基于SLIC超像素分割和ICP配准的牵引变压器套管红外三维立体重构方法
2022-02-02林文萱郭思雨辛建波
曾 晗,林文萱,郭思雨,辛建波
(1.华东交通大学 电气与自动化工程学院,江西 南昌 330013;2.国网江西省电力有限公司 电力科学研究院, 江西 南昌 330096;3.中国铁路武汉局集团有限公司 信阳供电段,河南 信阳 464100)
随着近年来我国高速铁路的迅猛发展,铁道电气化水平得到了不断的强化,牵引供电系统的设备数量也在逐年增加。牵引变压器作为牵引供电系统的重要组成部分,其运行的安全可靠性一直广受关注[1-3]。从2015年至2020年间,由于铁路线路的扩增,武汉铁路局集团有限公司信阳供电段管内的牵引变压器年平均增加约8%,按此递增速度,到2030年,牵引变压器数量将会是现有变压器数量的两倍,这会导致运维人员的工作难度和工作量显著增加。依据国铁集团下发的《关于进一步深化高速铁路综合维修生产一体化站段改革的指导意见》(以下简称“《指导意见》”),如何提升铁路运维检修的自动化和友好性是目前急需解决的问题。
牵引变压器作为电力变压器的一种,其状态检测主要采用红外热成像技术[4-5]。对变压器等级在110 kV以上的缺陷统计分析可以发现,发热缺陷占总缺陷的80%以上[6]。在不需停电的状态下,当变压器因局部放电、产生泄漏电流以及水分子介质损耗产生了小范围的局部发热现象时,利用红外热像仪对其进行探测以便检测出变压器的内部故障是电力设备运维检修中较为常用的一种方法[7-10]。但在对设备红外图像的处理中目前往往采用人工识别归类的方式,对人员的实践经验要求较高,且处理中容易出现遗漏的现象,需要进行二次复核,难以达到《指导意见》中提高自动化减少工作量的要求。为降低运维人员工作量及工作难度,提升检测精度,文献[11]提出了使用深度学习的方法对红外目标进行自动探测。文献[12]通过特征提取和分类完成了基于红外图像的电力设备自主故障诊断过程。但红外图像具有信噪比低和纹理细节模糊的缺点,虽然文献[13-14]分别提出了基于降噪和与可见光融合的解决方法,但其仅可展示二维数据,无景物深度信息的特质也导致无法反映具体的设备故障位置,这为快速准确地进行实时故障定位带来了困难。
为克服二维图像的局限性,弥补位置信息的不足,国内外各领域研究人员在提取了3D数据点并对数据进行简化分析后,提出通过三维可视化展示数据[15],这些三维数据可以被运用在各类数字孪生模型构造中。文献[16]将利用点云数据进行三维建模的技术应用在测绘中。三维建模技术也被大量地运用在医学中[17]。随着激光扫描成像技术和计算机视觉技术的不断发展,如今已有学者将三维激光技术应用于铁路之中。为了达成铁路扣件的状态检测需求,文献[18]提出一种利用三维数据自动检测扣件缺陷的方法。文献[19]建立了牵引变压器的三维有限元模型。文献[20]提出了基于三维图像技术的无砟轨道表面裂缝自动识别技术。通过三维数据展示出的设备信息相较于二维图像而言更具有可观性,在提供了更强分析能力的同时,也可以协助运维人员对设备状态做出更加精确的判断。但上述三维重构方法仅限于可见光监测,无法有效反映电力设备内在的缺陷,不能满足其运维检修的基本要求。
为解决传统红外图像缺乏位置信息、三维模型缺乏热力信息的问题,文献[21]结合热成像技术和激光雷达扫描技术将红外图像与点云模型运用在深空空间探测领域,但对于电力设备尺度下的红外图像三维可视化研究并不常见。
本文以牵引变压器为例,在考虑到其故障产生机理的基础上,基于SLIC算法对牵引变压器套管红外图像进行超像素分割以便提取其温度数据,使用激光雷达扫描技术获取套管的点云数据,经ICP配准及处理后构建其三维模型。再将红外测温数据与三维立体模型结合以便使故障检测和诊断过程更加直观。以武汉铁路局集团有限公司信阳供电段110 kV变压器套管实测图片和数据为算例进行测试。结果表明,本文提出的超像素分割算法和点云数据处理方法可有效提高分割效果与点云模型构建效果,且红外测温数据三维重构作为牵引变压器套管状态评估手段的一种方法行之有效。
1 三维立体重构方法设计
随着铁路系统发展的逐步壮大,牵引供电系统中包含的变压器、避雷器、电流互感器和电压互感器等一系列用电设备数量都在逐渐增加。表1为武汉铁路局集团有限公司某供电段管辖内某一条铁路沿线的用电设备种类及数量。在如此庞大的数据下,运维人员检修的难度逐年攀升。为解决该问题,减少重复工作量、提高天窗检修效率和精准度尤为重要。
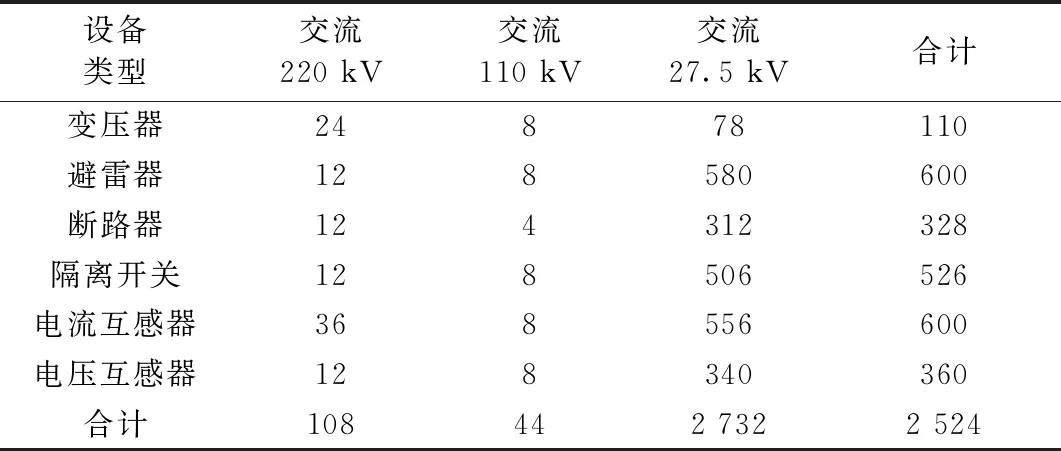
表1 某供电段管辖内设备数量 台
在设备运行过程中,牵引变压器套管受装配工艺、运行工况以及运维检修水平的制约,往往是容易出现缺陷的部位。综合过往运维检修的数据可以发现,绝缘套管因接触不良过热而导致的故障屡见不鲜[22]。
由于水油比热容的差异,当变压器套管中油量减少而散热不均,套管内外形成温度差异时,红外热成像可以直观准确地将其工作状态反映出来。因此考虑到工程中对于变压器套管的检修需要,同时为了降低运维人员的工作难度,提出基于红外影像的牵引变压器套管三维立体重构方法,其技术原理如图1所示。

