双偏振相控阵雷达误差评估与相态识别方法
2022-01-28刘黎平
李 哲 吴 翀 刘黎平 宗 蓉 罗 鸣
1)(复旦大学大气与海洋科学系/大气科学研究院, 上海 200438) 2)(中国气象科学研究院灾害天气国家重点实验室, 北京 100081) 3)(深圳市国家气候观象台, 深圳 518000)
引 言
近年相控阵技术由军用逐渐向民用领域发展,从单偏振相控阵雷达向双偏振相控阵雷达发展。相比机械扫描雷达,相控阵雷达采用电扫描方式,多个发射和接收单元的发射接收系统,可实现快速扫描并获取更高分辨率的数据[1-3]。X波段双偏振相控阵雷达建设条件灵活[4],还可以弥补S波段双偏振雷达网低仰角存在观测盲区的不足,因此,中国气象局在广东开展了多部X波段双偏振相控阵雷达协同观测试验,对冰雹生成的微物理过程以及龙卷开展精细化研究[5]。
尽管相控阵雷达在扫描周期上具有优势,但过快采样会降低采样准确性,相控阵雷达的宽波束也会使距离雷达较远的回波被明显平滑,难以探测到细微结构。为了验证相控阵雷达数据的可靠性,刘俊等[6]对比分析X波段相控阵雷达与X波段机械扫描雷达的回波数据,发现相控阵雷达受平滑作用影响导致探测的弱回波面积减少,强回波面积增加。考虑到升级为双偏振的相控阵雷达,其双偏振参量的可靠性也很重要,因此需要对双偏振相控阵雷达的探测能力进行全面对比。双偏振相控阵雷达存在不同的数据误差,研究发现双偏振相控阵雷达因受接收机内部噪声[7]、大气环境扰动[8]以及回波自身变化等影响可产生严重的随机性误差。特别是对于数量级较小的双偏振参量,噪声会降低双偏振算法的稳定性。双偏振相控阵雷达还受阵列天线结构影响,雷达波束宽度、天线收发增益等系统参数随扫描角改变而变化,其中X波段雷达衰减比C波段、S波段雷达更强[9],从而导致严重的系统性误差[10]。系统性误差主要分为雷达整体性误差与仰角变化产生的误差[11],不同参量的系统性误差会对雷达相态识别方法产生不同影响,使识别准确性降低。因此需获取准确的随机性误差和系统性误差量级,并有必要定量分析该误差对于相态识别结果的影响。
双偏振雷达通过发射和接收水平及垂直方向的偏振波,获得不同形状、不同尺寸观测目标在不同方向的回波以及存在的差异信息,进而实现相态识别。目前相态识别常用模糊逻辑相态识别 (fuzzy logic hydrometeor classification,FHC) 方法,FHC方法由Zadeh[12]提出,经Straka等[13]和Zrnic等[14]引入雷达气象领域。FHC方法的主要优势在于利用隶属度函数设定各相态参量过渡阈值,有效解决不同相态之间参量重叠的问题,将多种参量的识别结果进行综合考虑,得到最合理的结果。然而,曹俊武等[15]发现FHC方法识别结果中各相态参量特征值并不明确。针对该问题,Park等[16]对FHC方法进行优化,加入融化层高度和降水类型等信息,并考虑数据误差和波束展宽影响,以提高数据特征值不明显相态识别结果的准确性。在不同误差对FHC方法识别结果影响的研究中,徐舒扬等[17]利用广州S波段双偏振雷达数据,通过引入系统性误差和随机性误差定量分析误差对于识别结果稳定性的影响,发现引入不同量级误差后相态识别结果变化明显,主要原因是FHC方法在相态识别过程中,部分参量间权重系数非常接近,由此得到的合成值也几乎相同,识别结果易受误差影响。水凝物相态识别是一种略为复杂的分类问题,Hunt等[18]提出的二叉决策树算法在分类中起重要作用,决策树算法易于理解并能够实现可视化分析,逐级将对象进行分类。X波段雷达数据衰减严重,误差较大,利用决策树算法可以提高衰减较小参量的优先级,降低误差较大参量对识别结果的影响,提高其准确性,因此研究决策树算法在X波段双偏振相控阵雷达相态识别中的应用有重要意义。
