自动循环式挖穴栽植一体机的设计*
2022-02-10李伊凡康之讷谢新杰徐陶祎
李伊凡 , 康之讷 , 秦 堃 , 谢新杰 , 徐陶祎
(武汉城市学院,湖北 武汉 430083)
1 概述
植树造林是我国绿色发展工作重点之一。在推进“一带一路”建设的过程中,帮助沿线地区解决土地荒漠化的问题,具有积极的意义。据2020年发布的第九次全国森林资源调查结果,全国森林覆盖面积为2.21亿公顷,森林覆盖率为22.96%,远低于世界31%的平均水平,尤其是甘肃、新疆等地区,由于人力资源匮乏加之土质原因,森林覆盖率仅为10%左右[1]。因此,要想实现我国森林资源建设的总体目标,机械化植树造林是必由之路。
2 自动循环式挖穴栽植一体机机械结构设计
2.1 整体架构
自动循环式挖穴栽植一体机的机械结构包括:履带式驱动行走机构、三叶爪升降式挖坑机构、旋转轮盘送苗机构、培土机构和浇水机构。将行驶、挖坑、栽植、培土和浇水等多种功能合而为一,机械整体结构如图1所示。

图1 自动循环式挖穴栽植一体机整体结构图
2.2 履带式驱动行走机构
全自动栽植一体机的行走机构由履带底盘、控制电机、齿轮、传动杆等组成,如图2所示。
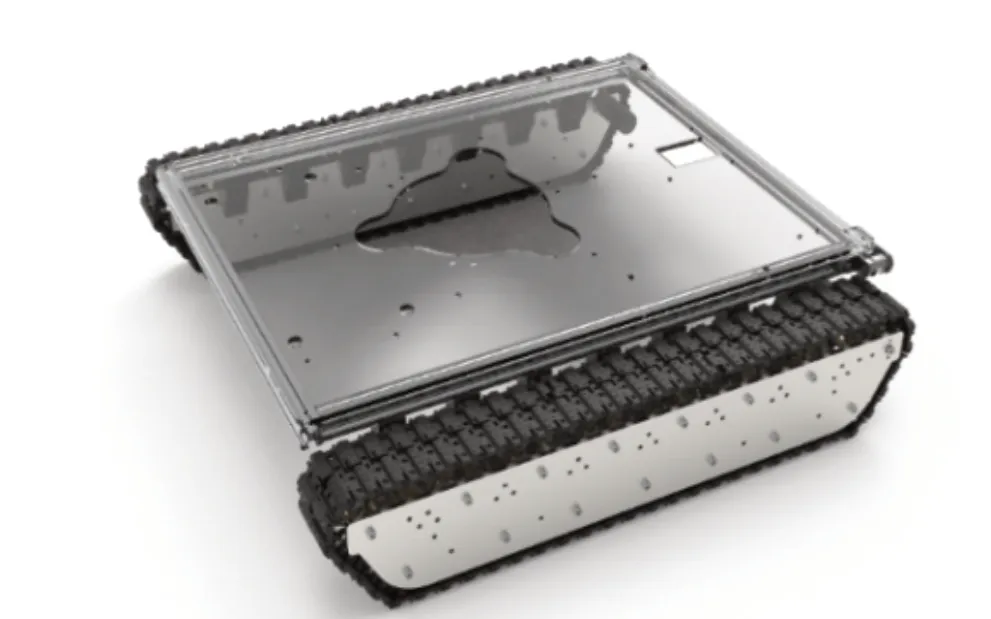
图2 履带式驱动行走机构结构图
考虑到产品主要的工作环境为荒漠区沙地或地形崎岖的林地,因此,选择了固定式履带行走机构。该机构由全数字控制的四轮直流伺服电机组成,负责机器人在作业过程中的行走驱动。其特点是导向轮不作支撑,驱动能力、承载能力和稳定性表现更佳,能避免在复杂地貌中行走时因卷入泥土而造成的磨损和失效,从而延长驱动轮和导向轮的使用寿命。并且在雨雪地、泥地、沙地等坡度路面提高地面摩擦力,避免出现车轮空转现象。
2.3 三叶爪升降式挖坑机构
挖坑机构位于履带底盘中间,采用三叶爪式升降挖头,便于挖穴成型和向周围堆放。三叶爪升降式挖坑机构主要由三叶爪式取土挖穴器、导轨、滑块、动力输入轴、伸缩电机、机架连接销等组成,如图3所示。
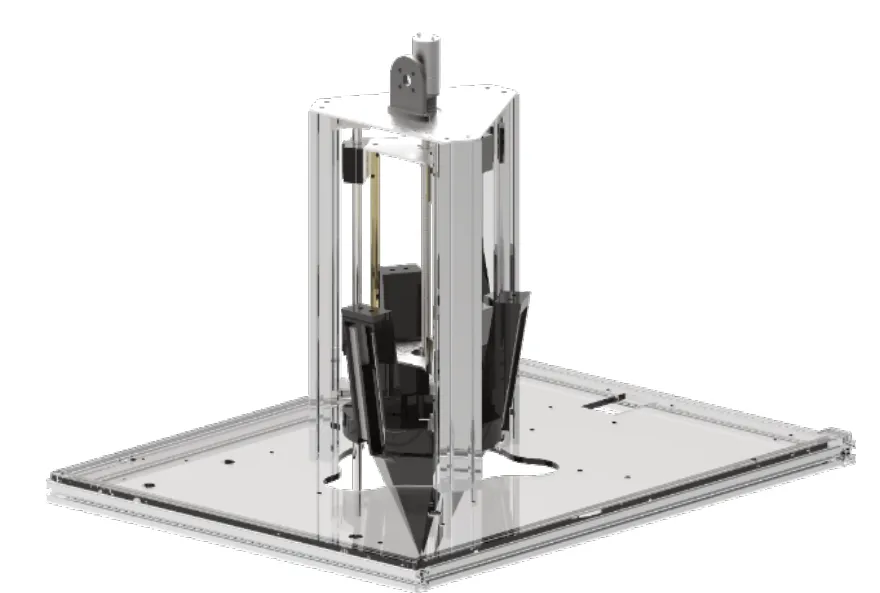
