Two-stage eco-driving control strategy for heterogeneous connected and automated vehicle platoons
2022-02-01YANGJinsongZHAODezongJIANGJingjingLANJianglinLILiang
YANG Jinsong ,ZHAO Dezong ,* ,JIANG Jingjing ,LAN Jianglin ,LI Liang
(1.School of Engineering,University of Glasgow,Glasgow G12 8QQ,UK;2.Department of Aeronautical and Automotive Engineering,Loughborough University,Loughborough LE11 3TU,UK;3.State Key Laboratory of Automotive Safety and Energy,Tsinghua University,Beijing 100084,China)
Abstract: A two-stage eco-driving control strategy was proposed for the heterogeneous platoon consisting of different Connected and Automated Vehicles (CAVs) to improve the fuel efficiency of the platoons.The speed optimisation based on dynamic programming (DP) created an energy-efficient reference speed profile for the CAV platoon at the offline planning control strategy.A Bi-Directional Leader Following (BDLF) strategy was employed at real-time control strategy,to maintain the platoon string stability and to track the reference speed profile in real-time.The proposed two-stage eco-platoon control strategy was established in MATLAB.Its performances were validated by the Autonomie Vehicle System Simulation tool based on the traffic data provided by the California Department of Transportation (Caltrans) (USA) Performance Measurement System(PeMS).The results show that the proposed two-stage eco-driving strategy improves the fuel efficiency of the CAV platoon by 10.1% compared to benchmark strategies.Therefore,this method can maintain the string stability and provide a more energy-efficient solution for the heterogeneous CAV platoons.
Key words: connected and automated vehicles (CAV);eco-driving;vehicle platoons;driving control strategy;speed optimisation
The fast development of transportation systems has led to a significant increase in energy use and air pollutant emissions.Transportation systems have consumed more than 60% of the fossil energy globally[1].In China,the CO2emissions from the combustion of fossil energy reached 9.42 billion tons,in 2018.Meanwhile,fossil energy of China heavily depends on imports.As a participant of the Paris Agreement,China has committed to meet certain carbon emission forecasts around 2030 and achieve carbon neutrality by 2060[2].Therefore,improving energy efficiency in transportation syst ems has become essential.
It is generally recognised that an eco-driving strategy can substantially improve vehicle efficiency[3]. A study indicated that eco-driving strategies can improve vehicle fuel economy by 5%~15%[4].Eco-driving strategies can assist vehicle to operate in energy efficient conditions by running under optimised speed profiles.Most eco-driving strategies have been developed for Connected and Automated Vehicles (CAVs).CAVs are based on Vehicle-To-Vehicle (V2V) communications,Vehicle-To-Infrastructure (V2I) communications and Intelligent Transportation Systems (ITS)[5-6].They can access more traffic information than conventional vehicles.Therefore,CAVs can acquire traffic flow rates,traffic densities,and average speeds of future routes.
In addition,CAV technologies also enable platooning capabilities for vehicles[7].Vehicle platooning technology organises capable vehicles on the same route into a platoon.
The benefits include the improvements of traffic stability,safety and energy efficiency[8].Ecological Cooperative Adaptive Cruise Control (eco-CACC) is a typical eco-platoon strategy for CAVs.Eco-CACC optimises the energy consumption of the vehicles and maintains inter-vehicle distances.An eco-CACC of heterogeneous platoon optimised the vehicle platoon energy consumption by eliminating aggressive driving operations[9].However,only the energy consumption of the leading vehicle was considered in optimisation,while the rest of the vehicles just follow the preceding vehicle.
This paper aims to develop a two-stage eco-driving strategy for CAV platoons.The investigated platoon is heterogeneous,indicating the vehicles in the platoon have different dynamics,powertrain,etc.The global optimisation strategy optimises the total energy consumption of the platoon in offline planning.
The optimisation relies on vehicles characteristics and road conditions.Afterwards,in the online controller,the CAV platoon tracks the reference speed and maintains the platoon string stability.The two-stage eco-platoon can balance platoon energy consumption and the influence on other vehicles.Therefore,the strategy would be easier to implement in practical transportation systems.The platoon reference speed created in offline planning reduces the computational pressure for real-time control.The characteristics of each vehicle are considered in offline planning,so this method can be used for the heterogeneous platoon of CAVs.A leading vehicle decision is implemented in the online controller to determine the reference speed or to follow the vehicle ahead of the platoon.The leading vehicle decisions improve the stability of the controller when the tracking target changes.Based on the realistic numerical simulations,the proposed two-stage ecoplatoon strategy significantly improves the platoon energy efficiency.
