茶叶采摘技术及采茶机械研究进展
2022-02-08王小勇汤丹丹
王小勇,汤丹丹
(江西婺源茶业职业学院,江西 上饶 333200)
随着我国经济社会的不断进步,国民对茶叶的需求不断加大,据中国茶叶流通协会统计,2021年中国六大茶类总产量为3063 kt、产值2928.14亿元。面对茶叶生产形势稳定向上的局面,制约产业发展的一些突出问题亟待解决。受农村空心化、人口老龄化、劳动力短缺、人工成本持续上升和疫情的影响,据统计,2021年我国老龄化人口已占全国人口的18.9%,采茶工日薪更是高达170~240元。依靠手工采茶显然已经不能满足茶叶生产需求,茶叶采摘机械的研发与推广是解决以上问题的一种方法。为此,研究学者加大了对采茶机械的研究,截至目前已有多种类型采茶机械投入到实际生产中。采茶机械的使用不仅节约了人工成本,还大幅度提高了采茶效率,在一定程度上取得了较大的经济效益。
采摘是茶叶加工过程中十分关键的环节,对茶叶的外形、品质等有很大影响。不同种类名优茶对茶叶鲜叶规格要求不同,相应地对机械化采摘提出更高要求。与传统人工采摘相比,机械采摘具有结构简单、采摘效率高、易于操作等优点。本文结合现有茶叶采摘技术及机械,分析茶叶采摘机械结构与原理,指出其存在的问题并展望采茶机未来发展趋势,为采茶机的创新设计提供参考。
1 采茶机械研究现状
茶叶采摘是茶叶加工生产环节中耗时最多的一项作业,常用的鲜叶采摘设备是采茶机,它是从茶树顶梢采收新嫩芽叶的作物收获机械。采茶机按工作原理分为折断式和切割式2种,折断式采茶机由于采净率较低,并且会对茶树造成损伤,现已使用较少;切割式又分为往复式切割、螺旋滚刀切割、圆盘刀切割,其中往复式切割机采鲜叶完整率和作业效率要优于其他二者,现已被广大推广。
1.1 国外茶叶采摘机械研究现状
日本在二战后开始加快采茶机械的研究,1960年诞生第一台采茶机,1966年之后陆续研究出双人采茶机、自走式、乘坐式采茶机,并开始在茶园中进行运用。根据采摘原理的不同,日本已经研制出往复切割式采茶机、螺旋滚刀式采茶机、水平圆盘刀式采茶机等多种类型的茶叶采摘设备,目前日本茶叶采摘基本实现机械化[1]。
前苏联在1949年之前都采用切割式原理的采茶机,之后对采摘原理进行创新,采用橡胶折断式原理对茶叶进行采摘,1965年研制出折断与切割相结合的自走式采摘机械,并在茶叶采摘中使用[2]。
伴随计算机视觉、人工智能等高新技术的发展,在农业领域,利用机械手进行采摘果实蔬菜等采摘机器人已经投入使用,名优茶智能采摘将是国外未来的发展趋势。例如,KURENA M等[4]提出了一种根据茶叶、叶柄和枝条状况生成茶叶采摘运动的方法,主要通过机器人示范学习来再现采茶过程的提拉与转动。MANESH M等[5]设计一种用于智能采摘茶叶的半自动化系统,通过前期的关键帧提取、大米计数、光流与噪声等预处理,并结合深度学习实现茶叶的智能识别与采摘。ABESINGHE A M S K等[6]结合图像处理,开发了一种在茶园可以识别茶叶并完成采摘作业的设备,在无人机上安装机械臂与摄像头,利用Haar级联分类器和图像处理技术对可采收标准芽进行识别,最后由机器人手臂完成采摘。
