基于无人机可见光影像和面向对象的树种分类研究
2022-02-10温昱婷兰玉彬杨东建潘方江曹佃龙
温昱婷,赵 静*,兰玉彬,杨东建,潘方江,曹佃龙
(1.山东理工大学 农业工程与食品科学学院,山东 淄博 255000;2.山东理工大学 生态无人农场研究院,山东 淄博 255000)
随着光学传感器及计算机图像算法的发展,应用遥感技术进行树种分类成为研究热点[1-5]。树种分类研究不仅是区域内林业部门进行种植结构调整的基础,也是林业资源管理的主要依据[6-8]。近年来,随着国内外卫星技术的发展,利用卫星遥感手段开展树种分类研究成为有效提升调查效率的重要手段。但卫星遥感受传感器及气候影响,时间分辨率和空间分辨率较低,无法满足小区域精准分类的发展需求。无人机技术的快速发展,为小面积树种生境遥感解译的研究提供可能[9-12]。无人机遥感具有分辨率高、机动灵活、操作方便等优点,可与卫星遥感数据互为补充,准确快速提取树种信息则是无人机遥感在林业发挥作用的关键。研究精准的树种分类方法,对于林业种植结构分析、树种调查、病虫害防治等工作具有重要意义。
目前基于无人机进行树种分类研究的方式主要为2种:一是基于像元利用图像光谱、纹理、颜色等特征进行分类,如进行植被指数的构建以实现图像特征信息筛选和优化。李哲等[13]在分层分类的基础上,利用SVM、决策树、FSO特征优选方法实现多类树种的分类,表明基于决策树所选用特征分类精度最高且用时最短,分类精度达86.90%。E.B.Jonasetal[14]利用消费级无人机获取瑞士高原小比例农田影像,对耕作生境进行分类的结果表明,在RGB影像中添加NIR波段可有效增加影像空间分辨率,提升影像分类精度。二是面向对象利用图像光谱、纹理等特征进行分类。戴鹏钦等[15]利用面向对象结合深度学习方法对森林树种进行遥感分类,引入VDVI和ExG-ExR 2个特征图像与RGB图像进行融合,证明引入特征图像可有效提高FCN的分类精度。T.F.Benjaminetal[16]利用无人机获取英国6个林地的遥感图像,以无人机影像与地面抽样调查数据的相似性生成正交图谱,基于像素和面向对象进行树种分类,基于像素分类精度为71.43%,面向对象分类精度为85.71%。目前对非耕作生境的解译研究大多都是基于卫星尺度开展,难以符合林业精准管理的需求。基于无人机遥感的树种分类研究中,将纹理特征、颜色特征作为分类依据的研究较多,引入DSM图像结合面向对象的方法进行树种分类的研究鲜有报道。
本研究利用无人机获取的可见光影像与DSM图像进行特征融合,采用面向对象的方法对获取的林地可见光影像进行分类研究,提高无人机可见光影像的作物分类精度,在林业种植结构分析、林业资源管理、病虫害防治等工作中寻求一种高精度分类方法。
1 材料与方法
1.1 研究区概况
试验区位于山东省淄博市临淄区朱台镇谢家村(118°13′E,36°57′N),面积为1.92 hm2。平均海拔约27 m,土壤类型为沙壤土,试验区主要树种为矮冬青(Ilexlohfauensis)、三球悬铃木(Platanusorientalis)、马尾松(Pinusmassoniana)和紫叶李(Prunuscerasiferaf.atropurpurea)。试验区域属于北温带,半湿润大陆性气候,夏季炎热多雨,冬季干燥寒冷。年平均温度13.2 ℃,年平均降水量650~800 mm,降水主要集中在夏季,全年日照时长2 100 h。