1 Overall Control Architecture of Eco-Driving
The eco-driving technology is a method that uses traffic information to optimise the planning and control of vehicles to improve vehicle energy efficiency.Eco-driving can be generally divided into three layers as shown in Fig.1[10]. This study focuses on global eco-driving and real-time eco-driving.

Fig.1 Hierarchical control architecture for eco-driving of CAVs [10]
· Eco-routing is to find the route that consumes the minimum energy consumption and satisfies the desired time for controlled vehicles based on the route data[11].The route data include real-time traffic information,historical traffic data and road maps.
· Global eco-driving creates CAVs speed profile for the subsection of the route based on vehicle characteristics,road condition and traffic data (e.g.,signal phase and timing (SPaT),road gradients and traffic flow)[12-13].The optimised speed profile achieves optimal energy efficiency.However,the offline planning methods are based on the complete future route information.As a result,these methods are poor against disturbances because the real-time traffic information is excluded in these methods.
· Real-time eco-driving is optimising the CAV energy efficiency by considering uncertainties from other traffic participants.Real-time optimisations maintain safe intervehicle distances and minimise energy consumption by adapting the vehicle speed in real-time[14-15].Compared to conventional adaptive cruise control,real-time optimisation allows the CAV to run at an optimised speed by enabling more flexible inter-vehicle spacing.The eco-driving strategies for vehicle manoeuvre planning are contained in this layer.However,the preview information of other traffic predictions provided by V2V[16]or learning-based predictive models[15]is limited to a short horizon.Meanwhile,some traffic data of future routes cannot be used in real-time eco-driving.Hence,real-time optimisation methods may be suboptimal.
Eco-driving strategies using a two-stage hierarchical control are proposed in this study,specifically to address the gap between the global eco-driving with real-time eco-driving.
2 Description of the Two-Stage Eco-Driving Platoon
All vehicles in the platoon are powered by the Internal Combustion Engine (ICE),in this paper.Detail of the twostage eco-platoon strategy is proposed in the following.
2.1 Architecture of the Strategy
In this subsection,the development of the two-stage ecoplatoon is described.The configuration of the two-stage ecoplatoon is shown in Fig.2.

Fig.2 The architecture of the two-stage eco-platoon
Before the trip starts,the offline planning can produce a fuel-efficient reference speed for the controlled platoon.Data fusion and speed optimisation take place in this stage.First,the offline planning will receive the route map,route plan and traffic state information using the V2I and the ITS.The data fusion merges the information to provide the average traffic speed.In speed optimisation,the reference speed for the platoon is generated based on vehicles characteristics and the average traffic speed.Dynamic programming (DP)with multi-objectives is used for speed optimisation.The proposed control objectives include fuel consumption and speed deviation.Speed deviation is the difference between the speed of the controlled vehicle and the average speed of the current road segment.This design can improve the energy efficiency while keeping the reference speed close to the traffic flow speed on the freeway.Therefore,the generated reference speed is easier to be tracked in realtime control.The distance-based model is chosen in offline planning because of two reasons.First,any adaptation of the platoon speed only influences the nearby locations in a distance-based driving cycle.Meanwhile,the reference speed is not affected elsewhere[17].Second,the distancebased model ensures that the DP follows time-dependent constraints[18].
An online controller is designed to track the reference speed according to the traffic situation.The leading vehicle decision is used to track the reference speed or follow the preceding vehicle based on real-time traffic information.The preceding vehicle is the traffic participant in front of the first vehicle in the platoon.Perception sensors and V2V communications provide real-time traffic information including the states of other traffic participants.Then,a local adaptation based on the platoon control method is proposed for vehicles in the platoon to track the reference speed.Meanwhile,local adaptation maintains a safety inter-vehicle distance and platoon string stability.