1.2 国内茶叶采摘机械研究现状
由于我国采茶机械的研究起步较晚,直到20世纪50年代,对采茶机的研究才正式开始,目前我国采茶机主要以切割式、可搬式为主,山地茶园应用单人背负式采茶机(图1-A),平地缓坡地茶园应用双人抬式采茶机(图1-B)。

图1 两种常用采茶机Fig. 1 Two commonly used tea plucking machines
单人背负式采茶机由汽油机、背负机构、软轴、切割机构、风机、导叶板、集叶袋等部分组成,属于往复式切割采茶机,其工作流程为:工作时汽油机输出动力,由软轴将动力传递到切割机构上,带动刀片往复切割,同时带动风机转动,吹风管将风吹向刀片切割口处,将切割后的茶叶吹向集叶袋[7]。现使用较多的机型有浙江川崎茶业机械有限公司生产的NV45型和NV60型单人采茶机,采用风冷汽油发动机,功率0.8 KW,二者区别在于采茶幅宽,NV45型采茶幅宽为450 mm,NV60型则为600 mm;浙江落和农林机械公司生产的AM45V和AM110V型单人采茶机,前者割幅450 mm,后者525 mm,二者发动机功率都是1 KW。
双人抬式采茶机由汽油机、风机风管、减速机构、切割器、机架等5部分组成。属于往复式切割采茶机,其工作流程为:工作时主把手操作者运行控制开关,控制开关上有离合器、油门、停机手柄,副把手操作者调整切割角度,汽油机通过减速机构后将动力传递到偏心轴,偏心轴驱动刀片往复运动,同时汽油机驱动风机运转,产生气流,通过通风管将切割器切割下的茶叶送入集叶袋中[7]。现使用较多的机型有浙江川崎茶业机械有限公司生产的SV100弧形双人采茶机,采用TC510汽油机汽油发动机,功率2.2 KW,采茶幅宽为1000 mm,采茶过程叶芽完整率达到92.94%;浙江落和农林机械公司生产的V8NewZ2型双人采茶机,采茶幅宽为1000 mm,功率3 KW,整机重量11.9 kg,较浙江川崎茶业机械有限公司生产的SV100机型10.2 kg要重一些。
2 采茶机械发展及研究进展
本文重点从采茶机的行走方式、采茶机机架、切割器、集叶装置、智能控制等部分中分析其对茶鲜叶采摘的影响。
2.1 行走方式
采茶机按不同行走方式可分为可搬型、自走型、乘用型;可搬式采茶机结构简单,价格便宜,又分为单人背负式、双人抬式,属于半机械化机采作业。乘用式行走机构多以履带轮行走,自走式多以茶行铺管,行走轮沿茶行钢管行走。