随着粤港澳大湾区相控阵雷达布网的推进[19-20],目前已有15部X波段双偏振相控阵雷达投入试运行。但受相控阵雷达独特的天线结构和扫描方式的影响,数据往往存在不同类型的误差,同时FHC方法识别结果易受误差影响出现异常相态,将影响新布网雷达的实际应用效果。因此,本文在定量分析X波段双偏振相控阵雷达不同类型数据误差的基础上,建立基本结构为二叉树的决策树相态识别(decision tree hydrometeor classification,DHC) 方法,对DHC方法进行误差敏感性检验和识别效果检验,并与FHC方法进行对比,以改善相态识别效果。
1 数据和方法
1.1 数据选取与质量评估方法
本文使用2020年3月4日—9月15日深圳求雨坛站X波段双偏振相控阵雷达(简称X-PAR) 22317个时次反射率因子ZH(单位:dBZ)、相关系数ρhv、差分反射率ZDR(单位:dB)、差分传播相移ΦDP(单位:(°))、差分相移率KDP(单位:(°)·km-1)等参量的三维体扫数据。X-PAR采用全相参脉冲多普勒、双偏振以及相控阵体制,数据水平分辨率为30 m,垂直方向为12层仰角,时间分辨率为92 s,原始数据经过衰减订正处理。通常S波段雷达衰减较弱,在升级改造过程中经过严格标定,观测数据可靠性高,因此为了与X-PAR原始数据对比,选取相同位置的S波段双偏振雷达(简称S-POL)作为参照雷达,S-POL水平分辨率为250 m,垂直方向为9层仰角,时间分辨率为6 min。
利用S-POL原始数据,对X-PAR的ZH和ZDR可靠性进行验证。由于两部雷达所处位置相同,高度相差9 m,可忽略经纬度匹配问题,根据S-POL原始数据格点的仰角、方位角、径向距离以及扫描时间,在X-PAR原始数据中找到仰角、方位角、扫描时间接近的格点。S-POL和X-PAR库长不一致,故以S-POL库长为基准,对该长度下的X-PAR原始数据进行平均处理,建立仰角、方位角、距离库一一对应的匹配点对,为了减小米散射对两个波段对比的影响,ZDR的误差计算仅选择小到中雨的降水过程。在此基础上,将误差细分为标定误差(时间和仰角)、衰减订正误差、波束展宽误差和随机误差,通过改变单一变量,保持其他变量不变,分类对误差定量分析。在讨论随机误差时,基于X-PAR原始数据,通过限制距离去除波束展宽带来的误差,限制ΦDP的大小去除衰减订正误差,固定仰角层去除仰角变化带来的标定误差,以及去除因时间变化带来的标定误差。其中仰角和距离的选择应保证匹配点对足够多且不受地物回波影响。同理在对标定误差、衰减订正误差和波束展宽误差讨论时,采用相同的限制条件去除其他误差干扰,但需要对原始数据进行滤波处理去除随机误差。限制条件见表1。

表1 X-PAR不同误差的限制条件Table 1 Limiting conditions for different errors of X-PAR
1.2 FHC方法的限制及DHC方法的优势