2.2 Vehicle Dynamics
In this paper,two different vehicle dynamic models are used in offline planning and online controller,respectively.As described in section 2.1,the distance-based model is employed in offline planning.However,the impact of other traffic participants must be considered in the online controller.Hence,the point-mass model is used to design the online controller,because the point-mass model ensures that the real time control follows distance-dependent constraints.In offline planning,each vehicle in the same platoon drives at the same speed,so that the whole CAV platoon has the same speed profile.In the distance-based model[19-20],the distance step is assumed to be constant and represented by Δs.The discrete distance-based vehicle dynamics can be obtained by:
wherek∈{0,1,…,N-1}.vA,aAandtAare the platoon speed,platoon acceleration and travel time in the distance-based model,respectively.The acceleration for ICE vehicles is generated by engine torque,which can be calculated by:
where the rolling resistance coefficientCrris assumed to be the same for all tyres;rgbis the ratio of each gear including the final drive ratio;TωandTbrkare the output torque of the engine and braking torque,respectively;mis the vehicle mass;rωis the vehicle wheel radius;gis the gravity;ρis the air density;Ais the vehicle front cross-section andCdis the air drag coefficient.This paper focuses on optimising vehicle powertrain energy output based on control methods.Hence,this paper ignores the impact of the change in air drag on CAVs caused by the changing inter-distance between vehicles.The point-mass model is used by the online controller since the model can be applied to any vehicle in either homogeneous or heterogeneous platoon.The point-mass model is described as:
wherei∈{0,1,…,n}.vi,aiandtiare speed,acceleration and travel time oftthvehicle in the platoon,respectively.
2.3 Engine Fuel Consumption Model
Energy consumption optimisation minimises the engine fuel mass flow rate based on the engine fuel efficiency map.
The engine fuel mass flow rate can be described as:

where the crankshaft rotational speedωecan be described as:

whereωwheelis the wheel rotational speed.The fuel efficiency map in this paper is obtained from the software Autonomie[21].
3 Offline Planning Design
Offline planning aggregates the traffic data and generates a reference speed to minimise fuel consumption under the most feasible speed range.
3.1 Data Fusion
The CAVs in a platoon can receive traffic state information for future road segments from the ITS.In this paper,the average speed for the road segments is gained through the Caltrans Performance Measurement System (PeMS).The primary data source for the PeMS is the vehicle detector stations (VDS),which can provide the traffic density,flow and average speed of each traffic segments.The PeMS can receive traffic updates every 30 seconds and aggregate the information.
