基于物联网的泵站供水系统研究
2022-02-10段兴涛姜维军
段兴涛,姜维军
(宁夏希望信息产业股份有限公司,宁夏水利信息中心,宁夏 银川 750001)
1 引言
目前中国是水资源最贫乏的国家之一,如宁夏部分地区还存在取用水困难、供水保证率低、水资源管理水平不高等问题[1,2]。水利是国民经济命脉,是现代农业建设的首要条件,因此政府加大水利工程的建设。为合理开发利用水资源和提高水资源管理水平,本供水系统通过调节水泵控制管网中的流量和压力,应用无线传感器网络和地图应用程序的集成实时控制和监控供水系统。实施分布式控制系统,可根据用户的需求在配水系统中精确分配流量,然后将其输送至目的地,这将大大减少水资源的浪费。利用新技术实时监控测量参数和控制致动器系统,可有效地提高灌区供水保证率,提升水资源管理效率和效益,支撑现代化生态灌区建设,助力区域高质量发展[3-5]。
2 试验方案
设计方案提出一种测试配水系统控制算法的水网络,在实验模型上对控制算法进行验证,找到测量传感器网络泄漏灵敏度的方法。应用物联网监控控制供水系统,该方法具有客户端-服务器架构,其中传感器和执行器节点用无线技术连接,用户界面(UI)通过网络服务访问。通过实验观察该方案的性能,并对该体系结构作为实时控制系统的可行性进行分析。
2.1 实验模型
实验模型示意图如图1所示,图中标明了传感器和阀门的编号位置。对应的物理水网实验模型如图2所示,主要由聚氯乙烯管组成,带有可拆卸的连接件,如联轴器、三通、弯头。实验中水流用手动阀控制,通过调节阀门来模拟用户需求和泄漏情况。水流传感器安装在每个节点的需求或泄漏处,需求节点和泄漏节点的水通过三通接头被引导回供水箱,然后通过DC电泵将其引入水网络。
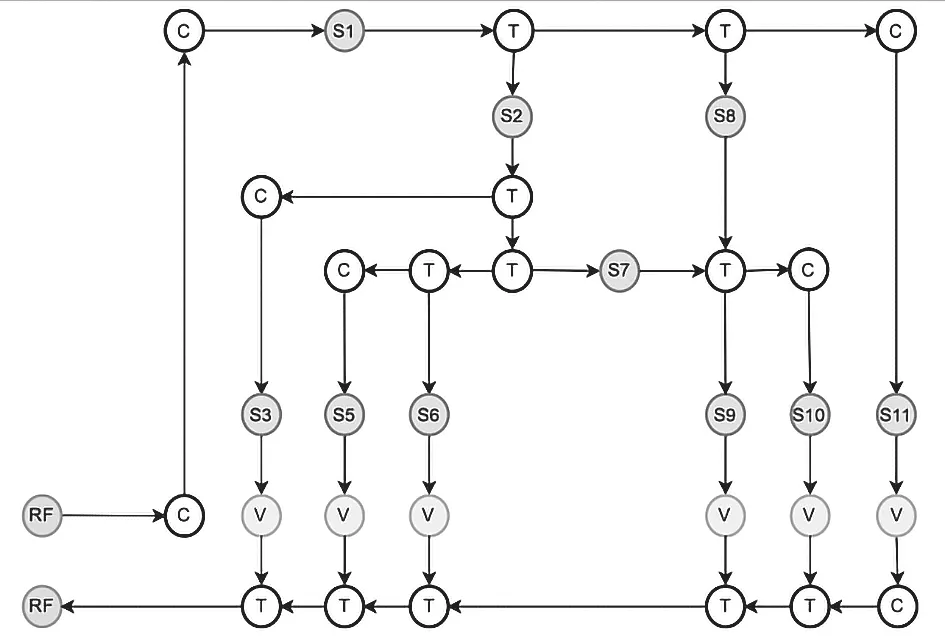
图1 实验模型示意图
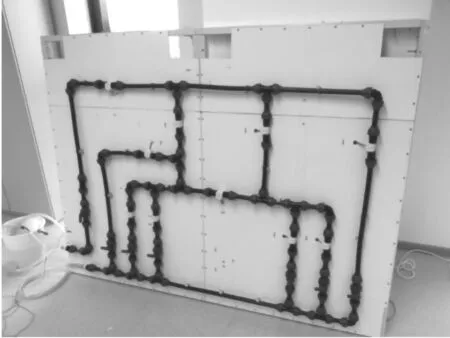
图2 实验模型
2.2 从传感器读取数据
流量传感器包含一个转子和一个霍尔传感器,霍尔传感器将水流转换成电脉冲,通过精确计时读取脉冲,可计算出流量。将Atmega 328p作为应用MCU(微控制器单元)的单元,改变引脚状态来读取传感器信号。在网络较大情况下,解决方案可扩展,每个传感器都有一个微控制器,使用ESP8266 Wi-Fi适配器与中央服务器或网关通信。在这个实验性解决方案中,出于成本原因,在使用MCU的情况下,配置多个Atmega 328p,可完成该实验。