FHC方法通过构建隶属度函数,将输入的雷达参数利用模糊规则计算合成值,每个相态对应1个合成值,合成值最大的相态即为识别结果。FHC方法在计算过程中,不同参量的权重系数较接近,各参量优先级几乎一致,使得识别结果易受误差影响。X-PAR波长相比于S-POL更短,对于椭球粒子的后向散射截面更大,散射特性不同会导致一定误差,其中ZH偏差量级较小,接近0。对于直径较大的粒子,两种波长的ZDR存在明显差异,当粒子直径为0.3~0.8 cm时,X-PAR的ZDR偏大0.3 dB[21]。同时X-PAR还因阵列天线硬件限制存在较大系统误差以及衰减订正误差。在以上误差共同影响下,导致FHC方法识别结果出现异常,为解决上述问题,本文提出DHC方法,其流程如图1所示。
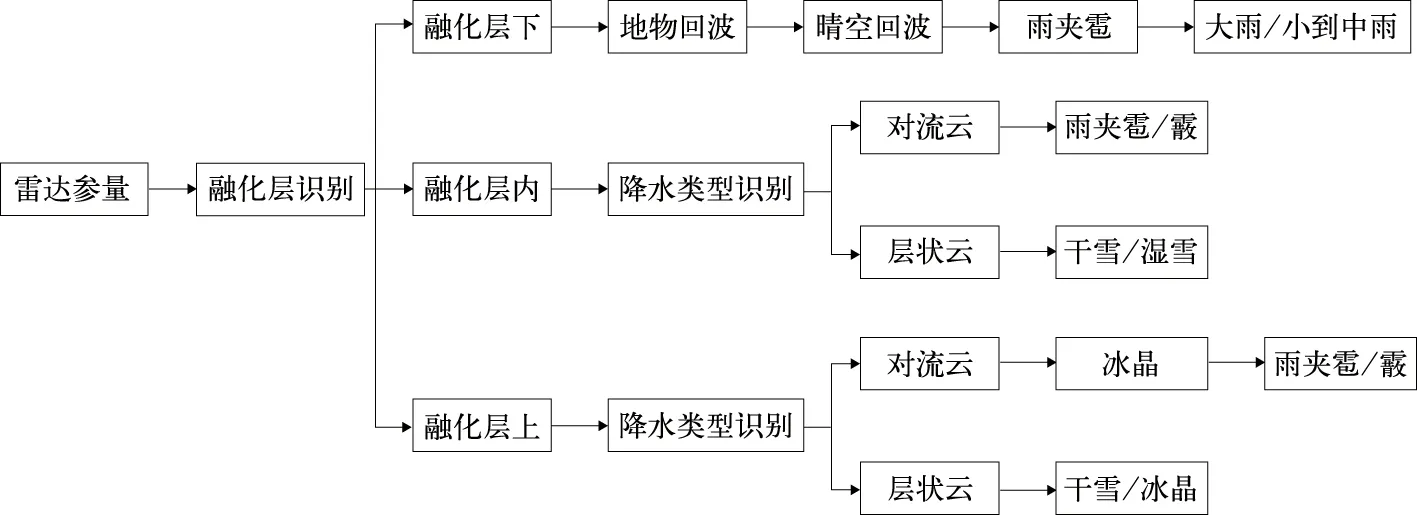
图1 DHC方法流程Fig.1 Flow chart of DHC method
在雷达参量的选用上, DHC方法保留FHC方法中ZH,ρhv,KDP及融化层高度和降水类型,误差较大的ZDR未保留。水凝物分类与FHC方法保持一致,包括以下9种:地物回波、晴空回波、干雪、湿雪、冰晶、霰、小到中雨、大雨和雨夹雹。DHC方法避开使用各个参量以及辅助信息同时进行判别,从特征值较为特殊且误差较小的参量开始,误差较大参量最后进行判别,逐级分离出相态,以降低误差对于相态识别结果的影响。在融化层以下,利用ZH,ρhv依次分离出参量特征范围明显的地物回波、晴空回波和雨夹雹,利用KDP区分大雨和小到中雨;在融化层内,通过ρhv区分层状云中的干雪和湿雪,ZH和ρhv区分对流云中的雨夹雹和霰;在融化层以上,将融化层高度和ZH相结合区分层状云中的干雪和冰晶,以取代误差较大的ZDR,对流云中则先利用ZH分离出冰晶,再结合ρhv区分雨夹雹和霰。判别过程中融化层高度信息通过MLDA(melting layer detection algorithm)[22]获得,在当日L波段探空数据获取的湿球温度0℃高度基础上,利用该高度上下位置雷达观测到的融化物空间分布情况计算不同方位角的融化层顶和底层的高度;降水类型采用肖艳姣等[23]提出的区分方法,将组合反射率因子水平梯度、35 dBZ 回波顶高的水平梯度和垂直累积液态水含量密度作为分离参数,利用模糊逻辑算法分离层状云和对流云。
针对DHC方法的效果评估,主要从两个方面与FHC方法开展对比。第一是方法的误差敏感性检验对比,由于X-PAR误差由系统性误差和随机性误差两部分组成[24],因此在对原始数据进行初步订正后,人为引入两种误差,统计两种方法各相态变化比例。第二是相态空间分布合理性对比,利用X-PAR滤波后数据,得到一段时间内融化层以下、融化层内和融化层以上各相态所占比例的统计结果以及典型个例相态分布结构,并以S-POL的识别结果作为客观验证,分析DHC方法识别结果的合理性。
2 基于统计的X-PAR误差分析
2.1 ZH及ZDR总误差