吴先坤[8]研发了一款履带自走式茶园采茶机,传动系统采用橡胶履带底盘,其结合了低山丘陵地区的特点进行了田间试验,试验结果表明前进速度1.98 km·h-1、割幅长度1.0 m、刀片往复频率1400次·min-1,通过实验可知,此时的芽叶完整度为88.4%,功耗为2.776 kw,采摘效果良好。
吴先坤等[9]研制了一款单人背负式采茶机,该机主要由发动机、传动软轴、风机风管、往复式切割器及集叶袋等装置组成,试验结果显示该设备漏采率在2%左右,可制茶率大于93%,芽叶完整率大于85%,具有结构简单、操作方便、体积小等优点。
李兵等[10]发明了一款乘坐式采茶机,该设备由机架、动力装置、切割系统、集叶系统和行走系统以及驾驶座、方向盘、蓄电池组成,传动系统由中央传动总成和左、右传动总成组成。该设备具有劳动强度低、采茶效率高和成本低的特点。
刘芳[11]设计了一款液压自走式采茶机——3TG-1500型高地隙田园管理机,其结合和借鉴当前国际上先进成熟的液压系统设计经验,是全液压驱动的乘用式跨行行驶采茶设备,其行驶灵活,调节方便,适合标准化茶园的茶叶采摘,还能满足长时间的茶叶采摘。
2.2 采茶机机架
采茶机机架是采茶机械的搭载平台,其茶叶采摘过程中的稳定性间接影响采摘质量。
韩余等[12,13]设计了一种跨行履带自走式采茶机,行驶系统与采摘系统均采用液压传递动力,结合高地隙底盘,使采茶机可跨茶蓬行驶,通过ANSYS对设计“门型”机架(图2-A)进行了静力学强度振动特性分析,将采茶机外部激振源的频率相互错开,使机架在采茶机正常作业时不会发生共振,该机型其最大调速范围为0.151~5.072 km·h-1,满足动力传递、换向及速度控制要求,具有质量轻、地隙高、重心稳定等特点。黄升等[14]为了解决传统采茶机在工作过程中油耗噪音大、易受地势限制不易操作等问题,设计了一款自走平衡式采茶机(图2-B)。采茶机的自走系统采用后驱动,并在自走系统上搭载自走和转向的作用平衡系统,实现自调平衡和自行走,通过单动式剪切茶叶,实现自动收茶。宋扬扬等[15]针对传统采茶机受地形限制严重,茶梢和嫩芽采摘过程容易损伤等问题,设计了一种单轨悬臂式采茶机(图2-C)。行走机构是由履带、底盘、汽油发动机、传动装置及操作装置等组成,当采茶机前进速度为3.78 km·h-1、切割器往复频率为25 Hz时,采摘性能良好。履带行走通过性强,稳固性好,降低了劳动强度,提高了茶叶产量和经济效益。
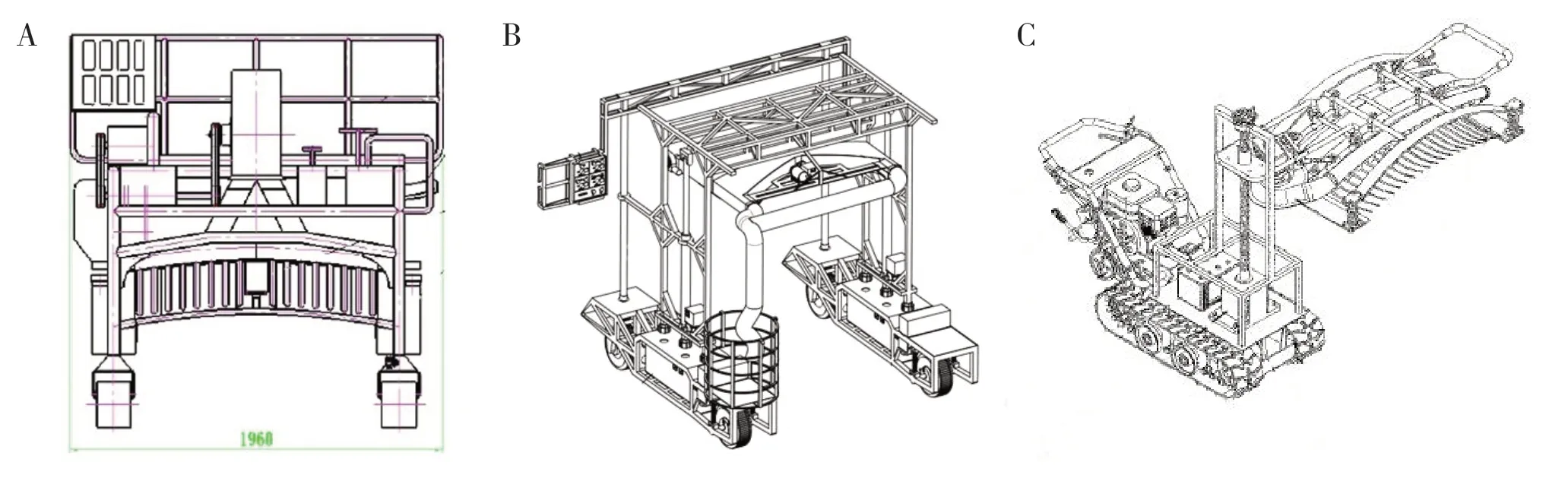
图2 3种不同采茶机搭载暯洦Fig. 2 Three patterns of tea plucking machines
2.3 切割器