如图3所示,流量传感器(YF-S201)的输出特性范围为1 L/min~30 L/min。应用Q=7.77f-14.860 5的线性近似值,其中f是传感器产生的方波频率,Q是以L/h为单位的计算流量。
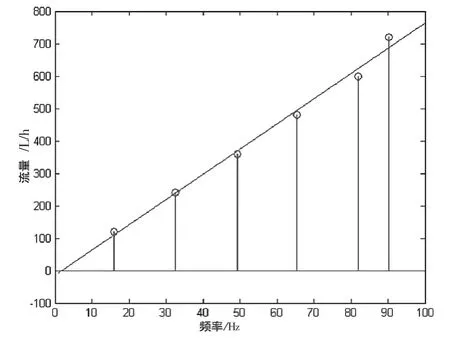
图3 流量传感器特性
使用单个MCU定时器测量连续脉冲之间的时间。定时器1配置64的预分频器,分辨率为4 μs,脉冲频率可通过下式计算:

式中:fosc是16 MHz的时钟频率;N是定时器返回的节拍数。
文中为所有传感器设置一硬件定时器,通过一个变量为每个软件定时,并在定时器溢出时递增。
通过数字低通滤波器降低测量噪声,采样时间Ts=0.1 s,截止频率fc=10 Hz,对应平滑系数如下所示:通过整数算法实现滤波器,可以使计算时间更快、采样速率更高。在这种情况下,平滑系数为0.875,比较接近计算值。
2.3 监控网络
为了测量水网络中的参数,应用一个网络绘图应用程序,它可以处理来自传感器的实时数据,并在地图上显示出相应数据。传感器连接到无线网关时,使用原始套接字实现与应用服务器的连接。传感器将数据连同标识符和传感器的类型一起传输到服务器。用于传感器的无线网络适配器被编程为连接到网关,并具有串口桥的功能,缺点是在传感器范围内需要一个网关。该解决方案采用模块化设计,通过远程无线技术,可用于地理位置较偏的远程传感器。
水网络使用地理信息系统应用程序进行数字化,该应用程序符合INSPIRE指令规范。
文中应用ArcGIS来定义地图的图层:节点、管道和传感器。
图4为网络应用前端,应用AngularJS编写,实现导航、视图和前端逻辑,并将地图应用编程接口集成到应用程序中。与其他方法相比,在功能方面提供了更大的灵活性。


图4 Web应用前端
这些函数库将按以下顺序加载:ArcGIS API、应用程序生成的JavaScript文件和ESRI地图的角度指令,ESRI主题样式表在应用程序样式表之前加载。在应用程序模块中,加载esri.map。然后,在地图视图的控制器中,使用esriLoader加载ESRI模块:地图视图、要素图层、小部件。根据生成的地图定义要素图层,在此应用程序中,包括具有ArcGIS服务器URL的节点、管道和流量传感器图层。通过应用编程接口来检测用户对地图元素的选择,并请求所选传感器的实时数据和历史。其中导航、图表和表格视图等其他功能都是通过使用JavaScript和AngularJS实现的。实时值通过网络套接字从服务器检索,时间序列数据通过超文本传输协议请求检索,选择地图上的元素,就可以显示实时传感器的数据和历史。