本文选取2020年3月18日10:30(北京时,下同)X-PAR和S-POL的ZH和ZDR原始数据进行对比,说明X-PAR总误差存在的特点,其中S-POL 仰角为4.3°,X-PAR仰角为4.5°,对比结果见图2。由图2可知,X-PAR反射率因子整体高于S-POL,受衰减作用的影响,X-PAR未探测到S-POL 90°~180°方位角强回波后的边缘弱回波。由于米散射效应,两部雷达的ZDR在ZH大于40 dBZ的区域差别较大。整体上,X-PAR的ZH和ZDR存在系统性偏移和随机波动,在距离雷达较远的位置,系统性偏移有增大趋势,可能是因为不同位置衰减订正效果不同和X-PAR波束较宽对雷达采样造成影响。以上对比表明:ZH和ZDR均存在一定误差,经统计ZH总误差80%以上位于-1~5 dB,平均为1.6 dB,ZDR总误差80%以上位于-0.8~0.2 dB,平均为-0.17 dB。总误差由多种因素共同导致,误差按特征表现为系统性误差和随机性误差,产生的原因主要有标定随时间和仰角的变化、衰减订正效果不同、波束宽度较宽和随机噪声,为了定量分析不同原因引起的误差占比及特点,需要对总误差进行分类讨论。
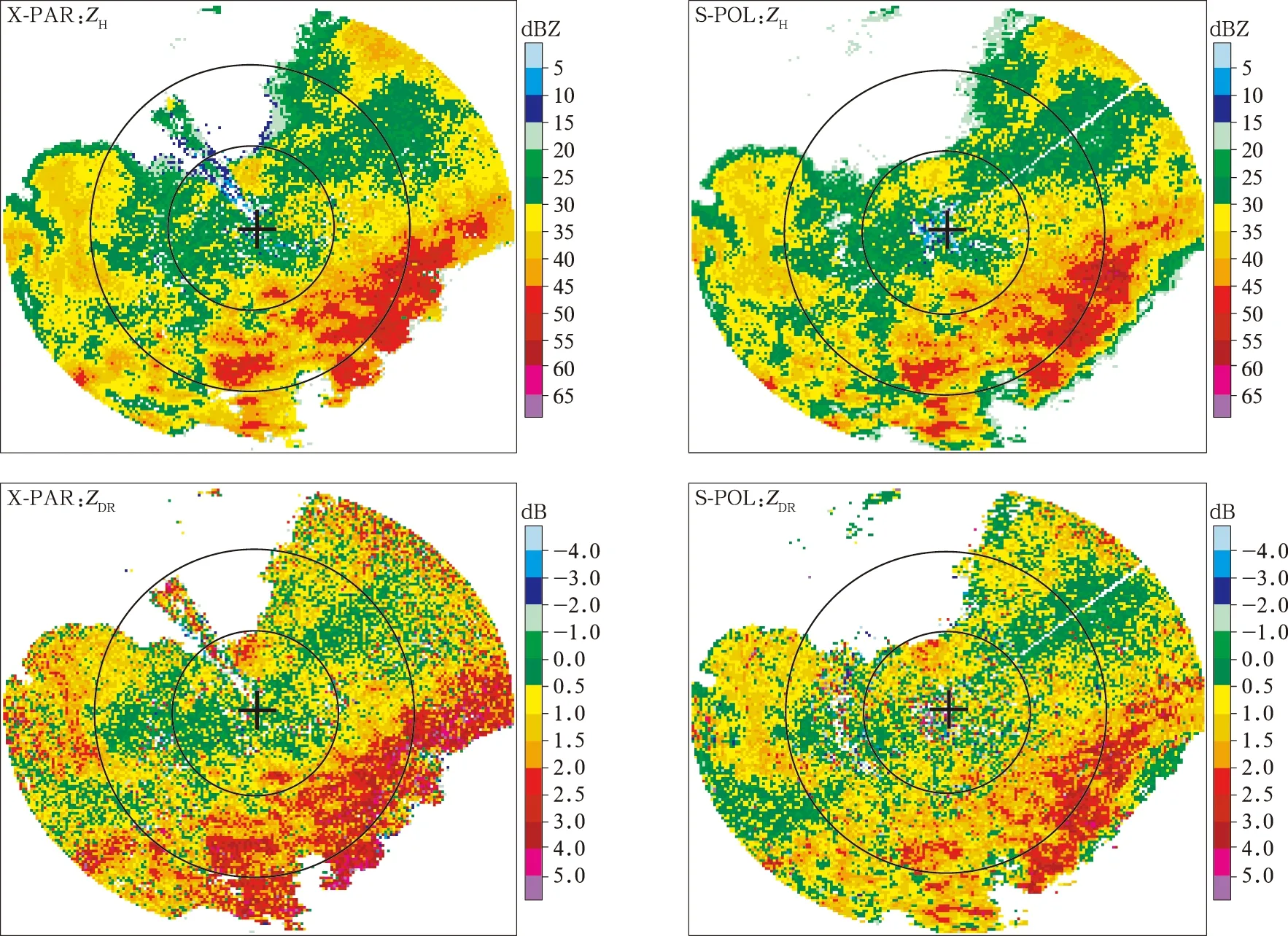
图2 2020年3月18日10:30 X-PAR与S-POL的ZH和ZDR水平结构(相邻距离圈间距为15 km,+为雷达位置)Fig.2 The horizontal structure of ZH and ZDR of X-PAR and S-POL at 1030 BT 18 Mar 2020(the distance between adjacent circles is 15 km,+ denotes the location of radar)
2.2 ZH及ZDR随机误差
依据表1,选取2020年3—9月降水个例,通过逐小时订正时间误差,保持距离、仰角和ΦDP不变讨论随机误差。由图3中X-PAR的ZH和ZDR标准差与随机误差对比频次可以看到,ZH随机误差均匀分布在零值上下,ZDR随机误差多处于-0.5~0.5 dB。随着标准差增加,两参量随机误差范围均有所扩大,但对于ZH标准差大于2 dB,ZDR标准差大于0.2 dB的区域,由于点数较少造成规律不明显,为了进一步探究随机误差的分布规律,分段绘制ZH和ZDR随机误差量级占比图,并与总误差进行对比。由图3可知,ZH和ZDR随机误差相对于总误差范围均有所减少,且更加聚集,其中ZH随机误差80%以上位于-2.5~2.5 dB,平均为0,ZDR随机误差80%以上位于-0.4~0.4 dB,平均为0。ZH标准差为0~3 dB比标准差超过3 dB的随机误差分布更加聚集,误差范围也相对减小,说明随着数据波动增加,随机误差也随之增加,但变化不明显;ZDR标准差变化也表现出相同趋势。为了降低随机误差对于后续相态识别结果的影响,采用以某格点前后4个库长为1组数据,对该组数据进行排序,去除极小值和极大值,求取该组数据平均值,对X-PAR原始数据进行滤波处理。
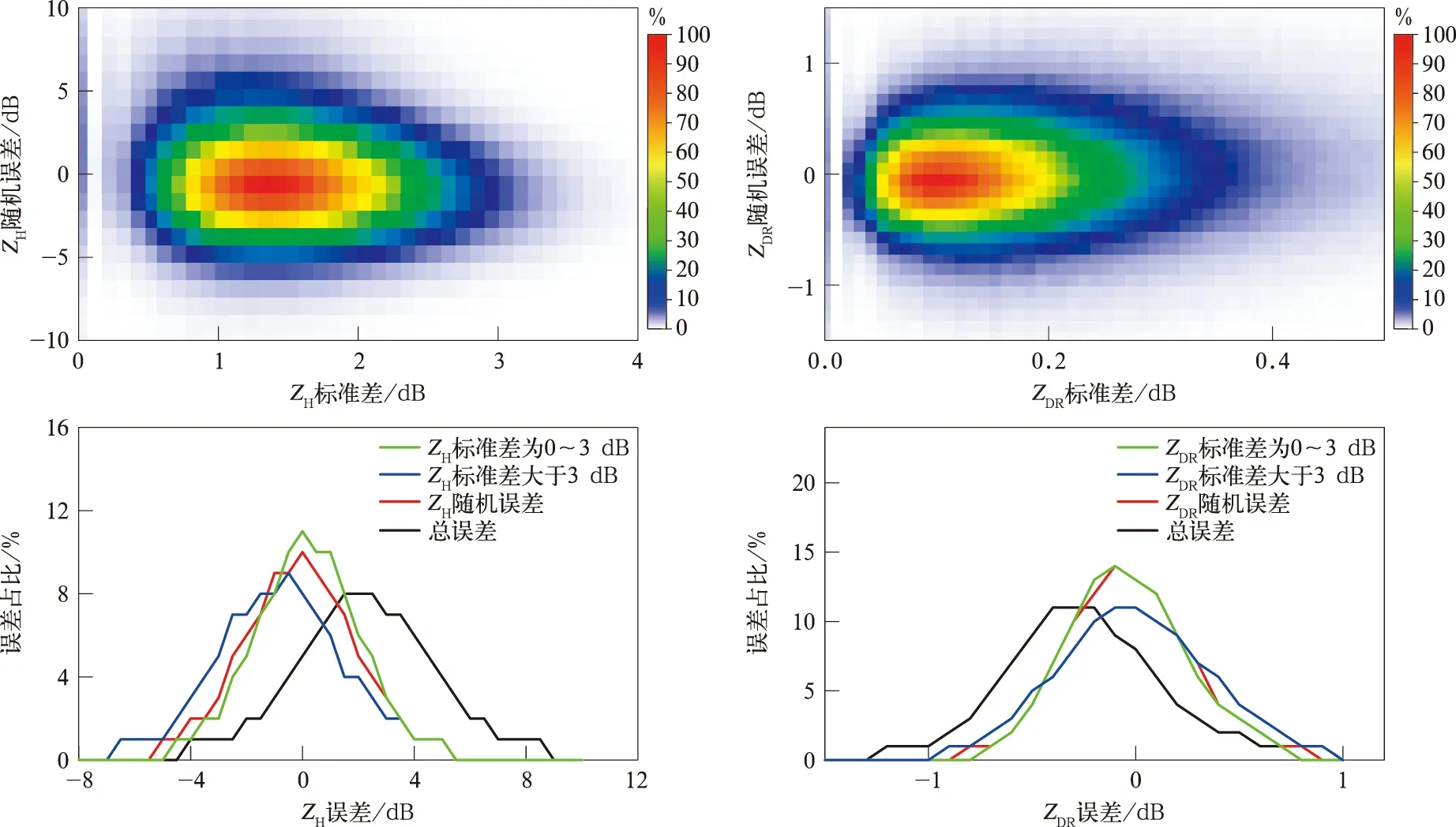
图3 X-PAR的ZH和ZDR随机误差对比频次及误差量级占比Fig.3 ZH and ZDR random error comparison frequency and error magnitude ratio of X-PAR
2.3 ZH及ZDR标定误差