切割器是茶叶采摘设备的重要组成部分之一,切割器的结构材料性能对茶叶采摘效率、茶叶切割区域的分配、茶梢破碎率的降低具有重要的影响。切割器按照采摘原理分为折断式与切割式,前者是选择性采摘,后者是非选择性采摘。折断式通过弯曲力折断茶叶幼嫩部位,能够保证芽叶完整、嫩度一致,但因易使茶芽折而未断而造成茶树损伤,需要进一步提升采茶机的茶芽识别技术;切割式通过刀片对茶树进行平面切割,切割面平整,但无法区分芽叶老嫩,切割式又分为往复切割式、螺旋滚刀式、水平圆盘刀式三种。
杜哲等[16]为了降低茶叶采摘的漏割率和重切率,研究了一款便携式双动割刀往复式切割器,切割器的传动机构为曲柄连杆机构,并结合ADAMS对切割器进行运动仿真和田间试验,当切割器齿距20 mm、齿高19 mm和刀机速比1.05时,茶叶采摘过程中一次切割率、重割率和漏割率达到最优水平。李长虹等[17]为了提高茶叶采摘后的完芽率,研究了一款便携式双滚切刀采茶机,对双切滚刀进行了运动轨迹分析,提出影响茶青破碎率的参数为底刀高度h、工作半径R和人机速度之比,将人机速度之比取值控制在0.275~0.4范围时,采茶机所采茶青可达到优质茶青采摘标准。张晓伟等[18]针对采茶的劳动强度大,采茶效率低等问题,设计了一款滚切刀式采茶机,运用soliderworks软件双滚刀建模并进行实验分析,当滚切刀工作半径为50 mm,刀片宽度为60 mm,厚度为1.5 mm时能够有效降低采茶强度,缩短采摘工期,同时减少茶叶破碎率。于鹏等[20]针对往复式茶叶切割器采摘质量难以保障的缺点,根据茶叶生产参数的统计,利用计算机辅助分析软件(CAE)设计了一种打叶杆式茶叶收割装置,打叶杆的直径为10 mm,长度600 mm,所选材料为45号钢,安装在圆盘上,工作时电动机带动圆盘上的打叶杆转动,将茶叶打至叉子上,使茶叶被折断,再由负压原理将茶叶吸入储料箱,采用滚切式的切割原理进行采摘,并通过有限元分析和试验得出,当打叶杆的回转半径为60 mm、切割高度为34.2 mm,打叶杆转动设计最佳线速度为1.6 m·s-1,打叶杆直径为10 mm时能够有效降低了重切区和漏采区,提高了茶叶采摘的质量。刘俊锋等[19]针对名优绿茶在采摘过程中对茶叶缺乏识别的问题,设计一款茶叶仿生采摘指,采茶机器人进入采摘区域,利用机器视觉对茶梢进行识别,然后将采摘手指送至采摘位置,当上夹爪和下夹爪完成茶叶的夹持后,通过气缸带动里层套向上运动,完成茶叶采摘,仿生采摘试验成功率达90%。
对上述不同切割器的结构特点进行总结,如表1所示。研究与实践表明,目前生产上应用最为广泛仍是往复式切割式采茶机。
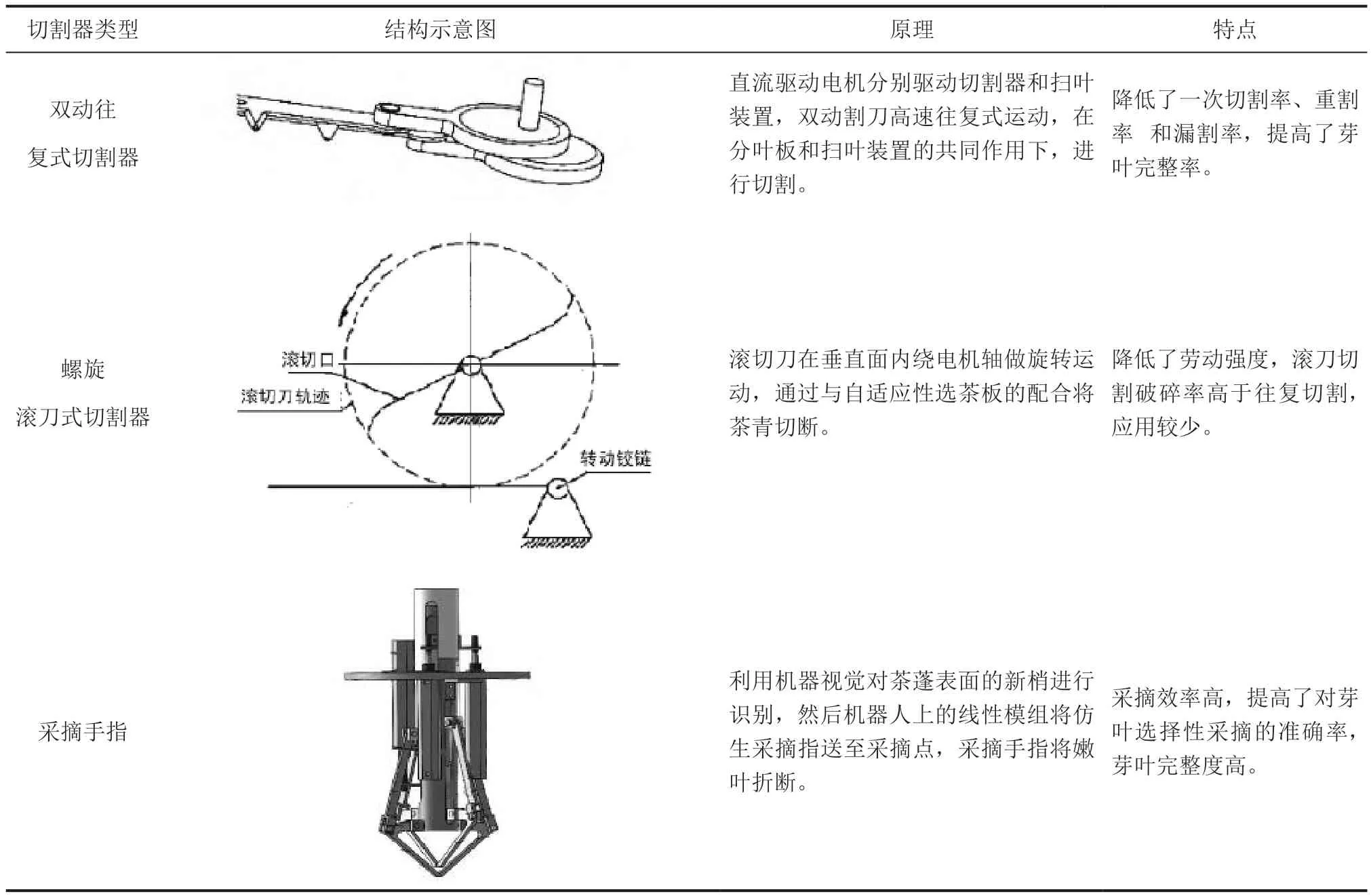
表1 不同类型切割器比较分析Table 1 Comparison and analysis on different types of cutters