后端用Python编写,实现了无线传感器网络、数据库连接、超文本传输协议和网络套接字服务器。该应用程序与ArcGIS和SQL一起运行在服务器上。Pyhton后端实现超文本传输协议和网络套接字服务器的路由。该应用程序用线程来完成主要任务,如从传感器收集数据和控制算法,还使用pyodbc API实现数据库的连接。
传感器通过传输控制协议消息系统连接到服务器。传感器id、类型和数据以CSV格式传输,并由应用程序解析显示在GUI中,然后存储到数据库中。
2.4 流量和压力控制
供水系统中的主要问题是控制特定管道或多个管道的输出流量,首先用测量的流量作为输入值,然后通过泵的控制算法控制输出流量达到设计值。控制器用无线传感器测量数据,在应用服务器上实时控制,将输出值发送到无线致动器,就可控制泵速达到调节流量的目的。
首要目标是找到从泵输入到传感器输出的传递函数,以及满足每个控制目标的算法。文中考虑导致多模型方法的多个场景,控制流量需求节点(传感器10)的阀在整个实验中打开,其它节点(传感器3、5、6、9、11)的阀在每种情况下依次打开和关闭。
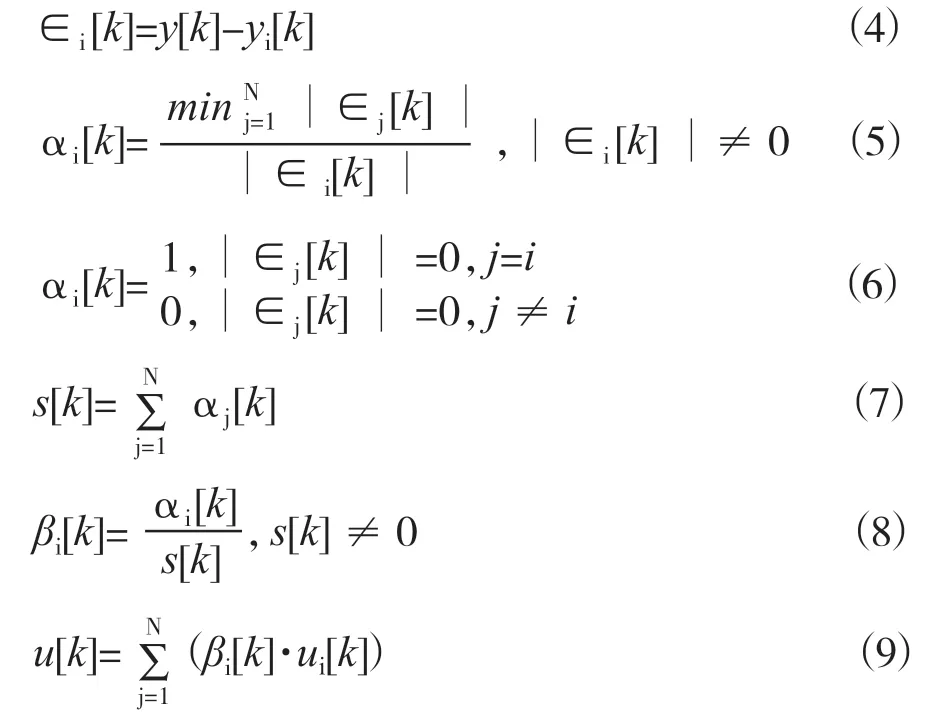
监测人员可根据测量参数选择最佳控制器。通常选择对输出过程估计较精确的模型,或者对模型输出进行加权平均。在水网络较复杂的情况下,模型不相互排斥,多个模型在不同场景下输出相同时,可通过使用控制器输出的加权平均值来解决。应用式(4)为每个模型计算预测输出误差,在式(5)中使用最小绝对值对误差进行归一化,在式(6)中处理误差为零的特殊情况,式(9)中多模型控制器的输出是式(8)计算控制器的输出总和。如果s[k]=0,则选择随机控制器。
当网络状态可以精确测量或估计时,建议通过监控网络中的流量传感器来选择最佳模型。在这种情况下,监控程序块中以测量的流量为使用标准。
2.5 泄漏敏感度
用流量差异的灵敏度矩阵来定义泄漏灵敏度,矩阵如(10)式所示,该测量用于可视化泄漏对网络流量的影响。
偏导数代表标称条件和泄漏情况之间的差异。使用式(11)模拟每个泄漏情况下可获得的最大值,再通过式(12)对每行的灵敏度矩阵进行归一化。