图1 红外三维模型重构原理
此方法主要分为超像素分割、搭建三维纹理模型和红外三维模型重构三部分。为了在设备外表面模型上引入可展示内部温度信息的红外图像,使用超像素分割算法提取红外图片中的牵引变压器套管,扫描采集变压器套管的点云数据并处理,最后将红外图像投影至展开坐标的套管三维模型上。因考虑了设备温度和位置信息,此方法适用于与周围自然环境存在温差,且背景复杂的大型发热用电设备故障检修与维护。
2 基于超像素分割的目标设备红外图像提取
为有利于红外图像和三维模型融合过程,对套管的红外热成像进行目标分割。使用红外测温仪拍摄牵引变压器套管,获取套管的红外图像。
使用简单线性迭代聚类(Simple Linear Iterative Clustering,SLIC)[23]超像素分割算法,考虑变电所环境复杂器械较多,采用六角网格对红外图像进行超像素分割。六角网格的标准间距为
( 1 )
式中:S为六角网格的标准间距;R和C分别为牵引变压器红外图片的行和列;k为超像素的个数。
定义初始聚类中心,形成矩阵Ci为
Ci=[liaibixiyii]T
( 2 )
式中:li为Lab色彩空间的亮度;ai和bi为颜色对立维度;xi和yi分别为聚类中心的行和列;i为超像素的标签。
以聚类中心点为中心,搜索附近两倍步长范围内的所有像素点进行聚类。根据像素和聚类中心的颜色以及空间距离,更新像素点的标签和信息,计算每个像素点和聚类中心的距离分别为
( 3 )
式中:dC、dS分别为颜色、空间距离;m为加权因子;lj、aj、bj分别为Lab空间的亮度、空间坐标。对超像素的边界进行划分,得到超像素分割后的红外图像。
根据变压器设备的红外图像特征和现场检测要求[24],为提高设备红外信息的准确性,应在光照较弱无阳光直射的时候进行拍摄。同时在保证红外图像的背景对目标设备产生的噪声相对较小的前提下,应尽量将目标设备置于相机的中间部位。为此制定目标和背景标记规则,将图像中央亮度最低的超像素块和图像边缘亮度较大的超像素块标记为背景,将图像中位于非边缘区域亮度最高的超像素块标记为目标。
为解决因目标区域中包含多连通区而存在目标设备欠分割的问题,引入Otsu阈值作为预处理,预选背景区域。依据合并算法(Maximal Similarity based Region Merging,MSRM)把背景标记区域与相邻超像素块合并,再对未标记超像素块进行合并,最后用形态学运算得到更光滑的图像边界,算法流程如图2所示。