2.4 集叶装置
集叶装置的作用是及时将采摘后的茶叶通过风力或真空负压吹(吸)入集叶袋中。风速、压力的大小以及均匀度对茶叶的收集具有重要作用。
欧阳爱国[21]为了解决茶叶采摘过程中堆积在收集板上的问题,设计了一款单轨悬挂式采茶机结构(图3),并根据动力学原理对其风管流场进行了仿真分析,得出结果为:通风管进风口的最佳送风方式为两侧送风,出风口的最佳弯管直径为16.8 mm时,能够提高茶叶在采摘后进入到收集袋中的输送能力。邵福[22]则针对目前采茶机通风管道结构设计不合理、各支管出口速度分布不均匀等问题,对现有通风管结构进行结构优化,利用SolidWorks和FLUENT软件对通风管道内部流场的三维数值进行模拟,当主管入口风速为22 m·s-1、主管锥度为1∶80、支管个数为10、支管直径为15 mm时,通风管道速度不均匀系数相对于原通风管道降低了9.77%。刘浩等[23]采用真空负压吸附的方法来解决茶叶收集难的问题,利用吸风装置使茶叶通过管道进入茶叶收集箱(图4)。运用GAMBIT和FLUENT对真空吸附装置进行网格化分与茶叶流动仿真模拟,经试验验证得出:真空度随茶叶流量增加而降低,吸入功率随茶叶流量增加先增后趋于平缓。
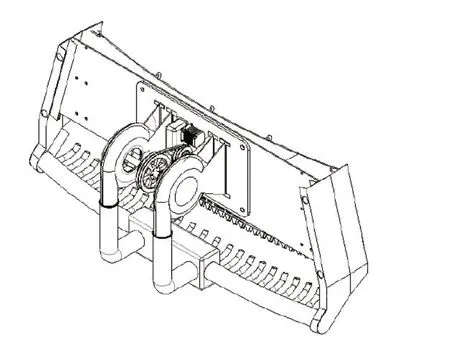
图3 单轨悬挂式采茶机集叶装置结构Fig. 3 Basic structure of rail-suspended tea plucking machine
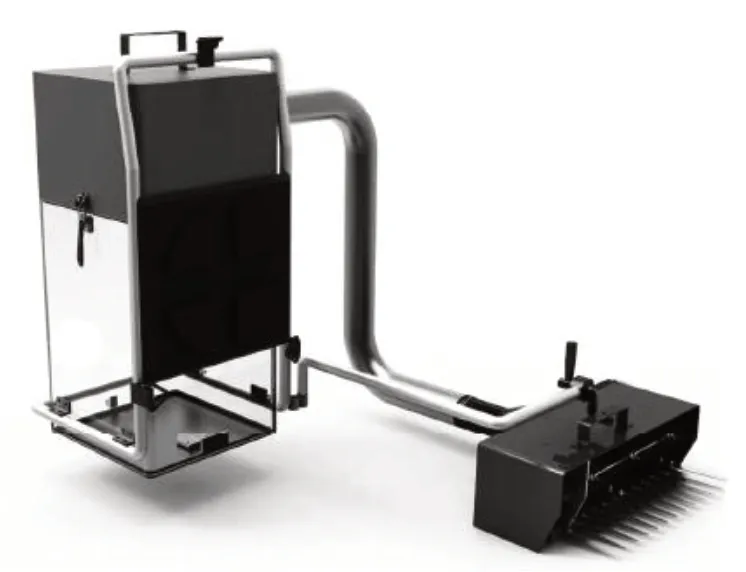
图4 便携式真空吸附采茶机Fig. 4 Portable vacuum absorption tea plucking machine
2.5 采茶机智能控制技术
随着时代的发展,名优茶的需求越来越高,但名优茶对茶叶采摘要求十分严格,传统的机械采茶会对茶叶嫩梢有伤害,并且无法保证采摘规格的一致性,因此,能够智能识别茶叶嫩芽并且对茶叶嫩芽进行三维定位采摘的智能型采茶机器人便提上研究日程,目前采茶机智能技术重点在于采茶机自动导航技术和茶叶采摘智能识别技术两方面。
秦广明等[24]设计了一款自走式智能田间采茶机器人,通过图像处理系统获取嫩芽采摘点,使用三维驱动机构精确定位,带动机器手实现茶叶采摘,负压茶叶收集管实时收集嫩茶,采用自适应调节液压行走系统,具有定位时间短、精度高、采摘效率高等特点,田间试验结果表明,其平均误识别率为28.7%,单手采摘次数为1.29次·s-1、整机生产效率(鲜叶)为5.254 kg·h-1、漏采率为2.66%、摘后收集率为99.6%、老梗叶率为0.8%、茶芽完整率为76.6%,各项性能指标均满足设计要求。