X-PAR标定误差是时间变化产生误差与仰角变化产生误差的叠加,因此将标定误差分为时间误差和仰角误差进行讨论。依据表1,利用2020年3—9月滤波后数据,保持距离、仰角和ΦDP不变讨论时间误差,分析误差对比频次及时间误差量级占比(图4)。去除时间误差,利用同时间的滤波后数据,通过保持距离、ΦDP不变讨论仰角误差,对仰角进行分段,选择-5.0°~-1.5°,-10.5°~-5.1°两段,分析ZH和ZDR的仰角误差量级占比(图4)。由ZH及ZDR时间误差频次可以看到,两参量因时间变化产生的误差分布均匀,不因时间改变产生较大变化,时间误差量级占比显示在去除其他误差后,ZH及ZDR时间误差的范围相对更加聚集,其中ZH时间误差80%以上位于-0.5~4.5 dB,平均为2.3 dB,ZDR时间误差80%以上位于-0.6~0 dB,平均为-0.23 dB。仰角误差量级占比显示仰角变化产生的ZH误差相对较小,且误差范围对称分布在0附近,ZH仰角误差80%以上位于-2.5~2.5 dB,平均为0.43 dB, 而ZDR仰角误差相对较大,80%以上位于-0.7~0.1 dB,平均为-0.22 dB,同时受X-PAR收发增益因扫描指向角改变而发生变化的影响,仰角偏离法向更多,误差范围更大。定量分析时间和仰角变化产生的标定误差,可以发现两种误差量级均较大,因此对滤波后数据进行逐小时订正,以提高相态识别结果的准确性。
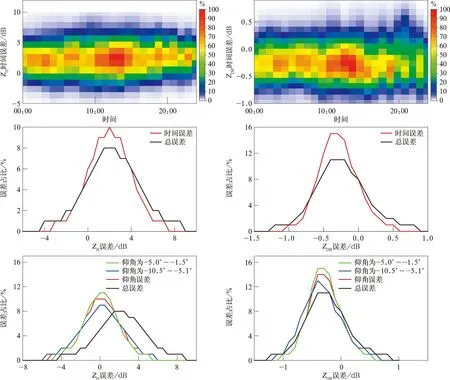
图4 X-PAR的ZH和ZDR标定误差对比频次及误差量级占比Fig.4 ZH and ZDR calibration error comparison frequency and error magnitude ratio of X-PAR
2.4 ZH及ZDR衰减订正误差
X-PAR原始数据经过衰减订正处理,但在强回波和弱回波订正效果并不相同,即出现衰减订正误差。依据表1,利用2020年3—9月滤波后数据,通过逐小时订正时间误差,保持距离和仰角不变讨论衰减订正误差(图5)。由图5可知,ZH衰减订正误差主要分布在-3~3 dB,ZDR衰减订正误差主要分布在-0.7~0.2 dB,但随着ΦDP增加,点数减少,误差变化规律不明显。为了进一步探究衰减订正误差的量级,对ΦDP进行分段讨论,结果显示ZH衰减订正误差80%以上位于-3~3 dB,平均为0.57 dB,ZDR衰减订正误差80%以上位于-0.7~0.2 dB,平均为-0.19 dB。通过对比ΦDP不同的ZH和ZDR衰减订正误差发现超过40°的ΦDP误差范围明显增大,主要因为衰减订正采用固定系数,衰减越大,订正的误差也越大,所以该误差主要受衰减订正效果影响,且仅在距离雷达较远、衰减较强的区域较严重。
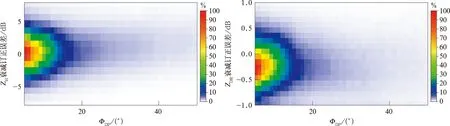
图5 X-PAR的ZH和ZDR衰减订正误差对比频次及误差量级占比Fig.5 ZH and ZDR attenuation correction error frequency and error magnitude ratio of X-PAR

续图5
2.5 ZH及ZDR波束展宽误差
X-PAR波束宽度较宽会影响雷达径向探测能力。依据表1,利用2020年3—9月滤波后数据,通过逐小时订正时间误差,保持ΦDP和仰角不变讨论波束展宽误差。由图6可知,ZH波束展宽误差主要位于-2.5~2.5 dB,ZDR波束展宽误差主要位于-0.3~0.2 dB,两参量误差随距离增加无明显变化趋势。为了进一步分析波束展宽对数据的影响,讨论不同距离范围误差量级占比,图6显示ZH波束展宽误差对称分布在0附近,其中80%以上位于-2.5~2.5 dB,平均为0.39 dB,ZDR误差80%以上位于-0.7~0.2 dB,平均为-0.21 dB。通过对比5~15 km和34~42 km的误差占比可知,误差随距离改变未发生明显变化,说明该部分误差主要是X-PAR波束宽度较宽导致对分散的气象目标采样时,目标统计特征被严重均一化而产生误差,且ZH误差量级较小,ZDR较大。