图2 套管红外图像分割算法
在SLIC超像素分割的同时用Otsu阈值做背景预选,根据设定规则标记目标和背景超像素块,基于MSRM算法融合超像素块,再用形态学运算处理图像。
将Jaccard和Dice系数[25]作为提出算法和其他超像素分割算法的精度对比评估方案,KJ测量了两组(θ1和θ2)的相交面积之比除以它们的并集面积
( 4 )
式中:θ1为样本分割的结果;θ2为算法分割的结果。
Dice系数KD计算相交区域的比率除以每个单独区域的平均和
( 5 )
3 点云数据获取与三维模型重构
为构建牵引变压器套管的三维立体模型,需获取其点云数据并进行数据处理,具体步骤如下:
Step1获取牵引变压器套管点云数据
目前获取点云数据的方法主要分为主动获取和被动获取两种,无人机作为常用的被动获取方法具有低成本的优势,但变电所的环境过于复杂,从安全和效率方面考虑,本文选择采用激光雷达扫描(Light Detection and Ranging, LiDAR)的主动方式采集套管表面的三维密集点云。
Step2点云数据处理
因相邻变电设备点云采集帧中存在数据重叠,故需要对点云数据进行配准和拼接。选择迭代最近点方法(Iterative Closest Point, ICP)[26]进行点云精配准,基于欧氏距离残差的ICP最优目标模型f(R,T)为
( 6 )
式中:qi、pi为匹配点对;R、T为旋转和平移矩阵。
为解决ICP算法模型对初始位置要求过高的问题,在精配准前采用SAC-IA算法对点云数据粗配准,将粗配准得到的值作为ICP算法的迭代初值以提升点云配准精度。
因变电所环境较为复杂,点云数据采集过程中常因微波折射产生噪声,故在计算高斯曲率和平均曲率后使用双边滤波算法[27]对点云模型进行降噪处理,双边滤波式为
p′=p+αn
( 7 )
式中:n为数据点p的法向量;p′、α分别代表滤波完成后的数据点、双边滤波因子,α的表达式为
( 8 )
式中:x为数据点间距,x=p-pi;m为数据点p的M最近邻域Nm(Pi)中的数据点个数;θp和θc分别为数据点p的M最近邻域Nm(Pi)法向高度和内切平面的高斯滤波。
旋转误差ER和平移误差Et计算式分别为
( 9 )
(10)
式中:Ri和ti为定义的固定参考旋转矩阵和平移矩阵;Rj和tj为算法生成的牵引变压器套管旋转和平移矩阵。
Step3点云数据处理后获得目标设备点云模型,利用Delaunay细分算法[28]进行三角网格重建。常用的三角面质量评估系数Q为
(11)
式中:dn和dmax分别为三角形第n边和最长边长。
Step4将牵引变压器套管红外二维图像正交投影至展开三维坐标的套管模型上,获取可有效展示红外特征的牵引变压器套管三维模型。
红外三维立体模型重构具体操作流程如图3所示。

