惯性导航设备动态标校方法
2022-02-03陈杨科
雷 雯,陈杨科
(海军装备部驻湘潭地区军事代表室,湖南湘潭 411100)
0 引言
舰船惯性导航设备是利用惯性器件来确定舰艇的艏向、位置和速度的自主式导航设备,是全天候导航设备,具有工作不受地域、气象条件限制和外界的各种干扰等突出优点。惯性导航设备是当前海军最主要的导航设备,其性能优劣关系到舰船航行安全和作战武器设备的性能。惯性导航设备(包括激光惯导、平台罗经和局部基准等)上舰时航向和水平安装标校精度是影响惯性导航设备性能一个重要的环节[1]。所以长期以来,惯导设备准确标校方法始终是海军和设备研发单位十分关注的问题。
根据舰船状态惯性导航设备安装标校主要分静态和动态标校2种[2-3],其各自的条件及性能优劣情况见表1。

表1 动态标校环境优缺点对比表
由表1可知,动态特别是码头系泊情况标校对于整体进度和要求有很明显的优势,但受标校方法的限制使得标校精度不高。因此,长期以来,导航设备的标校只能在船坞内进行,导致设备存在标校周期长、程序复杂、难度大、不能按需要及时予以标校等问题。
传统的惯性导航设备的标校方法是在静态条件下通过经纬仪和水平仪等测量仪器配合,利用机械调整方式完成安装标校。这种标校方式可以满足大部分平台罗经等中低精度导航设备的标校要求,但难以满足高精度惯性设备标校要求[4-5]。因此,亟需针对惯性导航设备特点研究出一个舰船在静动态条件下实现惯性导航设备高精度标校方法,解决传统标校方法带来的问题。
本文提出的数字化安装标校方法是结合目前主流舰艇激光惯性导航设备的工作原理及结构形式提出的一种满足舰船静动态条件高精度的标校方法,主要解决了动态精度不高的问题,同时大大减少标校时间,提高适装性。
1 标校原理