考虑2个需求节点的所有情况,其中1个节点的阀门保持开启状态,另1个节点的阀门按顺序打开,将测量的数据与其他情况下获得的数据进行比较。实验显示每种情况下最敏感的传感器,均以较高精度估计了当前的测试场景。该方法也可用于优化传感器的位置,检测最大泄漏情况。
3 实验结果
本文通过实验模型实时监控泄漏对水网络中流量的影响。为获得流量差异,打开泄漏节点(节点3、6、9、11),关闭每个阀门,将需求节点(节点5、10)的阀门保持在固定位置。记录每种情况下的测量值,灵敏度矩阵用于显示网络中每个泄漏对测量流量的影响。如图5所示,归一化矩阵用红色表示最高灵敏度,蓝色表示最低灵敏度。为生成矩阵,位置(i,j)处的元素表示在节点j发生泄漏的情况下,在节点i中测量的流量差异。对每行进行标准化,即用该行的最大值除以每个元素。使用Matlab函数stem3绘制图表。
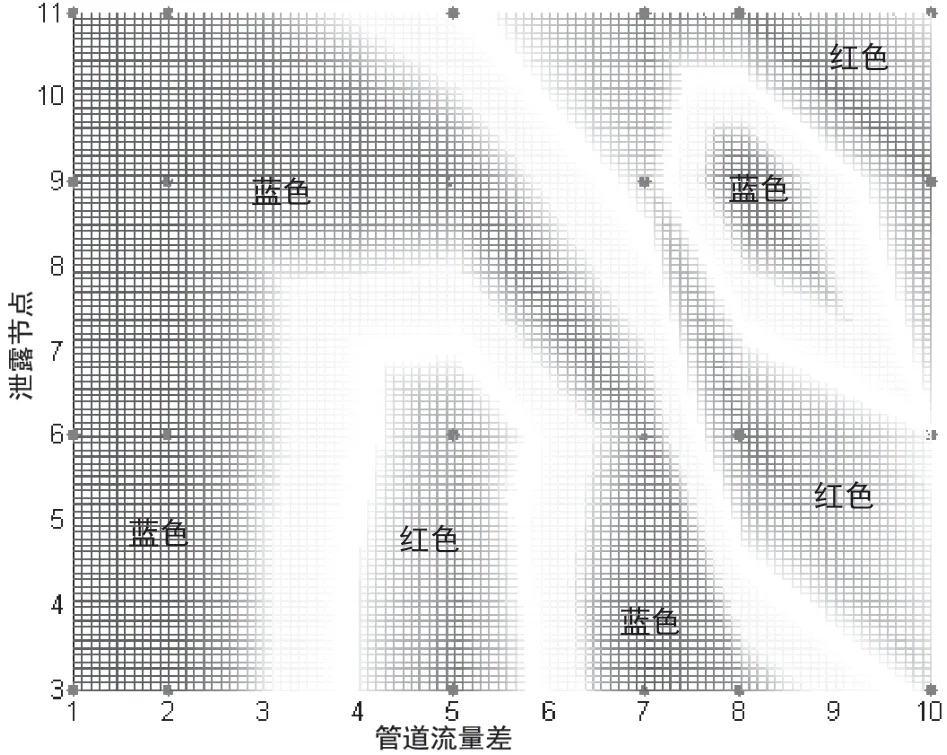
图5 泄漏敏感度
识别过程时,考虑多个场景和多模型控制算法。对于每个主动需求节点,使用实验方法计算一阶模型,在节点10有单个需求场景,在节点5、11有额外需求场景。
根据表1识别的模型调节、设计穿过水网络管道流量的控制算法。每个控制器使用闭环传递函数计算,定义闭环传递函数时需考虑系统的期望性能。选择一阶传递函数时,将产生一个比例积分控制器。

表1 识别的模型
使用多模型控制器来抑制扰动的实验结果如图6所示,在这种情况下,干扰是由于传感器5和传感器11的阀门起闭状态变化而产生的。在这种情况下,虽然系统控制器正确识别了模型,但是在更复杂的场景中,建议使用系统测量状态。图6的上面图中,显示参考值和输出过程;下面图中,显示泵命令,且输入过程是由控制算法生成的。

图6 抑制干扰
实验模型的结构和垂直布局的不确定性使结果不如预期准确,但可通过增加水压来改善结果,这将减少整个输入系统的不确定性,产生更精确的模型。
4 结论
本文通过集成网络框架、开源硬件和ArcGIS的灵活性,建立泵站供水系统的实验模型,在每个管道上安装流量传感器,直接测量系统状态,精确估计控制算法中的模型。水网中压力和流量的精确控制可以延长管道系统的寿命,有助于节能。使用控制器输出的加权平均值时,可满足控制系统中多个模型之间平滑过渡的要求。多模型方法可优化控制泵信号的控制策略,提高设备的能量效率和寿命。