3.2 Speed Optimisation
This work aims to propose an eco-driving method for heterogeneous platoon of CAVs.Speed optimisation generates the reference speed for a CAV platoon based on a DP with multiple constraints. Meanwhile,the CAV platoon has the same reference speed and acceleration for all vehicles in the platoon.Thus,the distance-based model Eq.(1) is used in the DP to describe the platoon dynamics.Each CAV can calculate engine fuel mass flow rate by Eq.(4).The cost function is chosen as:

where the first term of the cost function represents the total fuel consumption for the platoon based on each CAV powertrain characteristic,and the second term represents the deviation of the platoon speed and the average speed of the current road segment.f,iis the engine fuel mass flow rate of vehicleiandis the average speed of the road segment .Additionally,ωo,1andωo,2indicate the weights of the fuel consumption and speed deviation,respectively.The physical constraints of the CAVs are written as:
where constraints are applied to engine torque,vehicle acceleration and vehicle speed.represent the minimum and maximum allowable engine torque output of vehiclei,respectively.aminandamaxrepresent the maximum deceleration and acceleration of the vehicle platoon,respectively,which are determined based on the vehicle with the weakest relevant ability in the platoon.vmaxis set as the road upper speed limit of the road andvminis the lower-bound speed for t he vehicle.To ease understanding,the pseudo-code for the offline planning is presented in Algorithm 1.
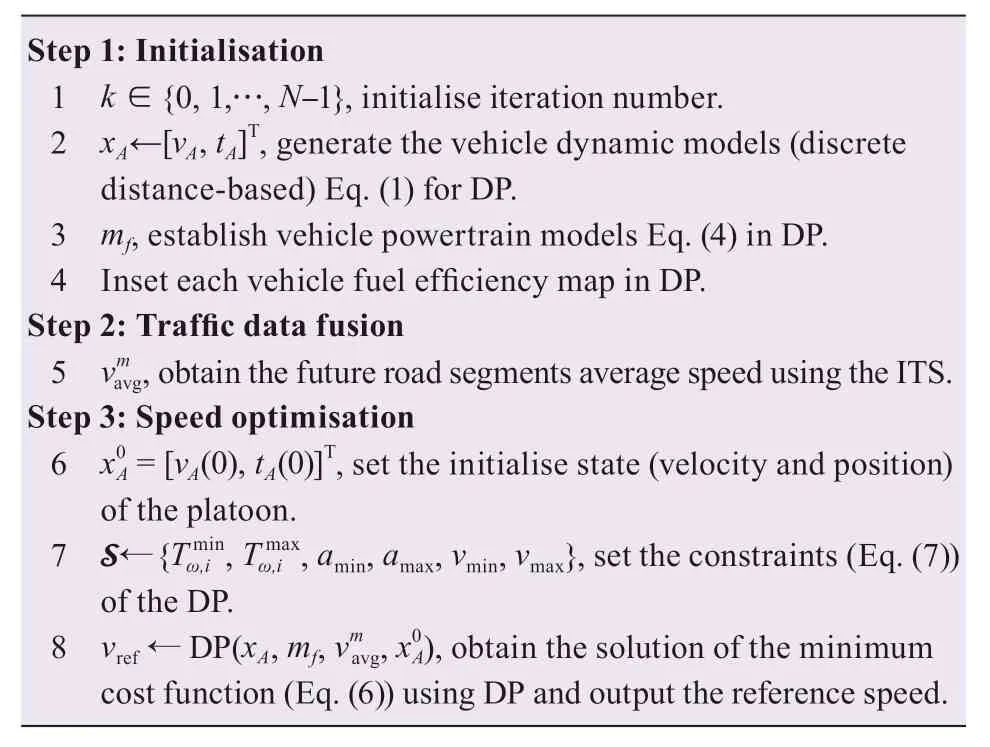
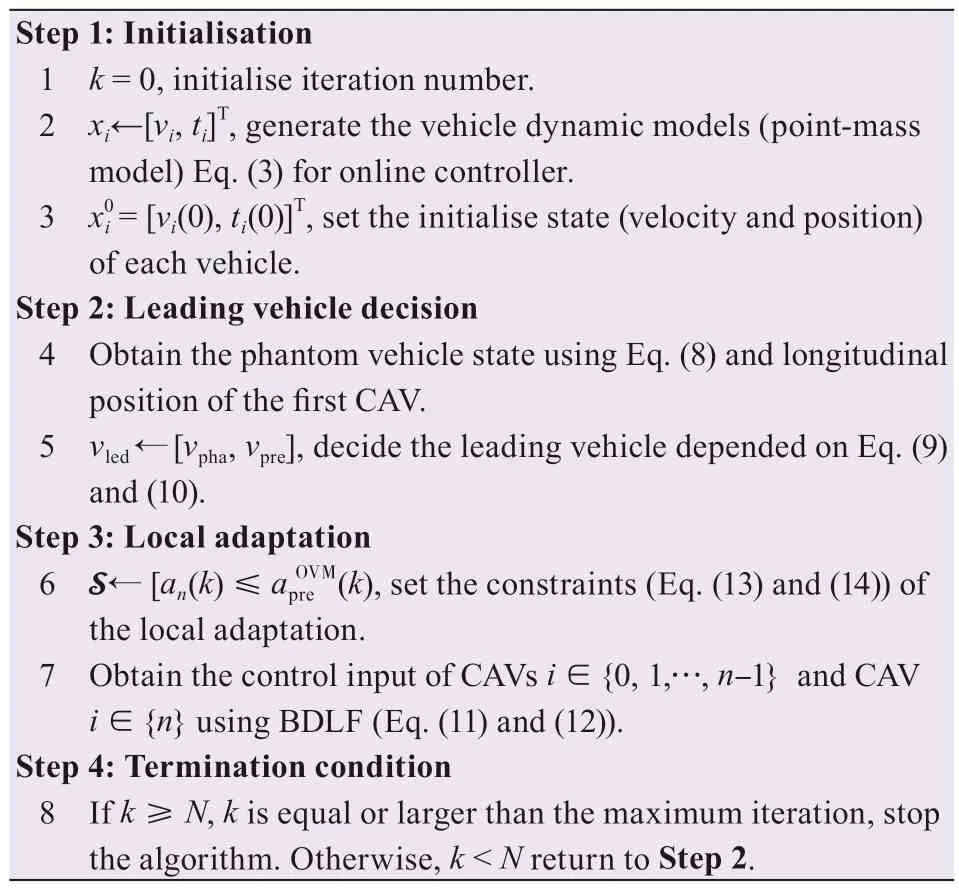
Algorithm 1 Offline Planning Algorithm
4 Online Controller Design
The online controller regulates the CAV platoon in real-time and adapts the speed for other participants.
4.1 Leading Vehicle Decision
The leading vehicle decision is used to decides whether to follow the phantom vehicle or the preceding vehicle.The phantom vehicle is a virtual vehicle in front of the first CAV in the platoon.It’s designed to be a leading vehicle to track the reference speed when there is no preceding vehicle in the desired safety range.The speed reference provided by offline planning is a distance-based speed profile.Hence,the platoon needs to track the reference speed using the relative position.There is a desired constant distance between the phantom vehicle and the first vehicle,which can be described as:

where is the position of the phantom vehicle.The speed of the phantom vehicle depends on the longitudinal position and relative speed of the first CAV.
