,还需对测量值进行均方差处理引入测距数据波动判断,只有同时满足测距值波动小的情况下才能标定成功。
4 测试验证
山西鑫岩煤矿搭建环境测试,针对多台UWB读卡器在100 m 处进行标定并检测不同距离测距精度,根据数据分析测试效果,测试数据见表3。
由表3 可得,UWB 读卡器采用自动标定方法标定后的测距值总体偏差在20 cm 左右,满足标准规定30 cm 以内的精度需求;现场环境较为恶劣,未能测试在200、300、400 m 处标定后进行测距的偏差值,后续测试中将验证不同环境不同距离自动标定天线延时参数对测距精度的影响。
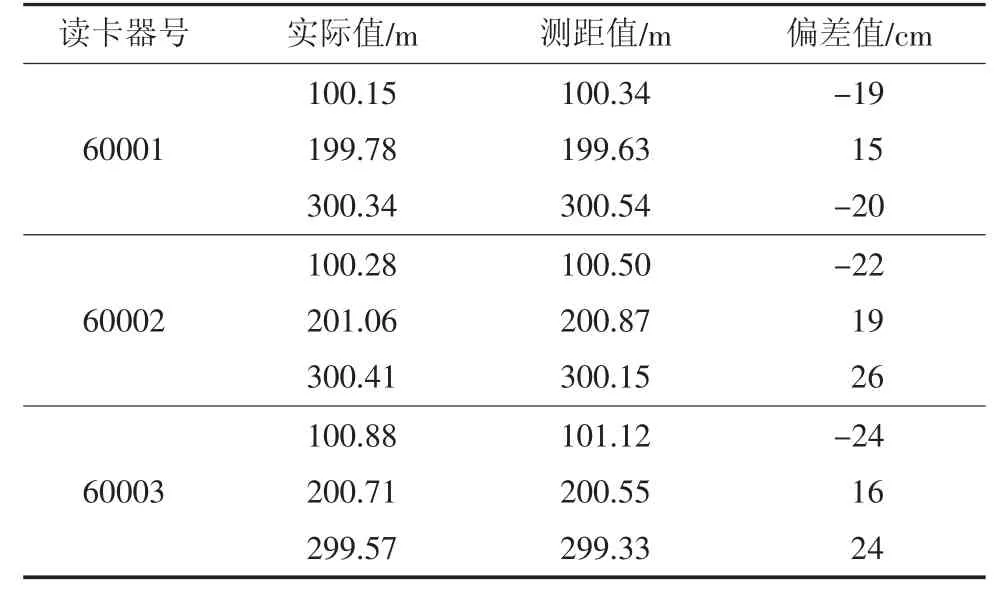
表3 现场测试数据Table 3 Field test data
5 结 语
从UWB 测距原理分析出发,研究UWB 读卡器现场快速标定方法,采用手持UWB 读卡器协助UWB 读卡器快速自动标定,标定后测距精度满足标准需求。但标定时标识卡与读卡器必须处于可视范围内,否则可能会出现标定失败或标定后测距精度不满足标准规定30 cm 以内的精度需求,后续可针对标定数据研究更合适的滤波算法,为UWB 读卡器提供更准确的标定数据提高标定精度。