舰载惯性导航设备标校是通过特定的仪器仪表,采用合理的安装标校方法使惯性导航设备输出基准与舰基准相互一致的过程[6]。因此,要讨论安装标校方法首先需从设备输出基准和舰基准开始研究。
1.1 基准建立
舰基准包括方位基准和水平基准,舰船方位基准主要由舰方位基准镜或艏艉刻线表征,方位基准镜是舰船建造时安装,其法线方向通过光学方法将舰船中心艏艉线引入得来,其安装结构见图1。水平基准由舰水平基准平台表征,如图2所示,延舰船艏向方向相对于地平的倾角为纵倾角,垂直于艏向方向的右舷相对于地平倾角为横倾角。舰基准坐标系与地理坐标系一致,定义艏高为正,左舷高为正。

图1 舰方位镜安装示意图(单位:mm)

图2 舰水平基准俯视图
由方位镜和舰水平基准即构成舰基准坐标系(O-xbybzb)。如图3所示,舰基准坐标系x轴指向右舷,y轴指向舰艏,z轴依右手坐标系向上。

图3 舰基准坐标系图
1.2 惯导设备基准建立
以舰艇激光惯性导航设备为例,设备输出基准包括方位基准和水平基准。如图4所示,设备方位基准由图中标识的标校镜表征,水平基准由红色的水平检测平台表征。惯性设备在生产调试时通过数学方法将惯性本体输出统一到标校镜和水平检测物理平台上。通过陀螺经纬仪对准标校镜测量和水平仪在水平检测平台上的测量得到的值与设备输出的方位、水平值一致,因此设备上的标校镜和水平检测平台共同构成了惯导设备的输出基准。
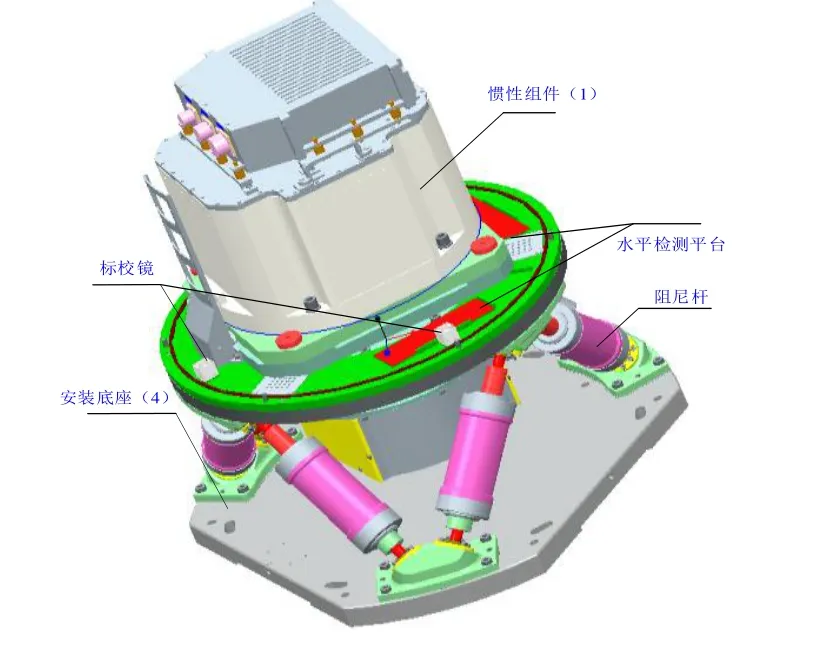
图4 惯性装置示意图
2 传统安装标校方法
传统惯导设备安装标校方法见图5,主要是基于电子陀螺经纬仪、差分水准仪和方位基准镜进行惯性安装和对准的精度控制方法。设备出厂时提供平台坐标系方向基准和水平基准其方位和水平标校方法如下。
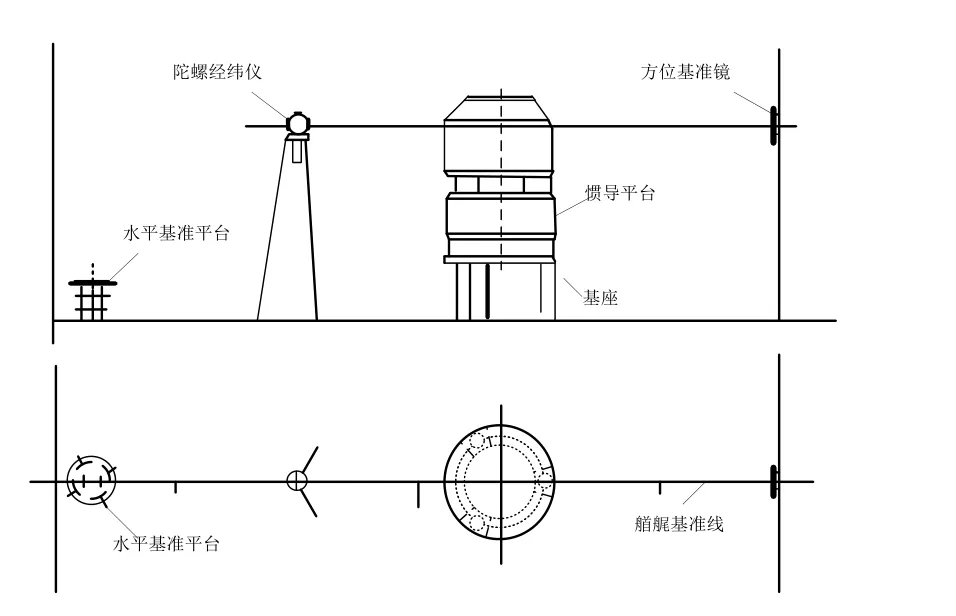
图5 传统标校方法示意图