王焜等[25]研究了一款采茶机器人,采用三自由度并联机构和末端采摘器,通过MATLAB软件,得到了采茶机器人工作空间的三维图,并建立机器人仿真模型以及机器人轨迹仿真,满足工作空间可视化的特性,提高机械采茶效率稳定性。王先伟等[26]为了实现其在室外环境下导航避障及路径规划,使用改进的ORB-SLAM2算法进行机器人自身定位与三维点云地图的构建,并将三维点云地图转换为八叉树地图,在八叉树地图上实现采茶机器人的碰撞检测算法与路径规划算法,并进行了试验,试验结果显示可以满足采茶机器人导航避障及路径规划要求。汤一平[27,28]提出一种基于机器视觉的机采茶陇识别与采茶机导航的方法,配置摄像头以获取待采摘茶陇的视频图像,并对其视频图像进行算法处理,提取出茶陇的左右边缘线并计算出茶陇中心线,并显示其采摘状态。试验结果表明此法能有效解决目前机采茶叶老嫩茶叶一刀切的弊端。王伟羊[29]研究了一种基于计算机视觉的采茶机导航技术,采用java语言、图像处理、茶陇分割等方式找准方向,并提示驾驶员,提高切割的完整性,减少茶叶的损伤。周俊[30]研究了一款采茶机器人,将视觉与IMU融合,进行采茶机器人位姿的估计研究,采用OKVIS算法,可实时测量机器人的位姿和速度,并且绘制出机器人的移动路径,在试验中运行良好。汪琳等[31,32]将SCARA采摘机械手应用于茶叶采摘,充分发挥每个自由度的作用,添加叶芽梳理机构,在作业过程中将叶芽与老叶分离并初步固定,通过视觉图像处理系统识别和定位浮于梳理机构上方的叶芽,实现智能采摘。韩旺明[33]研究了一款智能化自动切割式采茶机,使用一系列图像预处理算法并利用OTSU对整幅图像进行处理,得到嫩叶区域,后对割刀进行调节;同时针对南方地区不同季节茶叶的生长特征以及采摘方式,还设计了固定采摘模式和智能调节模式。该设备不仅降低了茶叶采摘时的劳动强度,还节约了劳动成本,在对茶树不造成机械性损伤的情况下可提高茶叶整体品质。张修[34]研发了一款基于机器视觉的智能采茶机器人,通过图灵智造四轴工业机械手加上“一目多位”式的三维立体视觉系统,以及图像的三维重构,提高采茶机器人识别芽叶的能力,图像的匹配度可达90%以上。
3 存在问题
当前,采茶机械发展提升到一个较高水平,一些新技术新机具在茶叶采摘中得到逐步推广,但仍然存在一些问题。
一是茶叶采摘机械在切割器和整机结构上创新不足。虽然有很多研究者对茶叶采摘设备的切割器进行设计改进,但是效率较往复式切割器还是有一定差距,而往复式切割器的刀片在往复式运动过程中会存在惯性力以及振动噪音等问题,不仅影响采摘质量,还对茶叶造成二次伤害,当前采茶机切割器研究重点已转向智能化识别鲜叶老嫩和选择性采摘机构,然而芯片的造价成本过高、算法的级别过低等问题制约切割器的发展;并且采摘后鲜叶的收集过程存在堵塞以及杂质过多等问题也影响采摘效率。