The leading vehicle decisions depend on the following two conditions:
· The distance between the preceding vehicle and first vehicle is smaller than the desired distance :

where is the position of preceding vehicle.
· The speed of the preceding vehicle is smaller than the phantom vehicle at the current time step:

where and are the speed of phantom vehicle and preceding vehicle,respectively.The leading vehicle makes decision in real-time based on the above conditions.Meanwhile,the CAV platoon will follow the preceding vehicle only if all the above conditions are satisfied.
4.2 Local Adaptation
Local adaptation involves controlling each CAV in platoon,tracking the speed reference,maintaining the desired intervehicle distances,and providing platoon string stability.
The point-mass model (3) is used to represent the CAV’s dynamics in the platoon.In addition,a Bi-Directional Leader Following (BDLF) control is applied in local adaptation.The BDLF is a platoon control method improvement of the carfollowing control model[22-23].The topology and architecture of the BDLF models are shown in Fig.3a.Each CAV in the platoon considers the position and speed of the front vehicle and following vehicle.Meanwhile,all vehicles in the platoon consider the leading vehicle’s speed received by the first vehicle,as shown in Fig.3a.The control input of CAVs in BDLF platoon is given by:
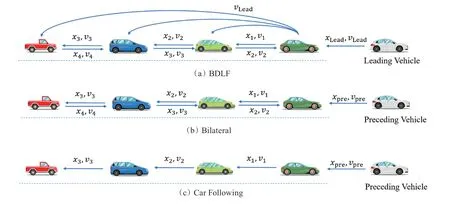
Fig.3 The topology and architecture of (a) BDLF,(b) Bilateral,(c) Car Following
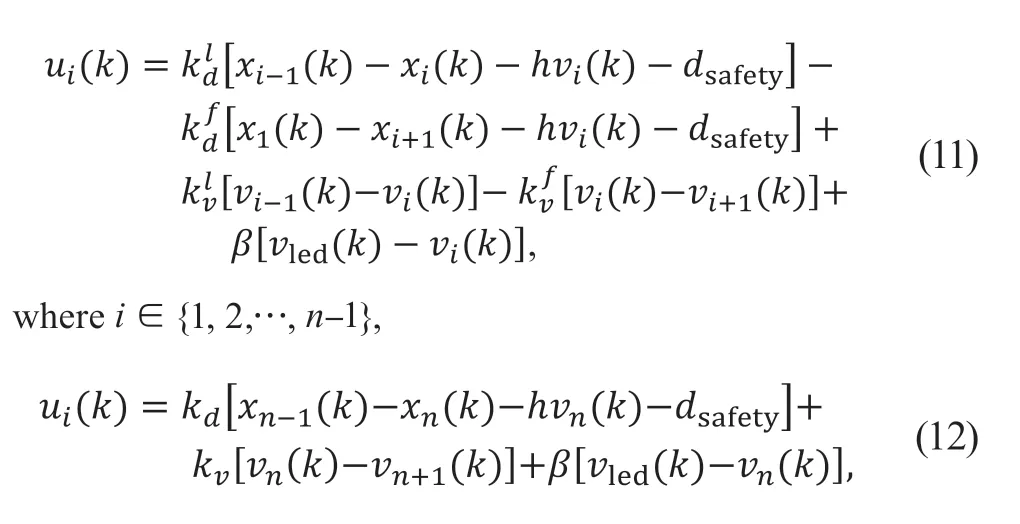
where the first two terms represent the desired distance from the front and following vehicles;the third and fourth terms represent the speed adaptation of front and following vehicles;and the fifth term represents the leader following speed,in Eq.(11).The control input of the last CAV in the platoon is presented in Eq.(12).The last CAV only considers the position and speed of the front vehicle and the leading vehicle’s speed.andindicate the weights of the inter-vehicle distances of the front and following vehicles,respectively.andindicate the weights of the inter-vehicle distance between the front and following vehicles;andindicate the weights of the speed adaptation for the front and following vehicles;βindicates the weights of speed adaptation;dsafetyis the minimum inter-vehicle distance;vledis the leading vehicle speed,which depends on the leading vehicle decision.The CAV acceleration is the control input of this system.The stability analysis of the BDLF strategy control has been investigated in literature[22-24].Previous studies only focus on platoon stability without any hard constraints.However,platoon stability cannot always guarantee collision-free.Therefore,for safety,a constraint based on optimal velocity model (OVM) for the control input is provided in[25].The input constraint of the CAV is written as:


whereκis the sensitivity of perceding vehicle;VOPis the optimial velocity.To summarise,the online controller makes decisions for the lead vehicle and controls the platoon in realtime.To ease understanding,the pseudo-code for the online controller is presented in Algorithm 2.