图3 三叶爪升降式挖坑机构结构图
三叶爪式取土挖穴器设计为三块上端大、下端小的三角形状叶片,有利于挖坑时挖头顺利地刺入土壤。工作时挖头沿导轨向下滑动以张开的姿态竖直向下入土,同时对土壤产生剪切作用,在达到一定入土深度后,在伸缩电机作用下各叶片沿滑槽移动,挖头闭合器闭合,使土壤产生形变而汇集在挖头内部,随后沿导轨向上以闭合姿态竖直出土,完成取土的同时形成孔穴,挖头随整机运行移动至成型孔穴前方,再在伸缩电机的作用下向外打开完成排土,随后复位完成整个挖坑成穴过程。
2.4 送苗栽植机构
送苗栽植机构主要由蜗轮环、蜗杆、旋转环、苗株卡槽、栽植机械臂、电机等部件组成,如图4所示。
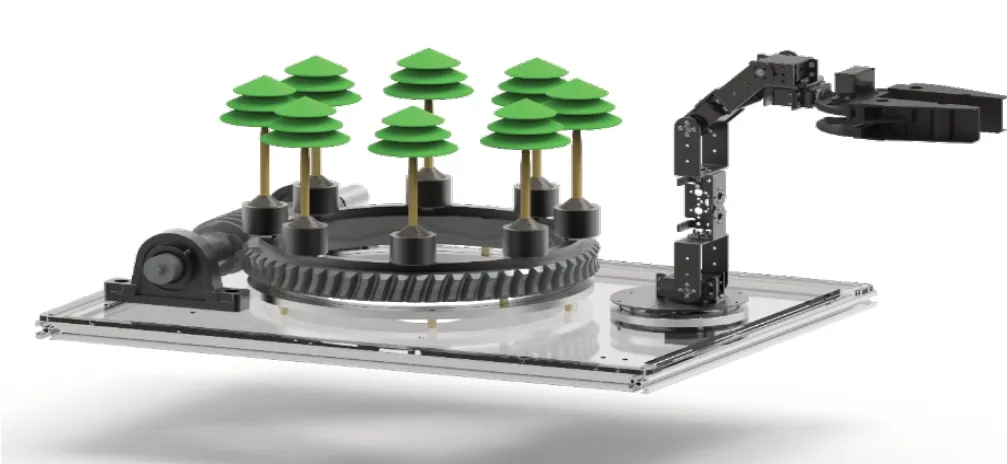
图4 送苗栽植机构结构图
运用蜗轮蜗杆的运动特点,创新式设计蜗轮环结构,底部利用带有滚珠轴承的旋转环与履带底盘相连,蜗轮环上根据栽植需要设置6~8个苗株卡槽。工作时,电机带动蜗杆传动蜗轮环,使得安装在环上的苗株卡槽转动。安装在送苗机构后方的6自由度机械臂每次都夹取正前方卡槽中的树苗,并将其放置到刚刚挖好的坑穴中,完成一次树苗的输送,接着蜗轮环转动一格,机械臂放置下一棵树苗,直至蜗轮环上的苗株放置完毕。
2.5 培土机构与浇水机构
培土机构连接于履带底盘后部下表面处,由导轮、滑轨、皮带、连杆式培土块、培土块固定件、舵机、电机等组成,如图5所示。工作时,皮带带动培土块滑动聚拢,再以舵机控制连杆机构,实现培土块的上下往复踩踏动作,从而完成培土过程中的反复拍土,高效地完成聚拢拍土环节。

图5 培土机构结构图
浇水机构包括水箱、水管、喷头和电动水泵,培土过程结束后,主控单元控制开关阀的关闭进而完成浇水作业。在这个工作过程中,控制系统会根据不同种类树苗所需水量的不同来控制浇水时间,完成差异化作业。
3 系统控制结构