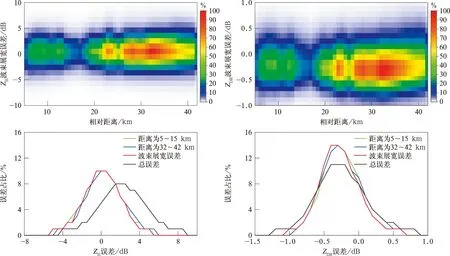
图6 X-PAR的ZH和ZDR波束展宽误差对比频次及误差量级占比Fig.6 ZH and ZDR beam broadening error frequency and error magnitude ratio of X-PAR
3 DHC方法与FHC方法对比及识别结果验证
3.1 相态识别方法误差的敏感性试验
由于ZDR整体误差较大,DHC方法中未使用该参量。基于数据订正后的2020年3—9月降水个例,选择向数据引入变化范围为-3~3 dB的ZH平均系统误差, 采用生成高斯白噪声方式模拟平均值为0,不同量级标准差的ZH随机误差。图7为两种方法分别引入ZH系统误差和随机误差后各相态变化率,ρhv和KDP的误差影响较小可忽略。由图7可知,ZH系统误差对DHC方法识别的雨夹雹、大雨、霰和晴空回波影响较大,其中雨夹雹和晴空回波变化率为-50%~50%,大雨和霰变化率为-25%~25%。ZH系统误差对FHC方法识别的大雨、霰、晴空回波、冰晶、湿雪、地物影响较大,其中雨夹雹和冰晶变化最大,雨夹雹变化率为-40%~90%,冰晶为-50%~60%。ZH随机误差仅对DHC方法识别的雨夹雹产生较大影响,其变化率最大达到60%,对于其余8种相态,DHC方法识别的变化率均小于10%,特别是地物、干雪、湿雪和小雨,变化率接近0。ZH随机误差对FHC方法识别雨夹雹、大雨、冰晶、晴空回波和地物均有影响,其中雨夹雹变化率可达130%,大雨为70%,冰晶、晴空回波和地物为20%。通过向两种方法引入ZH不同误差,雨夹雹、大雨和霰识别均对ZH误差敏感,原因主要在于3种相态的ZH权重很大,识别结果很大程度上取决于ZH的大小,但对于冰晶、湿雪、地物,FHC方法相态识别变化率均大于DHC方法。
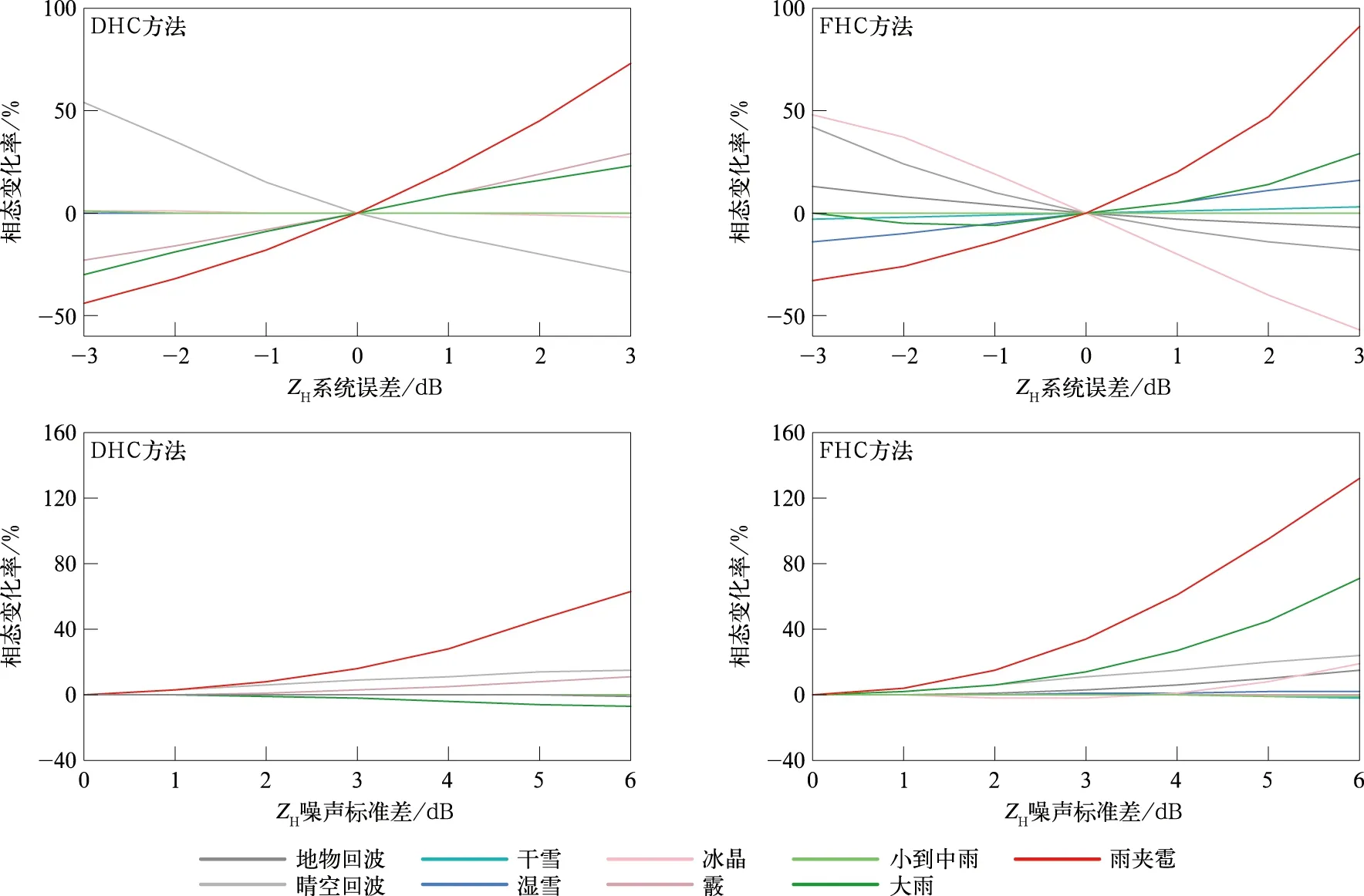
图7 向ZH分别引入系统误差和随机误差后相态变化率Fig.7 Phase change rate after introducing system error and random error to ZH
3.2 相态识别结果的空间分布对比
选取2020年3—4月X-PAR典型降水个例分为融化层以下、融化层内、融化层以上3个高度进行识别结果统计,计算各高度不同相态所占比例。通过计算得到两种方法对于干雪、湿雪、冰晶、小雨、大雨等相态的识别结果无明显差异,5种相态存在的环境完全符合其生成所需的条件,两种方法识别结果基本合理。但在融化层内,FHC方法识别出地物和晴空回波两种异常相态,其中7%的地物处于该层次,晴空回波为20%,3—4月融化层位于3400 m高度,该高度下不应出现这两种相态。同时两种方法均识别出雨夹雹,通常雨夹雹出现在融化层附近,其数量随高度增加而减少[25],且周围应有霰和湿雪存在。DHC方法识别的雨夹雹在3个高度上均存在,而FHC方法识别的雨夹雹仅存在于融化层以下,未识别出霰,这不符合雨夹雹和霰的实际分布规律,可见DHC方法对于地物、晴空回波、霰和雨夹雹在各层次的相态空间分布结果更加合理。