图3 三维模型重构
选择合适的采样交叠率以激光雷达扫描的方式获取牵引变压器套管点云数据,经粗配准和精配准后对数据滤波,重构三角曲面完成套管三维立体重建,再将第二章中提取的套管红外图像投影至套管三维坐标上得到变压器套管红外-三维立体模型。
4 算例测试及分析
4.1 分割红外图像
使用热像仪FLIR T800拍摄红外图片,以武汉铁路局集团有限公司110 kV牵引变压器套管为算例,按照图2流程对牵引变压器套管进行超像素分割,套管原始图像和分割后图像如图4所示。
由图4(b)可知,超像素块与设备边缘轮廓贴合度较高,表明利用SLIC算法可有效分割牵引变压器套管红外图像。在此基础上利用Otsu阈值预选背景超像素块,按照标记规则标定目标和背景超像素块,用MSRM算法进行超像素合并,最后基于数学形态学开闭运算,消除与套管相连的高度干扰变压器背景,得到分割完成的变压器套管。为了利于套管分割后的红外图像与三维模型进行有效融合,将分割后套管的黑色背景删除,生成无背景变压器套管红外图像如图4(c)所示。通过目标提取删除复杂背景,简化了红外三维重构难度的同时也排除了背景温度噪声干扰。
4.2 分割性能对比测试
选择20幅牵引变电红外图像,测试区域增长算法(Regional Growth)、熵率算法(Entropy Rate)、随机游走算法(Random Walks)、线性谱聚类算法(Linear Spectral Clustering, LSC)、SLIC+MSRM算法和设计标记规则的SLIC+MSRM+Otsu算法分割性能,根据式( 4 )、式( 5 )分别计算每种方法的Jaccard与Dice系数,测试结果如图5所示。

图5 不同算法精度计算结果对比
由图5可知,因SLIC算法将图像亮度作为算法的参数之一,其分割红外图像的Dice、Jaccard均值比LSC算法分别增加了7.45%、7.96%。在牵引变电较为复杂的环境背景下,使用区域增长算法,熵率算法和随机游走算法分割编号6图片时,得到Dice系数分别为0.75、0.7、0.71,而设计了背景标记规则基于SLIC的分割算法精度值为0.958,此分割精度差别也出现在编号14、18等图片中,可知本文提出的算法能保持更好的稳定性。
4.3 点云数据获取
为预防采集牵引变压器套管点云数据时出现数据缺失的现象,用二维交叠式扫描方法获取点云数据。设置采样范围交叠率ROA分别为0%、25%、50%,采样结果如图6所示。

图6 套管点云数据采样
当采样交叠率ROA=0时,牵引变压器套管的多处点云数据缺失严重,噪声干扰也相对较大,当ROA=25%时,交叠区域弥补了部分缺失数据但仍存在漏洞,而当交叠率ROA=50%时可以得到较完整的牵引变压器套管点云模型如6(c)所示。图6(d)展示了完整的测试结果,当交叠率为40%已实现牵引变压器套管点云数据的完整采集,但按照拟合曲线判定其存在一定偶然性,故本文选择50%的交叠率获取变压器套管点云数据。
4.4 点云数据配准
以交叠率ROA=50%扫描变压器套管,获得如图7(a)所示套管点云数据。使用SAC-IA算法完成点云数据粗配准,如图7(b)所示。将粗配准得到的数据作为原始数据输入ICP算法进行精配准得到图7(c),再使用双边滤波算法滤除变压器套管点云数据周围存在的噪声,获得最终点云模型如图7(d)所示。

图7 配准滤波后套管点云模型
与相关熵ICP算法(Correntropy Iterative Closet Point, CICP)、修剪ICP算法(Trimmed Iterative Closet Point, TrICP)和传统ICP算法进行对比。实验中的配准误差采用均方根误差(Root-mean-square Error, RMSE)计算,根据式( 9 )、式(10)计算旋转误差和平移误差,计算结果如图8和表2所示。