1)方位标校调整如图6所示,A为陀螺经纬仪光管中“十”字分划板,B为A经过舰方位基准镜反射后回来的像,C为A经过舰方位基准镜和惯导标校镜两镜子反射回来的像。标校时需先将调整陀螺经纬仪先将B与A完全重合,此时陀螺经纬仪的读数即为舰方位真值。A、B重合后再次挪动惯导平台上的方位和水平环架机构使C像与A、B重合即认为设备方位与舰基准方位对齐。
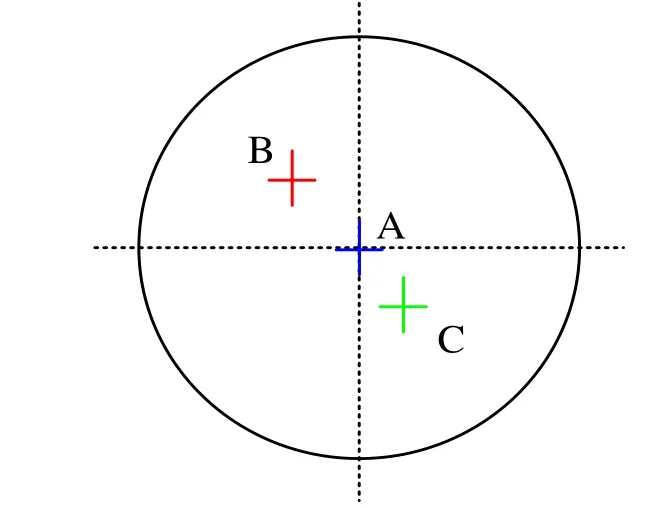
图6 方位标校示意图水平调整
2)水平标校调整
在方位对齐后利用惯性水平基准以及舱室主水平基准面进行水平调整,沿同一方向正反两次分别将差分水平仪安放在检测主基准面和惯性平台被测面,所测倾斜角值取均值,一般在设备底座与安装基座间用楔形垫块调整水平。
水平标校调整主要存在以下2个难点:
(1)方位与2个水平方向共同构建惯导的平台的输出坐标系,当方位调整满足要求后,水平任意一个方向调整都会对方位和水平另一个方向造成影响,因此需要反复调整才能满足对齐精度要求。
(2)设备方位、水平与舰船方位基准、水平基准对齐后,需利用划线工具,确定惯性平台基座垫块连接螺栓的位置,移去惯性平台设备进行现场配钻。在惯性与基座固定后,应再次按上述步骤调整并复核方位和水平对齐精度,实际标校时往往因舱室空间限制调整难度很大。
传统标校方法标校精度,惯性方位与舰船方位基准对准精度在±30″内,水平精度在±1′内。
3 动态安装标校方法
3.1 动态标校原理
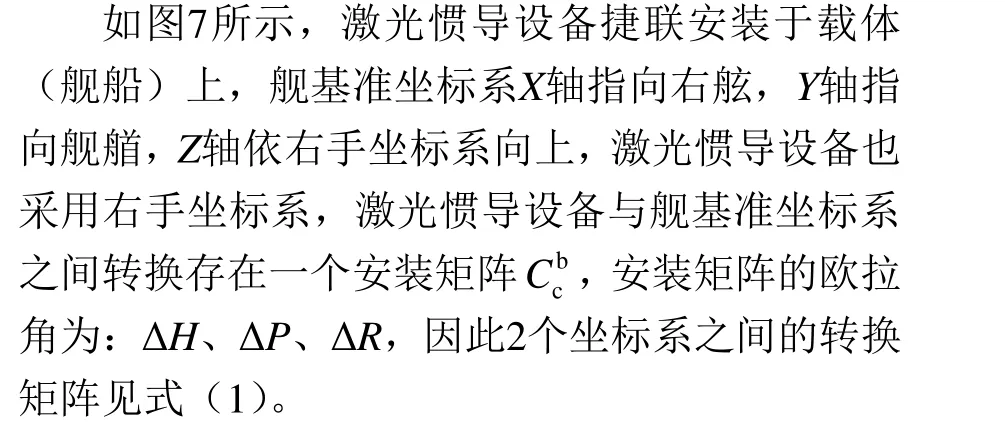

图7 设备安装误差角示意图
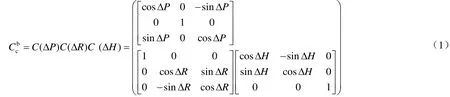
数字化动态标校即找出两坐标系之间的欧拉角ΔH、ΔP、ΔR,将欧拉角参数输入到设备配置参数中,设备软件根据配置参数即可使得设备输出与舰基准保持一致。
3.2 动态标校流程