二是茶叶采摘机械功能单一、智能化程度低。目前市场上无论是背负式还是乘坐式或者手抬式采茶机,基本只具备采茶这一单一作业功能,而整个采茶季节时间较短,长期存放易损坏,不利于循环利用;其次,各地茶园种植规格不统一、茶区地形复杂,适用于丘陵山区茶园的机械设备依然较少,大部分茶园机械设备无法在山区进行正常工作,导致山区茶园采摘效率低。另外,在茶叶采摘环节中,采摘的过程、茶叶的长短与大小等的选择仍是通过人工操作,智能化水平低。
三是茶叶采摘标准、种植标准以及茶叶机械标准滞后。目前茶叶采摘过程以及茶叶采摘机械缺乏统一的标准,各个茶机制造企业没有注重茶叶种植、采摘、加工等环节之间的衔接,农机农艺之间结合度较为落后,间接增加采茶机械的研发难度;各个茶机制造企业之间、企业与研究机构之间缺乏沟通,造成茶叶采摘机械所使用的零配件在通用性和标准上缺乏统一。
4 发展趋势
采茶机械在整个茶产业中扮演着至关重要的角色,智能型采茶机器人的研发与推广推动了茶叶加工领域高速发展的进程,针对茶叶采摘技术及机械,未来发展呈现以下几个发展趋势。
1)加强智能化采茶机的研发,运用大数据、深度学习等高新技术,融合互联网、物联网等平台,加强智能传感技术的运用,研发更高级别的智能算法,提高芯片等级,降低切割器的造价成本,实现对芽叶有选择性的采摘并能自主完成采摘作业,实现智能化识别鲜叶老嫩,并通过选择性采茶机械手完成芽叶“准、快、稳”采摘作业要求,降低芽叶破碎率,从而实现名优茶机械化采摘,提高名优茶机械采摘质量。
2)加强特色机型与多动能机型平台的研发,针对坡度大的山区及丘陵,在农机农艺结合的基础上,因地制宜,研发适用于山区及丘陵的采摘机械,并使采摘机械外型适应采摘环境,提高茶园机械化水平;研发实现其耕作、施肥、采摘等作业多位一体的多功能茶叶机械,不仅能使茶园机械使用次数增加、提高作业效率,更能节约成本。
3)充分利用大数据平台,加快茶叶采摘技术、采摘机械标准的相关制订工作。由于茶叶采摘技术、采摘机械标准滞后的问题严重影响茶叶采摘质量,因此,茶叶采摘机械未来发展趋势中要解决采摘标准、种植标准以及茶叶机械标准的适应性问题,加强各个茶机制造企业之间、企业与研究机构之间的沟通,实现数据共享,建立统一的茶叶采摘机械,甚至是茶叶机械的数据平台。
5 结论
总而言之,我国茶叶采摘机械研究进步较为显著,基本能实现大宗茶机械化采摘,促进茶叶机械领域发展。但是名优茶机械化采摘在实际应用中仍面临诸多挑战,茶叶采摘机构的创新仍然存在瓶颈,采摘过程中机械设备振动噪音污染问题仍然存在,相关科研机构应该加大茶叶智能化采摘研发投入,加强茶叶机械领域人才培养以及茶叶采摘理论创新,实现茶叶采摘机械的智能化发展。
