基于三阶PI的MRAS观测器的永磁同步电机无传感器控制
2022-02-02余乐乐王仲根沈志俊
余乐乐, 王仲根, 李 京, 沈志俊
(安徽理工大学 电气与信息工程学院, 安徽 淮南 232001)
与直流电机和感应电机相比,永磁同步电机PMSM(permanent magnet synchronous motor)具有结构简单、功率密度高、能效高、运行可靠等优点。随着永磁材料成本的降低和控制技术的发展,永磁同步电机在各种领域得到了广泛的应用[1-3]。PMSM的控制方法通常采用矢量控制,矢量控制需要实时获得转子位置。传统方法通过位置传感器获取转子位置,但安装传感器会影响系统控制稳定性,增加成本。模型参考自适应(MRAS)控制算法是实现高性能控制的算法之一[4]。文献[5]提出一种改进的灰狼优化(GWO)算法,通过构造积分型非奇异快速终端滑模面,用非线性指数函数来代替传统滑模MRAS中的开关函数。然后,用改进的GWO算法,对滑模面参数进行全局寻优。文献[6]提出一种采用扩张状态观测器代替传统PI观测器,以提高转子位置的估计精度和减小负载转矩扰动对系统的影响。文献[7]提出一种新型超螺旋滑模自适应观测器(STA-AO),在MRAS结构的基础上加入了反馈校正环节,在STA-AO中引入超螺旋滑模算法替代观测器中的PI自适应机构,提高了观测器的鲁棒性。文献[8]提出一种新的线性补偿器,推导出了新的转速自适应律,使得MRAS能够在宽速度范围内对转子位置和转速准确辨识。这些方法的提出有效实现了调速系统的高性能控制,它们有的使用了复杂的算法,使观测器设计复杂;有的缺乏通用性,在工程应用中存在诸多局限[9-11]。
本文提出一种基于三阶PI的MRAS观测器设计方案,在传统MRAS中引入三阶PI,以提高系统的跟踪精度和鲁棒性,抑制滑模抖振,最后通过仿真结果验证本文方案的优越性与可行性。
1 PMSM的模型建立
对于表贴式三相PMSM,在d-q坐标系下的状态空间表达式为:
(1)

式(1)的矩阵形式可表示为:
(2)
则可调模型可表示为:
(3)

式(3)的状态空间表达式为:
(4)
定义广义误差为:
(5)
由式(1)和式(4)相减可得电流估计误差表达式:
(6)

将式(6)写成状态空间表达式,可得到电流估计误差状态空间表达式:
(7)
(8)

(9)
2 基于三阶PI的MRAS观测器的设计
将MRAS观测器中引入三阶PI自适应律代替传统PI自适应律,有效提高了系统的动静态性能。三阶PI框图如图1所示。
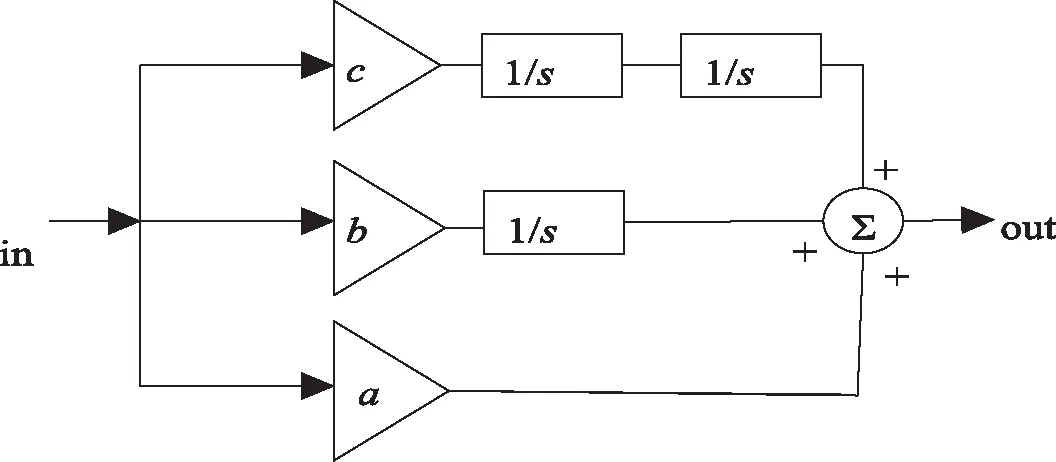
图1 三阶PI框图
由图1可知,三阶PI系统闭环传递函数:
(10)
误差传递函数为:
(11)
单位阶跃信号输入时的稳态误差为:
(12)
相较于传统PI自适应律(Ⅰ型系统),本文设计的Ⅲ型系统有更好的动静态性能。针对三阶PI系统闭环传递函数H0(s),参数a过小会降低系统的收敛速度,a变大会减少系统的上升时间,提高系统的动态性能。但a过大则会使系统超调过大;参数b过小则会使系统不稳定,b增大会减少系统的上升时间,加快系统的收敛速度;当参数c过大时,会降低系统的收敛速度。
3 仿真验证
3.1 仿真模型的搭建
为验证本文设计的基于三阶PI的MRAS观测器的性能效果,在MATLAB/Simulink环境下进行仿真研究,控制对象选取SPMSM,并且采用id=0控制。在仿真研究中,将与传统MRAS进行比较。
选用的SPMSM参数:极对数Pn=4;定子电感Ls=8.5 mH;定子电阻R=2.875 Ω;磁链ψf=0.171 Wb;转动惯量J=4.8×10-6kg·m2;阻尼系数B=0。基于三阶PI的MRAS观测器的实现框图如图2所示。