动态标校是指在船因完全下水使得测量仪器无法取得舰方位与水平姿态绝对基准值情况下而采用的一种标校方法,与静态标校方法类似,包含方位和水平调整。
1)方位调整
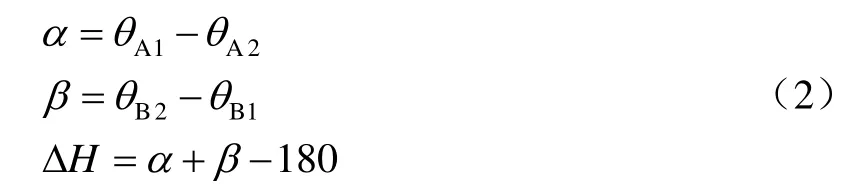
舰方位基准镜与设备方位基准镜不在同一线上时采用如图8所示的方式标校。将甲板经纬仪A、B分别放置在合适的位置,分别将两经纬仪调水平,能分别与甲板基准镜及惯性装置标校镜准直,经纬仪读数分别为θA1、θB2,再将两经纬仪进行互瞄准,其角度值为θA2、θB2,分别代入下列式中,微调惯导基座,使ΔH小于0.5°,即满足设备方位安装精度要求:
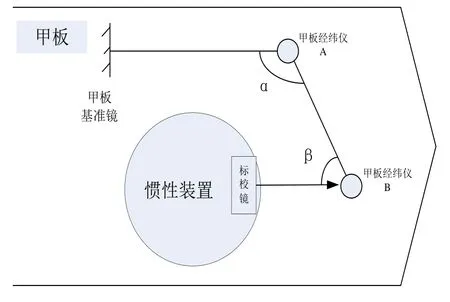
图8 动态标校方位标校示意图
2)水平安装
将惯性装置上壳体移开,用差分水平仪分别放置舰水平纵向基准面和惯性装置水平检验平台纵向基准面上,微调惯导安装面使得差分水平仪在纵向方向的读数值ΔP控制在±0.5°以内。同理,测量横向方向差分水平仪的读数值ΔR也控制在±0.5°以内,即满足设备水平姿态的初标精度要求。其示意图见图9。
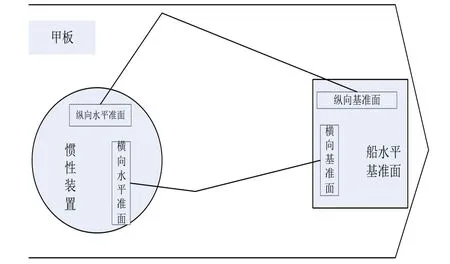
图9 动态标校水平标校示意图
3)方位与水平标校
通过初标,设备方位和水平在机械上与舰方位和水平基准值偏差分别控制在0.5°和0.5°以内,为使设备标校精度更高同时减少机械调整工作量,采用数字标校方式实现设备精标。步骤如下:
(1)设备开机稳定两小时后读出设备输出的纵横摇和航向P、R、H。
(2)将偏差角(ΔH,ΔP,ΔR)通过设备。
(3)显控发送装置装订,即实现惯导设备与舰基准统一。
动态标校精度在方位和水平上基本控制在20″以内。其误差主要是由于设备惯性本体与其水平方位基准之间的取齐偏差。