1.2 数据获取及预处理
试验数据获取工作于2020年6月5日11:00-13:00进行,当日风力小于4级,天气晴朗,数据采集设备为大疆精灵4 RTK,搭载可见光相机(DJI FC6310R),航高70 m,飞行速度5 m·s-1,设置航向重叠率为80%,旁向重叠率为70%,曝光方式为自动曝光,获取图像空间分辨率0.02 m,存储格式为JPG。无人机图像数据获取完成后,对试验区域树种信息进行实地调查,记录树木的种类及分布区域。
利用Pix4Dmapper软件对无人机获取图像进行拼接生成数字正射图像(digital orthophoto map,DOM)和数字表面模型(digital surface model,DSM)。Pix4Dmapper拼接流程如下:首先利用每张原始图像的飞行POS数据寻找同名点进行匹配,然后通过空中三角测量计算生成点云模型,对图像进行自动校准并生成可见光影像和DSM图像。由于受成像设备与外部环境噪声影响,在数字化与传输过程中存在图像噪声,因此频率域选用滤波窗口大小为7×7的卷积低通滤波对图像进行处理,消除图像噪声,提高后续图像处理效率。同时由于数据量大,为避免建筑用地等因素对作物分类可能造成影响,试验区分布见图1。
1.3 研究方法
1.3.1 可见光影像色彩空间转换 由于可见光影像只包含红绿蓝3个波段的信息,因此不能计算含有近红外波段的多种植被指数。色彩空间转换可有目的性地丰富图像信息量,提高目视效果,以满足分析应用需要[17]。本研究选用HSV(USGS Munsell)彩色系统[18-20]描述试验区域的颜色特征[21]。在HSV色彩空间中色度变化范围为0~360(0和360代表蓝,120代表绿,240代表红);饱和度变化范围0~208,值越高代表颜色越纯;颜色亮度值的变化范围0~512,较高的值代表较亮的颜色。RGB颜色空间向HSV颜色空间的转换为一种像元级转换[22],其公式如下。
R′=R/255
(1)
G′=G/255
(2)
B′=B/255
(3)
Cmax=max(R′,G′,B′)
(4)
Cmin=min(R′,G′,B′)
(5)
Δ=Cmax-Cmin
(6)
(7)
(8)
V=Cmax
(9)
式中:R为红波段反射率;G为绿波段反射率;B为蓝波段反射率;C表示3个波段的赋值总称。
1.3.2 树种分类提取方法 根据面向对象分类方法设计树种提取研究技术路线见图2。将可见光影像和DSM图像进行特征融合,其中,DSM图像表示的是最真实的地面起伏情况,在农、林业测绘及监测领域应用极为广泛[23-24],特征融合利用ENVI软件中Layer Stacking工具完成。面向对象是一种基于目标的分类方法,分类时将相同属性像元组成的对象进行进一步处理。以图像的颜色特征、纹理特征、形状特征等属性信息为依据,可得到高精度的信息提取结果[25]。此分类方法可以弥补基于像元分类的不足,在很大程度上提高遥感数据的分类效率,有效减少遥感图像分类中“同物异谱”“同谱异物”和基于像素分类时的椒盐现象[26]。