Algorithm 2 Online Controller Algorithm
5 Simulation
5.1 Simulation Setup
To validate the performance of the proposed two-stage ecoplatoon in real traffic environments,simulations based on real traffic data are carried out.This study creates the simulation environments based on the I580 road in California and the traffic data provided by the PeMS.The simulation environments include a 22.2 km motorway as shows in Fig.4.
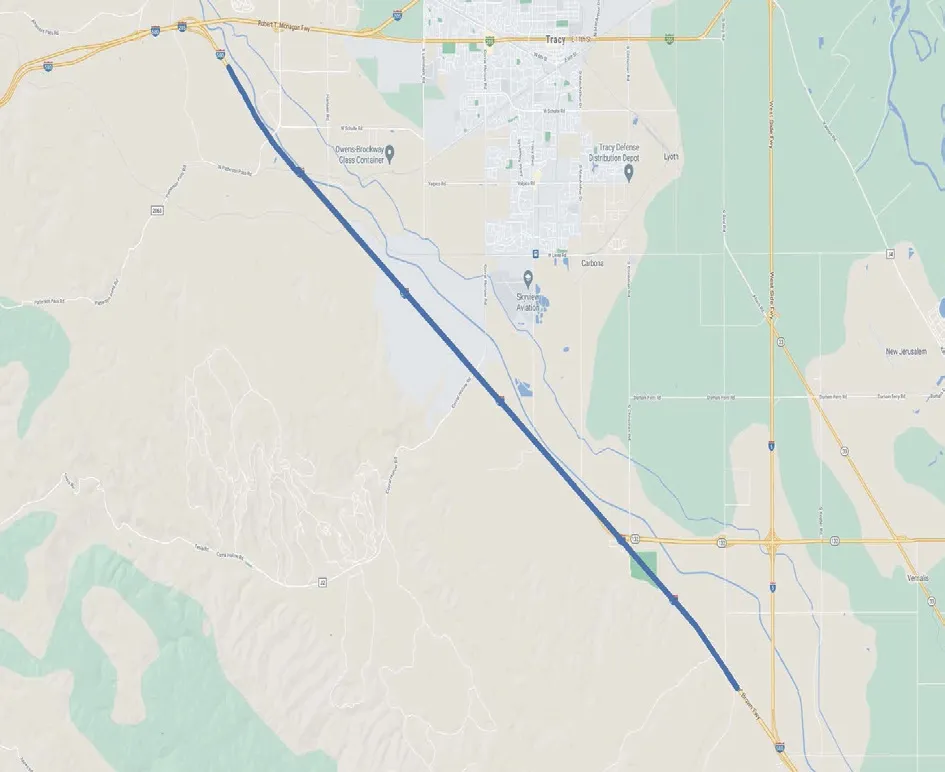
Fig.4 The real traffic environment.Test road I 580,the test vehicle drives from north to south
All simulations are conducted via MATLAB and Autonomie.A heterogeneous platoon containing four CAVs is used in this study.These four vehicles include (1) a 2.0 L gasoline enginemidsize car with 6 speed dual-clutch transmission gearbox;(2) a 2.2 L gasoline engine midsize sport utility vehicle with 6 speed automatic transmission;(3) a 2.0 L gasoline engine midsize car with continuously variable transmission;and(4) a 6.0 L gasoline engine pickup with 6 speed automatic transmission.The proposed strategy is compared to two multivehicle control benchmark strategies in the same scenarios.Two benchmark strategies are defined as:
· Multi-vehicles with ecologic adaptive cruise control (eco-ACC) following each other as shows in Fig.3c,denoted asCar Following.The eco-ACC maintains a safe distance from the front vehicle and minimises the total energy output of the vehicle by adapting the speed in real-time[26-27].The vehicles in the platoon are unable to communicate with each other.
· A CAV platoon with a bilateral control,where the vehicles in the platoon consider both the motion of the front and the following vehicle similar as the BDLF,denoted as Bilateral and shows in Fig.3b.However,the following vehicle in theBilateralplatoon do not consider the motion of the preceding vehicle.
In the platoon,only the first vehicle could receive the velocity and position of the preceding vehicles in all benchmark strategies.All the strategies are applied to the four vehicles with the same sequence to compare the energy efficiency.All the platoon strategies are tested in five different scenarios,which have the same average speeds for each scenario.