3.3 标校方法对比
本文提出了一种舰艇高精度航向和水平姿态测量和标校模型, 并根据该模型制定了高精度航向和水平姿态初始标校方案,解决了惯性导航设备在舰船静动态条件下高精度的标校问题,为提高导航设备的精度提供了全新的、有效的方法。新方法与传统标校方法对比见表2。

表2 标校方法对比表
4 实船交验
结合某任务加装在系泊状态下激光惯导采用动态标校方法完成设备安装标校工作,采用差分水平仪测出舰水平基准面和设备水平检测平台之间的差值,用光学经纬仪测出设备标校镜与舰方位基准镜之间的差值,因差分水平仪动态条件下存在随机误差,通过3次测量取平均值,并将平均值装订到设备中完成设备动态标校。进船坞半坐墩后用陀螺经纬仪测出舰方位基准镜方位值,水平仪测出舰水平基准面纵横方向两个值,将以上3个值与设备输出航向、纵横摇值进行比对,统计偏差值作为设备动态标校精度,其统计结果见表3。
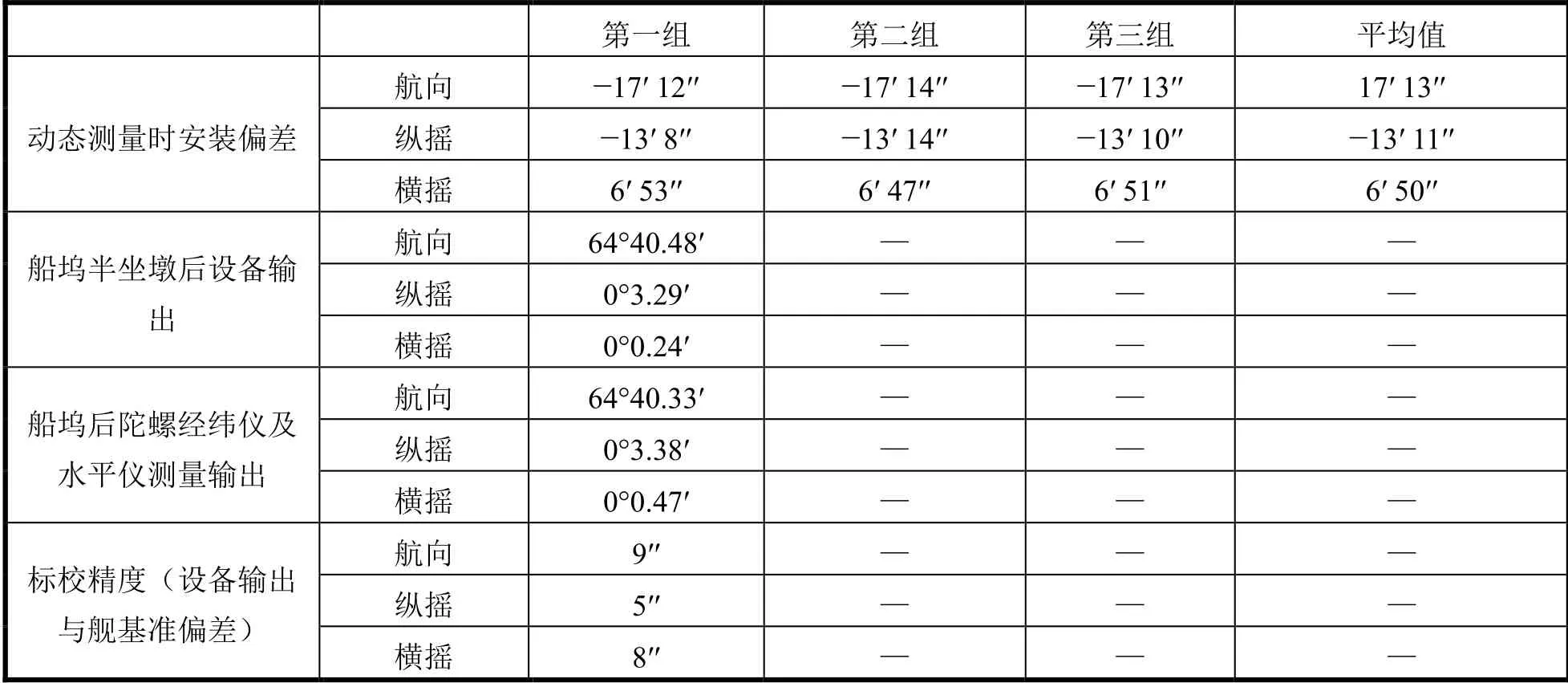
表3 动态标校结果表
5 结论
本文提出的高精度航向和水平姿态初始标校方案,解决了传统标校方法存在对船体状态要求高、周期长、机械调整难度大、程序复杂、仅能在静态环境下标校,且标校精度不高等问题。更重要的是解决了在舰船静动态条件下高精度的标校问题,为提高导航设备的精度提供了全新的、有效的安装标校方法。
1)数字化标校方法是建立在捷联惯导(激光、光纤等)的技术基础上高精度标校方法,具有广泛的通用性、先进性。
2)相对于传统的标校方法数字化安装标校方法要求低、操作简单、精度高,所内试验和实船交验情况充分证明了数字化标校方法的正确性和优越性。
3)数字化动态标校方法最主要的优点是解决了设备在舰船动态条件下的高精度安装标校问题,为激光惯导、光纤惯导等导航产品的外场安装标校工作奠定了重要的理论基础,具有重要工程实用价值。