图2 基于三阶PI的MRAS观测器的实现框图
3.2 仿真结果分析
恒载变速分析:在t=0.2 s时,Nref由400 r/min骤变为700 r/min,带2 N·m恒负载。仿真时间为0.3 s。传统MRAS和基于三阶PI的MRAS的iq响应曲线如图3所示,转速响应如图4所示。

(a)基于三阶PI的MRAS的iq响应 (b)传统MRAS的iq响应图3 两种滑模观测器的iq响应

(a)基于三阶PI的MRAS的转速响应 (b)传统MRAS的转速响应图4 两种滑模观测器的转速响应
由图3可以看出,电机启动运行时,传统MRAS的iq超调至18 A,在0.2 s电机变速之前,电流iq处于骤减状态,不能趋于稳定。而基于三阶PI的MRAS观测器经过极短时间使电流iq达到稳定状态。在0.2 s时,电机转速由600 r/min骤变为400 r/min,再次骤变为700 r/min。由图4可知,负载恒定转速发生骤变,图4(a)收敛速度更快,抖振更小,具有较高的鲁棒性。
恒负载变参数分析:初始转速Nref=600 r/min,带3 N·m恒负载。在t=0.2 s时,电机参数由R骤变为2R。仿真时间为0.3 s。传统MRAS和基于三阶PI的MRAS的转速误差响应如图5所示。Te响应曲线如图6所示。

(a)基于三阶PI的MRAS的转速误差 (b)传统MRAS的转速误差图5 转速误差响应
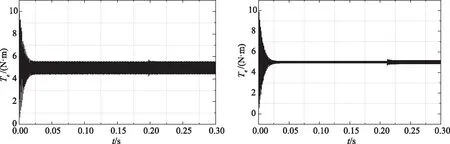
(a)基于三阶PI的MRAS的Te响应 (b)传统MRAS的Te响应图6 Te响应对比图
电机带负载启动时,经过极短时间完成收敛至设定值,而传统MRAS始终处于波动状态。与传统MRAS相比较,基于三阶PI的MRAS的Te收敛速度提高50%。在t=0.2 s时,电机参数由R骤变为2R,图5(a)的暂态时间比传统MRAS缩短了40%,而图5(b)转速误差抖动大,收敛速度慢;图6(a)Te响应时间可以忽略不计,参数R的变化对基于三阶PI的MRAS的控制系统影响极小。图6(b)中Te响应速度慢,控制系统对参数变化敏感。
仿真结果表明,负载恒定参数突变时,本文设计的观测器不仅能够有效抑制系统抖动,而且还具有良好的鲁棒性和动静态性能。
4 结 语
针对PMSM无传感器控制在运行过程中因负载、转速和参数变化而引起的动态跟踪误差大和鲁棒性差的问题,提出一种基于三阶PI的MRAS观测器,在传统MRAS中引入三阶PI,可以有效消除突发扰动时的跟踪误差,抑制滑模抖振,使系统具有良好的稳定性和鲁棒性。对传统MRAS与所设计的观测器进行仿真实验对比,本文提出的观测器抑制外部扰动能力强、对电机内部参数变化不敏感、跟踪精度高以及抖动弱化明显。