However,the scenarios have the different traffic densities and flows,so that all strategies have been thoroughly tested.
5.2 Road Test Simulation
To ensure robustness,strategies are tested five times.Therefore,to improve the quality of this paper,only the speed trajectories with obvious differences are discussed and the energy efficiencies are summarised.The offline planning
provides a reference based on traffic information.The proposed two-stage eco-platoon tracks the speed and controls the platoon using the online controller.
1)Two-Stage Eco-Platoon.
To clarify the leading vehicle results and the speed of platoon,a leading vehicle trajectory is created first and then the platoon speed plotted.Fig.5 and 6 show the speed trajectories of the reference speed and platoon speed.

Fig.5 CAV platoon with relatively large traffic disturbance
The subfigure in Fig.5a shows the phantom vehicle speed and leading vehicle speed in real-time.The solid blue curve is the phantom vehicle speed created by the reference speed and first vehicle position.The solid green curve is the speed of the preceding vehicle (Vehicle 0).The dashed red curve is the leading vehicle speed trajectory.Since the speed of the preceding vehicle is lower than the reference speed,the leading vehicle is influenced by the preceding vehicle for the most part between 100 s to 350 s.However,as the preceding vehicle accelerates after 350 s,the phantom vehicle is able to track the speed for the remaining journey.
Subsequently,the platoon speed is reflected in the subfigure of Fig.5b,where the leading vehicle is represented by a dashed blue curve.The speed trajectories of the vehicles from first to fourth are represented by red,yellow,purple,and green,respectively.All vehicles in the platoon follow the leading vehicle speed in real-time.These five curves coincide most of the time.Only small tracking errors occur when speed change because of the leading vehicle changing its tracking target.This tracking error mainly occurs between 210 s and 360 s in this scenario.Fig.6 shows a similar scenario,where the influence of the preceding vehicle is less than that in Fig.5.The leading vehicle tracks the preceding vehicle between 200 s and 245 s.

Fig.6 CAV platoon with relatively small traffic disturbance
2)Benchmarks Strategies.
TheCar Followingstrategy with eco-driving mothed based on MPC considers energy output minimisation and tracking of the speed limit is shown in Fig.7.The speed limit of the road is represented in blue.The red curve is the speed profile of the preceding vehicle.Vehicles 1 to 4 are represented in orange,yellow,purple and green,respectively.The vehicles in the group control themselves without communication between each member in the group.The initial speed of vehicles inCar Followingis higher than other methods,because the intervehicle distance at the beginning of the group of vehicles is langer than other methods.The vehicles started with high speed and drove with a typical Pulse and Glide (P&G) operation strategy[28].The P&G operation improves the vehicle energy efficiency at the acceptable speed range.The first vehicle decelerates and follows the preceding vehicle from 100 s,and all vehicles decelerate one by one.The energy optimisation for this group of vehicles is the most effective before 180 s.The results of the Bilateral strategy in the two different scenarios are shown in Fig.8 and 9.TheBilateralplatoon follows the preceding vehicle or tracks the reference speed.TheBilateralplatoon follows the preceding vehicle for most of the journey from 40 s,as shows in Fig.8.The vehicles speed within the first 40 s has small oscillations,as the platoon try to track the speed limit in the beginning before reaching the preceding vehicle.However,the oscillations increase significantly in the other scenarios,as shows in Fig.9.The oscillations between 440 s to the end of journey are caused by the platoon switch tracking targets between track the speed limit and tracking the preceding vehicle.
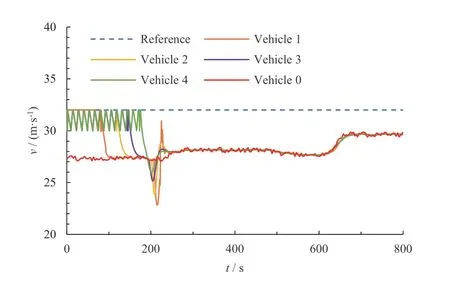
Fig.7 Speed profile of the group of vehicles controlled through the Car Following strategy
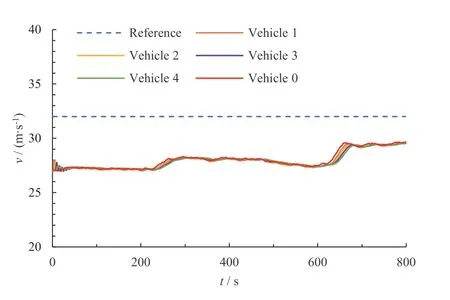
Fig.8 Smooth speed profile of the CAV platoon controlled through the Bilateral strategy

Fig.9 Oscillations Speed profile of the CAV platoon controlled through the Bilateral strategy
3)Energy Efficiency.