3.3 典型个例的相态识别结果对比及合理性
图8为2020年3月18日09:37对流云降水个例中 X-PAR和S-POL的ZH,ρhv和ZDR空间分布。由图8可知,S-POL在该区域ZH超过45 dBZ,A区域强中心甚至达到60 dBZ,对应强中心的ρhv低于0.94,表现为明显的雨夹雹特征。B区域和C区域ZH超过45 dBZ,ρhv大于0.95,且处于融化层以上,更符合霰的特征。云内相态结构表现为融化层内主要是冰雹和霰,融化层以下强回波区域主要是大雨,融化层以上主要是霰。对应X-PAR的观测结果(图8),A区域回波同样较强,但在强回波后出现了强衰减导致的V型缺口,在V型缺口的两侧ZDR由正值突变为负值,ρhv也因X-PAR信噪比低,而被明显低估,同时B区域的ZH也有较强的衰减,衰减可达5 dBZ以上。在这种因衰减导致误差较大的对流云降水中,利用X-PAR滤波后数据的 FHC方法在A区域、B区域、C区域的识别结果与利用S-POL原始数据得到的识别结果存在明显差异(图9),A区域内,FHC方法因ρhv被低估将X-PAR探测水凝物识别为地物;在V型缺口两侧以及B区域、C区域, FHC方法会因衰减将X-PAR探测水凝物识别为冰晶或干雪。而DHC方法对X-PAR探测水凝物的识别结果在强回波以及强回波后的衰减区与S-POL识别结果基本一致,相对于FHC方法识别结果更加合理。但当衰减过大时,如在B区域,X-PAR的ZH衰减超过5 dBZ,误差过大导致两种方法对X-PAR探测水凝物的识别结果均存在异常。
图8 2020年3月18日09:37 X-PAR和S-POL的ZH,ρhv和ZDR水平结构(6.3°仰角)Fig.8 The horizontal structure of ZH,ρhv and ZDR of X-PAR and S-POL at 0937 BT 18 Mar 2020(the elevation:6.3°)
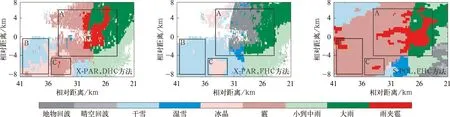
图9 DHC方法和FHC方法对于2020年3月18日09:37 X-PAR和S-POL探测水凝物相态识别结果(6.3°仰角)Fig.9 Hydrometeor classification results of DHC method and FHC method in X-PAR and S-POL at 0937 BT 18 Mar 2020(the elevation:6.3°)
选取2020年5月11日23:00大范围层状云降水个例,对比两种方法在层状云中相态识别结果的合理性。由图10可知,X-PAR和S-POL对ZH和ZDR观测结果差异不明显,而在距离雷达15 km范围内,S-POL易受地物影响而存在较大范围ρhv偏小的区域。在距离雷达30 km以上的融化层附近,X-PAR受宽波束的影响出现部分方位角融化层附近ρhv被低估的现象。从两部雷达各参量分布可以看到,该个例在融化层以下主要为小到中雨,融化层及融化层以上主要为干雪、湿雪和冰晶等相态。对应图11的相态分布, DHC方法对X-PAR探测水凝物的识别结果与S-POL识别结果基本一致,符合图10中雷达参量的分布特点,但对于S-POL,由于靠近雷达的ρhv偏小,所以在融化层以下识别出较多的地物回波。对比两种方法利用X-PAR滤波后数据得到的识别结果可知,FHC方法受雷达宽波束的影响在靠近融化层以下的区域识别出大范围地物,可见FHC方法因地物回波的ρhv权重较大,导致识别结果产生误判。