根据试验区域地物种类及图像特征,以每个分割对象为单元对图像进行分类处理,选择用于分类的特征空间分别为:颜色特征、纹理特征及几何特征。颜色特征选择平均值(mean)、标准差(standard deviation)、亮度(brightness);通过灰度共生矩阵提取纹理特征,纹理特征包括平均值(mean)、均方差(variance)、平均熵(entropy)等8个参数;几何特征选择长宽比(length/width)、形状指数(shape index)和紧凑型(compactness)等参数[27-29]。
2 结果与分析
2.1 色彩空间转换结果分析
由图3A-图3F为可见光影像的地物特征,图3a-图3f为色彩空间转换后HSV图像的地物特征。HSV图像中紫叶李呈现饱和度较高的深红色,均质性较高;裸地呈现紫色,覆盖面积大;矮冬青、三球悬铃木、马尾松呈现不同程度的绿色,但冠层纹理特征区别较大,矮冬青亮度值较高,三球悬铃木和马尾松色度单一但不均匀;阴影呈现出与裸地色度相近的紫红色,均匀分布在各类树种间。表1为色彩空间转换前后各树种在蓝、绿、红波段的像元值,可知矮冬青、三球悬铃木、马尾松在3个波段的像元值有交叉现象,通过可见光影像仍难以提取3类树种,考虑将DSM图像与可见光影像进行特征融合。
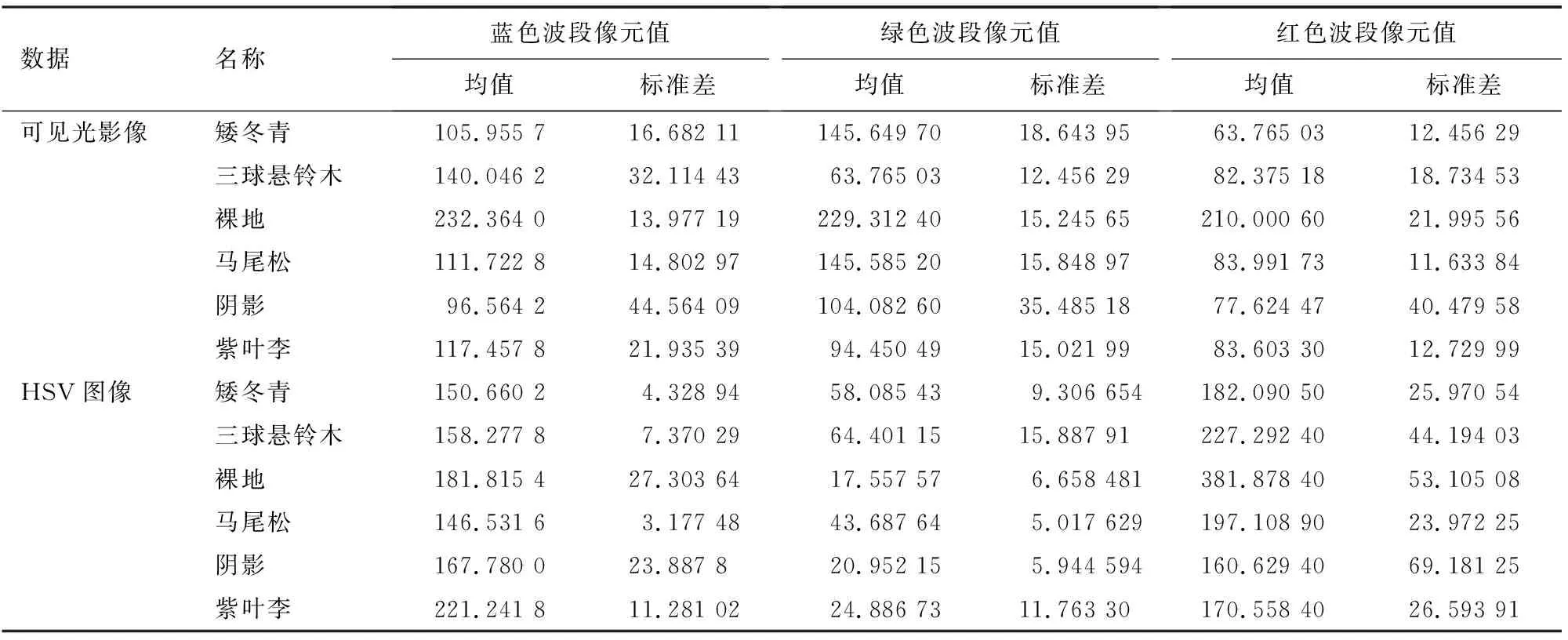
表1 各地物在蓝、绿、红波段像元值差异
2.2 面向对象的树种分割结果
面向对象分类流程分为两步:图像对象构建和图像对象分类[30]。采用Canny边缘检测算法构建分割对象,实现图像的分割处理。这是一种自上而下的分割方式,针对的是“对象”而不是传统意义上的像素。图像分割尺度参数的设置直接决定图像中对象的个数及颜色的色相范围,分割尺度参数根据图像分辨率、树种类型及所占图像比例等确定,依据分割尺度设置可决定分割对象的大小这一规律,根据试错法分析所有分割结果,由最终分类精度确定图像分割质量最佳的参数为:分割尺度设置为29,合并尺度设置为75;卷积纹理核大小设置为9。面向对象分割结果见图4。
2.3 分类器选择
支持向量机(support vector machine,SVM)是一种以统计学习理论(statistical learning theory,SLT)为基础的机器学习算法[31]。选择核函数为径向基函数(radial basis function,RBF)。径向基函数通常定义为空间中任一点x到某一中心xi之间欧氏距离的单调函数 ,可记作K(||x-xi||)。
K(x,xi)=exp(-r‖x-xi‖2),0.1≤r≤1.5
(10)
支持向量机主要包含2类参数:惩罚系数C和自带参数gamma,其中C是一个大于零的浮点型数据,指对分类误差的宽容度,C越高,说明越不能容忍出现分类误差,考虑惩罚系数设置过小会降低分类精度,但设置过大会导致未分类地物增多,最终将惩罚系数设置为10;gamma是选择径向基函数作为kernel后,该函数自带的1个参数。值越小,支持向量越多,值越大,支持向量越少。支持向量的个数会影响训练及预测的速度,将gamma设置为0.5。
2.4 树种分类结果分析
图5a和图5b为可见光影像基于颜色特征+纹理特征、颜色特征+纹理特征+几何特征的分类结果,图5c和图5d为特征融合图像基于颜色特征+纹理特征、颜色特征+纹理特征+几何特征的分类结果。通过分类结果图5a和图5b可知,可见光影像分类结果存在椒盐现象及边缘效应,如三球悬铃木的种植区位于左下部试验区,结果图中显示三球悬铃木均布在整个试验区,错分明显。由图5c和图5d和表2可知,特征融合图像树种分类精度提升,最高总体精度达98.27%,Kappa系数为0.98。