本设计方案基于Torobot蓝牙模块、中央控制器Raspberry Pi Ⅲ和舵机驱动板,其整体的控制系统主要由两部分组成。一部分为运动控制系统,由直流伺服驱动电机和高性能多轴运动控制器组成,主要用来完成植树机器人的行驶、挖坑、栽植、培土和浇水等功能;另一部分为信息传输系统,主要包括人机接口、多传感器信息融合单元,比如数据采集、数据处理和环境监测等[2]。系统总体结构如图6所示。
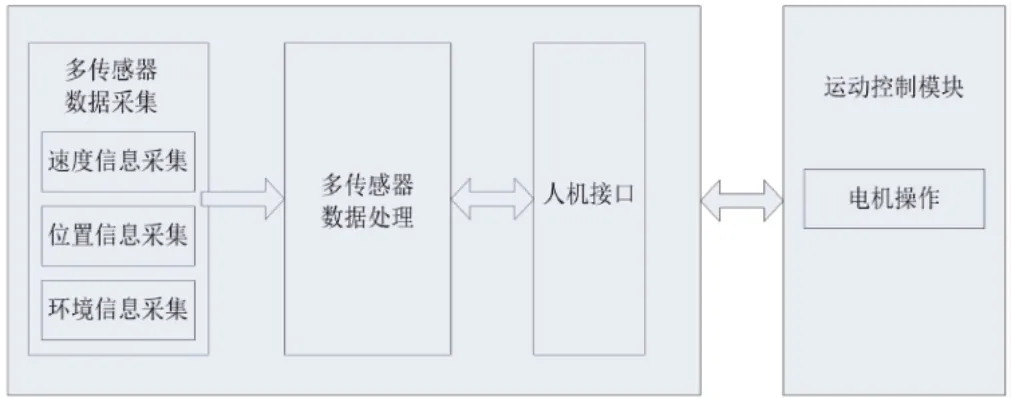
图6 植树机器人控制系统总体框图
为了使植树机器人具备良好的运动性能,采用了专业驱动器来实现直流伺服电机的运转。本设计选用铭朗科技公司的MLD3810电机驱动器[3-4],该驱动器可以很好地控制电机转速,从而改变机器人的移动速度。该驱动器通过RS232串口与运动控制卡进行通信,完成主控芯片控制、参数调整以及在线监测等功能,利用输入模拟信号和PWM信号控制植树机器人运动速率,利用输入脉冲信号和方向信号控制植树机器人步进模式[5-8]。
机器人上安装HOKUYO公司制造的URG-04LX 2D型激光扫描传感器[9],可完成测量工作,测量距离范围为60 mm~4 000 mm,测量角度为0°~360°,扫描间隔时间为100 ms,用于控制植树机避障、识别植树坑穴位置等功能。
本设计选用LP3300型号数字罗盘,罗盘自带倾角传感器和磁场传感器,可以测量植树机器人的航向、俯仰角等参数,主要用于辨别植树机的行进方向[10]。罗盘本身具有俯仰角度和翻转角度的补偿功能,当植树机在斜坡上行驶或遇到障碍时,罗盘的俯仰角和翻转角输出数值变化不大。
4 设计创新点
相较于市面上已有的栽植设备,该自动循环式挖穴栽植一体机有如下创新点:
1)本设计可实现林木栽植过程自动化,且工作过程中可以动态调整工作参数,可用于代替繁重的人工劳动,可在艰苦的环境中作业,具有广阔的应用前景。
2)较之市面上功能较为单一的挖坑机,课题组所设计的全自动栽植一体机将挖坑、送苗、培土和浇水四个步骤集于一体,具有高度的功能集成化,一台机器能够完成全部栽植过程。
3)本设计具备间歇式挖穴栽植机构的控制系统,可实现行进间间歇式挖穴栽植、智能调节栽植深度以及精准株距控制等,自循环完成栽植作业。