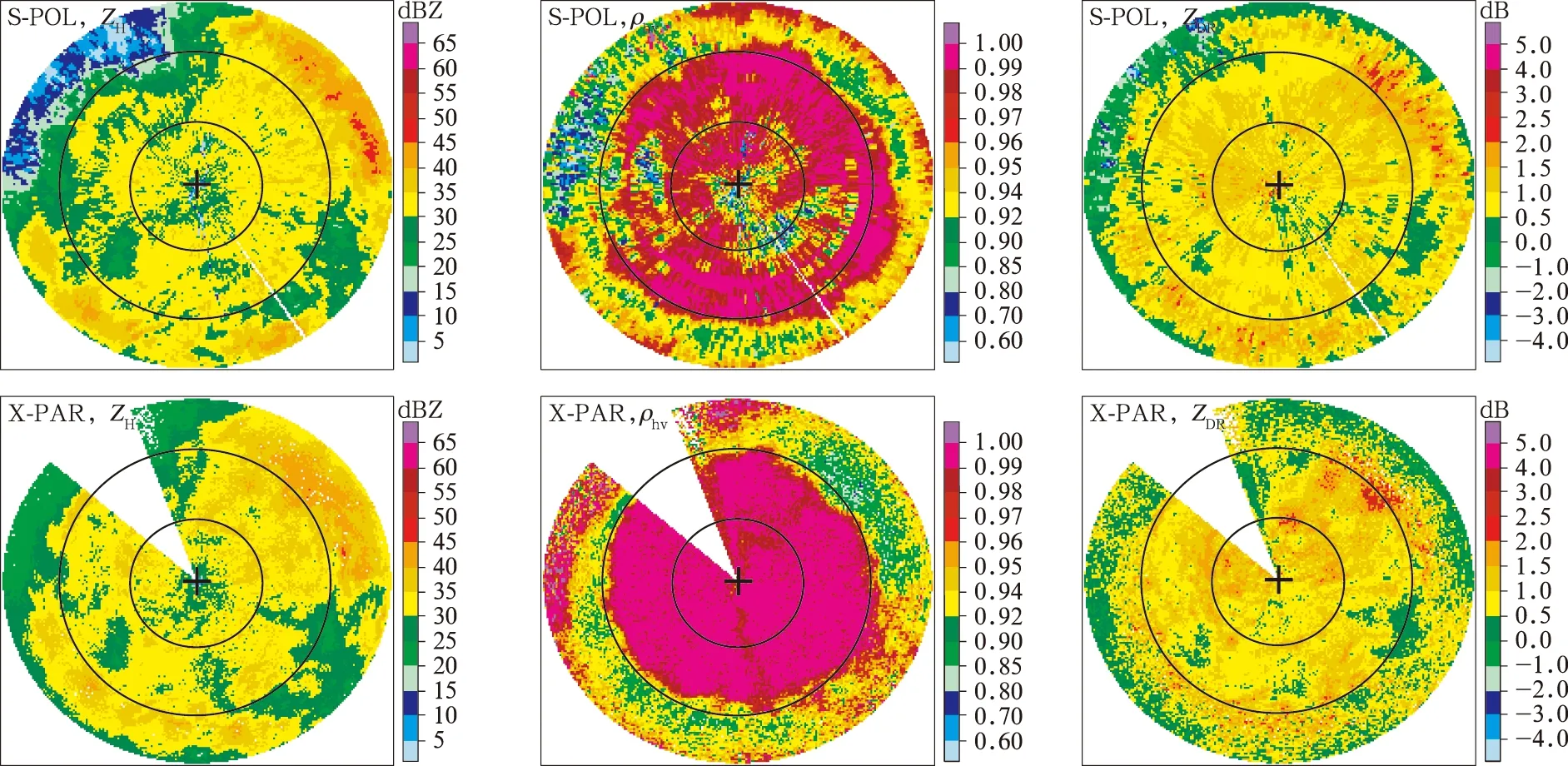
图10 2020年5月11日23:00 X-PAR和S-POL的ZH,ρhv和ZDR水平结构(6.3°仰角, 相邻距离圈间距为15 km,+为雷达位置)Fig.10 The horizontal structure of ZH,ρhv and ZDR of X-PAR and S-POL at 2300 BT 11 May 2020(the elevation:6.3°,the distance between adjacent circles is 15 km,+ deontes the location of radar)

图11 DHC方法和FHC方法对于2020年5月11日23:00 X-PAR和S-POL探测水凝物相态识别结果(6.3°仰角, 相邻距离圈间距为15 km,+为雷达位置)Fig.11 Hydrometeor classification results of DHC method and FHC method in X-PAR and S-POL at 2300 BT 11 May 2020(the elevation:6.3°,the distance between adjacent circles is 15 km,+ deontes the location of radar)
4 结论与讨论
研究表明:
1) 对X-PAR的ZH和ZDR误差定量分析表明:两参量的标定误差和随机误差均较大,ZH误差变化范围为-0.5~4.5 dB,ZDR误差变化范围为-0.7~0.2 dB,其中因仰角变化产生的标定误差随扫描角偏离阵面法向而增大。衰减订正误差及波束展宽误差相对较小,ZH误差为-2.5~2.5 dB,ZDR误差为-0.7~0.1 dB。同时,衰减订正误差因衰减增强而增大,而波束展宽误差随距离的变化并不明显。
2) 通过向误差订正后X-PAR的ZH引入系统性误差和随机性误差进行检验,DHC方法和FHC方法识别的雨夹雹、晴空回波、大雨和霰受ZH误差影响较大,其中雨夹雹和晴空回波因ZH系统性误差产生的变化率为-50%~50%,大雨和霰的变化率为-25%~25%。对于其余5种相态,DHC方法因ZH系统性误差和随机性误差产生的变化率低于10%,普遍低于FHC方法中的相态变化率,相态识别结果稳定性整体高于FHC方法。
3) 通过选取典型个例,利用S-POL原始数据得到的识别结果检验DHC方法在X-PAR滤波后数据中的实际应用效果。发现在对流云降水中,DHC方法对于融化层以下的雨夹雹和大雨区分力更强,相态垂直结构更加连续,且DHC方法不会因衰减产生误判。在层状云降水中,DHC方法不会因ρhv被低估将水凝物识别为地物回波。
由于X波段数据衰减严重,当衰减超过5 dBZ时,DHC方法也因较大误差存在误判。相控阵天气雷达作为一种新型天气雷达,还未在我国北部地区广泛布网,因此如何提高强衰减条件下DHC方法的可靠性,验证该方法在我国北部地区应用效果还需要开展更多工作。