2.5 树种分类精度评价
根据拍摄当天实地调查结果对试验区域多类树种进行样本标记。训练样本对象为分割后的样本块,样本选择能代表其所在区域的树种特征,裸地选择样本37个,矮冬青选择样本124个,三球悬铃木选择样本81个,紫叶李选择样本54个,阴影选择样
本35个,马尾松选择样本38个。验证样本需避开上述训练样本选择区域,考虑像元的均质性,将样区大小设置为20×20 pt,选择样本点均匀分布在试验区域内[32]。根据各类地物在试验区域的分布特征,最终选择1 763个样本组成验证样本集,其中矮冬青树选择样本607个,三球悬铃木树选择样本304个,马尾松选择样本93个,紫叶李选择样本285个,裸地选择样本303个,阴影选择样本171个。利用验证样本集对分类结果进行验证,并采用混淆矩阵(confusion matrix)[33-34]评价分类结果。混淆矩阵中主要的2个评价指标为:总体分类精度、Kappa系数。
由表2可知,4种特征集的分类结果中,特征融合图像分类精度均高于可见光影像,即利用特征融合图像分类效果最佳。利用3类特征分类时,特征融合图像的最佳分类特征集为颜色+纹理特征,可见光影像中颜色+纹理+几何的特征集分类精度最高。
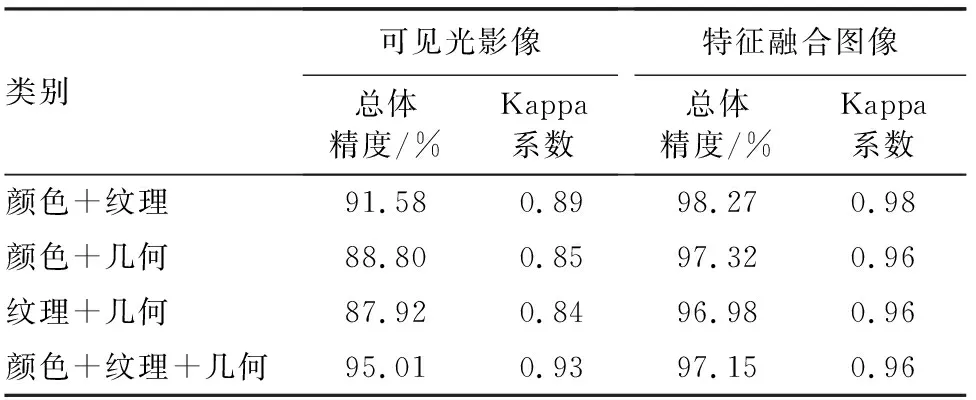
表2 不同图像提取总体精度及Kappa系数
表3为各类树种的分类精度比较,能够看出可见光影像和特征融合图像中裸地分类精度均大于95%;比较矮冬青分类精度,特征融合图像比可见光影像分类精度提升约14.7%,可见光影像中误分为马尾松的区域得到正确区分;特征融合图像的马尾松分类精度提升幅度约为15.7%,主要将误分为矮冬青的区域纠正。

表3 各地物分类精度
3 结论与讨论
利用无人机获取的可见光影像与DSM图像进行特征融合,采用面向对象法基于颜色、纹理和几何3项特征进行树种分类。分析比较了3项特征不同组合的分类精度。
与可见光影像相比,DSM特征融合图像能丰富图像的高程信息量,在减弱数据椒盐噪声的同时,可有效提高各树种间的区分度。
采用面向对象分类方法,当特征集选择颜色特征和纹理特征组合时分类精度最佳,分类精度为98.27%,Kappa系数为0.98。
由表3可知,DSM图像对于误分斑块具有良好的抑制作用,其分类优势在马尾松中得到明显的体现,混淆矩阵结果表明特征融合图像中马尾松的分类精度为94.64%,远高于可见光影像的分类精度78.94%。由图5a和图5b分类结果能够看出可见光影像分类结果中马尾松具有严重碎斑块,特征融合图像马尾松区域平滑完整。图5d分类结果显示,将三球悬铃木部分种植区误分为马尾松,研究认为是大量冗余特征作用所致。由于本研究中利用的数据源为无人机可见光影像,树种光谱信息量较少,因此树种提取结果仍存在部分误差,在今后的研究中尝试利用多光谱、高光谱数据进行树种的提取,进一步改进分类算法,提高树种提取精度。
综上所述,采用面向对象结合特征融合图像提取树种信息是可行的,该方法对可见光影像的分类精度较高,并且对树种高程信息具有较高的敏感性,可为实现树种计数、统计、分类提供数据参考。