图8 算法对比
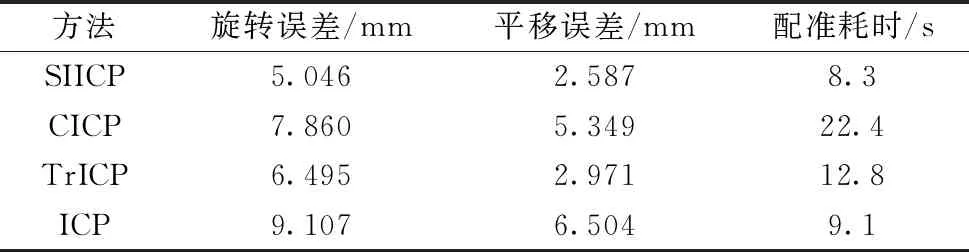
表2 拼接误差对比
设定ICP迭代算法的目标配准误差为5 mm,由图8可得,SIICP算法经4次迭代后配准误差达到4.842 2 mm,CICP、ICP算法配准误差为4.952 1、4.784 9 mm,分别需要经过6次和7次迭代,而TrICP算法9次迭代后目标误差可达4.837 2 mm。由表2可得,SIICP算法旋转精度比CICP算法增加了约27%,平移精度增加了约31%,配准耗时比传统ICP算法减少了约20.3%。
4.5 红外三维模型重建
在取得完备点云数据后,分别用泊松算法和Delaunay细分算法对曲面进行重建。使用不同算法对武汉铁路局信阳供电段牵引变压器套管点云数据进行三角面重建,当获得的三角网格更趋近于等边三角形时,则质量更优,根据式(11)评估三角面的质量,获得的重建三角面质量比例如图9所示。

图9 网格质量分布
由图9可知,经泊松算法获得的网格质量大部分分布在区间[0.4,0.8],而由Delaunay细分算法获得的曲面三角网格质量绝大部分分布在区间[0.8,1.0],优于泊松算法。因此使用Delaunay算法进行网格细分,获得图10所示的牵引变压器套管三角网格模型和三维纹理模型。

图10 变压器套管三维纹理模型
为减少因无法展示温度信息导致设备故障检测量过大的弊端,将红外图像与变压器套管的三维纹理图进行结合。展开经点云数据处理后获取的变压器套管模型三维坐标,将红外二维图像正交投影至展开的三维坐标上,得到可有效展示红外特征的牵引变压器套管红外三维模型如图11所示。

图11 变压器套管三维红外模型
此三维模型在保留了套管纹理的基础上很好地展示了套管的红外温度特征。红外-三维模型重构可有效解决目前三维可视化技术缺乏热力信息、红外图像缺乏位置信息的问题,适用于大型变电设备的运维检修。在运营维护中,当运维人员需要知晓设备以及设备周围区域红外热像情况时,其可帮助运维人员及时掌握设备的热力状态,提高工作效率。三维红外模型的可观性要远高于二维红外图像,根据此三维模型可有效分析牵引变电所输变电设备热源分布状态和趋势,并为热像量化数值的详尽分析提供一种高效的手段。这也有助于运维人员依据三维模型来对红外热像测温数据进行更加详尽地监测,在增加了故障诊断直观性的基础上可减轻运维人员的工作量。
4.6 算法效率
本文实验环境为Inter(R) Core(TM) i5-8265U处理器,8 GB内存。对比本文改进的SIICP算法与原始ICP及CIICP和TrICP算法,计算其完成套管点云配准所需的时间,结果见表3。

表3 点云数据配准算法时间损耗 s
由表3可知,4种对比方法中,SIICP方法完成点云模型重构方法耗时最少,约为10 s,TrICP方法耗时最多,需要约28 s。由于本文方法在粗配准阶段引入SAC-IA算法,不需要进行大量的重复迭代计算寻找帧间点云的重叠部分即可完成点云位姿矫正,在精配准阶段,使用ICP算法,有效提高了点云配准效率。
经过完整计算,在此实验条件下,从目标设备提取到红外三维模型重构的总计时间损耗约在16~28 s之间,这对于电气设备的运行状态监测是可以接受的。
5 结论
本文采用三维激光扫描技术,基于红外图像对牵引变电所的变压器套管开展三维可视化研究,主要结论如下:
(1)提出一种基于SLIC和MSRM的变电设备红外图片超像素分割算法,设计目标和背景标记规则,引入Otsu阈值作为背景超像素块的预选条件,并加入数学形态学运算。通过多种算法分割多幅红外图片,证实该分割算法可更快速准确地提取目标设备,与其他算法相比其超像素分割精度最高可增加41%。
(2)以武汉铁路局信阳供电段的变压器套管为算例,采集并处理变压器套管点云数据。结果表明,采样交叠率为50%时可更加高效完整地提取点云数据。在精配准算法ICP前引入SAC-IA算法,迭代次数得以优化的同时相较于ICP算法拼接精度增加了约70%。
(3)提出一种红外-三维立体重构方法,将红外图像与三维模型结合。通过对信阳供电段110 kV变压器套管进行红外三维重建测试,验证了此方法可以有效地展示出电气设备的三维红外模型。