In order to compare the fuel consumption different between the platoon with the proposed strategy and benchmark strategies,a bar graph is plotted in Fig.10.The average fuel consumption for each vehicle by different strategies are illustrated.The proposed strategy (BDLF),the Bilateral and theCar Followingare represented in blue,red and yellow,respectively.TheCar Followingstrategy had the highest fuel consumption for each vehicle,while the results of the proposed strategy and theBilateralwere very close.For the second vehicle,the fuel consumption of theBilateralstrategy is even lower than the proposed strategy.However,the proposed two-stage eco-platoon strategy focuses on the platoon total energy efficiency over the whole route.Therefore,the average cumulative total fuel consumption of each strategy for the platoon is shown in Fig.11.Compared to theCar FollowingandBilateralstrategies the total fuel consumption of the proposed strategy is reduced by 21.4% and 10.1%.Overall,the proposed strategy for platoons demonstrated the best energy efficiency compared to the other strategies.
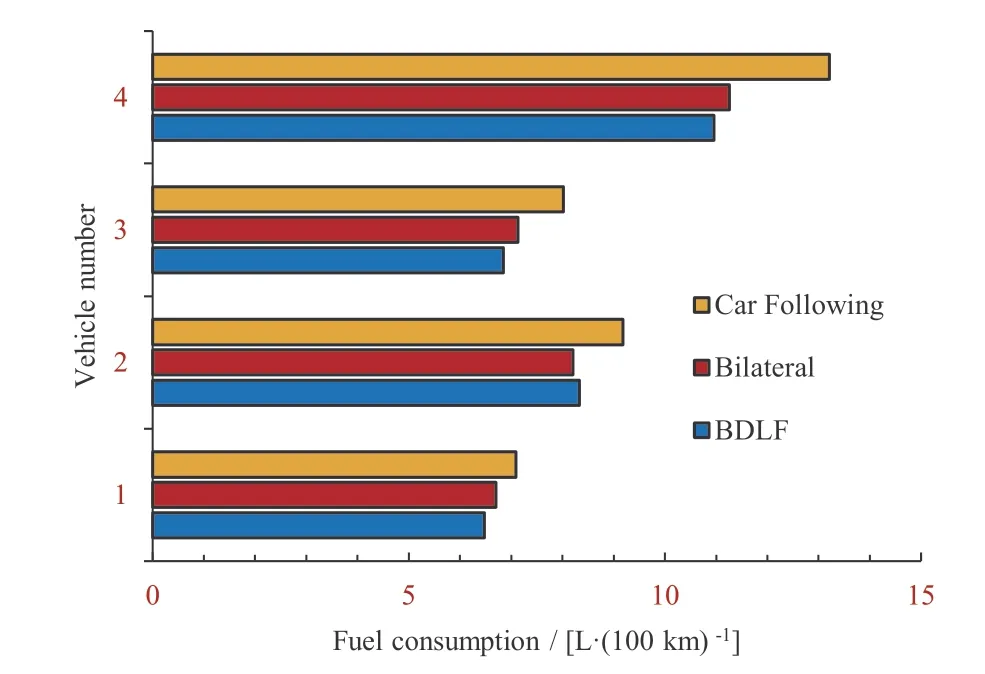
Fig.10 Average fuel consumption of each vehicle controlled through different strategy

Fig.11 Average total fuel consumption of vehicle group controlled through different strategy
6 Conclusion
Energy consumption optimisation of the heterogeneous vehicle platoon is different than that in individual vehicles.In this paper,the energy consumption of the platoon is considered as an integrated target to achieve the minimum total fuel consumption.The proposed strategy is formed using a twostage strategy,including offline planning and online controller.The offline planning considers the average speed of the subsections on the future routes.Therefore,the uncertainties of the reference speed profile of the platoon are reduced,and the reference speed is more feasible to be applied in practical driving.The online controller with the Bi-Directional Leader Following (BDLF) topology maintains the platoon string stability and adapts the speed of the platoon in real-time.As a result,the proposed strategy combines long term optimisation and real-time control,and has the best fuel efficiency compared to the benchmarks of the selected scenario.In the future,an eco-driving strategy will be developed for the mixed platoon,including human drive vehicles (HDVs) and CAVs.The ecodriving strategy will be directly applied to CAVs and then influence HDVs to reduce the total energy consumption.