多功能护理床智能技术的研究进展*
2022-01-26李素姣朱华瑞胡冰山喻洪流苏颖兵
李素姣,朱华瑞,胡冰山△,喻洪流,苏颖兵
(1.上海理工大学康复工程与技术研究所,上海200093;2.上海康复器械工程技术研究中心,上海200093)
1 引 言
据全国老龄办统计数据显示,截至2019年末,我国60周岁及以上的老人为25 388万人,占总人口的18.1%,而需要长期卧床的失能或部分失能老人约为4 000万人。此外,由疾病及事故造成的残障人士的护理康复需求也日益凸显。老龄化的严重加剧和庞大的卧床患者数量给医疗资源和护理工作带来严峻挑战,进而导致护理质量的不足及护理效率低下[1]。护理床作为一种最主要的康复护理设备,有效缓解了护理人员对卧床患者的护理压力。但是,传统护理床远不能满足不同程度的失能卧床患者的日常需求,因此,多功能智能护理床已成为国内外众多康复器械研究机构和企业的研究热点,一系列适用于各类应用场景和不同患者需求的多功能智能护理床产品被相继开发。
与传统护理床相比,多功能护理床可以根据患者实际需求提供相应辅助功能,如坐卧姿态转换、辅助翻身、温度检测等,这为卧床患者自行处理日常生活提供了极大方便,增加了患者自主护理能力[2]。多功能护理床智能技术的发展和应用大大缓解了护理人员的工作压力,也让患者护理工作变得数字化、智能化。
我们在查阅国内外大量文献的基础上,分析多功能护理床智能控制技术的研究发展,基于功能类型将护理床分为基础功能型、二便护理型和自主移动型,重点阐述护理床智能控制中最为关键的自动对接技术及其原理,并进一步总结目前多功能智能护理床的发展现状及技术趋势。
2 基础功能型
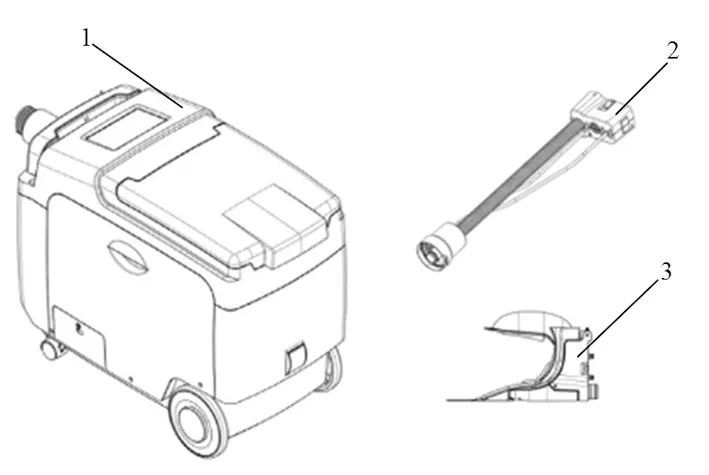
基础功能型护理床主要针对需要卧床康复的术后患者或存在运动障碍不能独立坐卧、曲腿伸展、翻身等一般卧床患者。护理床发展之初,仅在木制或钢制的普通病床上增设护栏、输液杆、脚轮、接便盆等。90年代后随着机电和计算机技术的发展,电动护理床逐渐取代传统护理床[3]。经过近三十年的发展,起背、抬腿已成为多功能护理床的基本功能,其床体结构见图1。通过连杆铰链结构和直线推杆结构来帮助患者实现姿态变换,部分护理床还能实现床体左右侧翻和侧平[4],可以更好地降低和预防褥疮等并发症的发病率。其中各姿态变换模块具体参数参照国家标准GB10000-88《中国成年人人体尺寸》,外形设计等遵循人机工程学,符合大多数使用者的日常习惯[5]。
美国Hill-Rom公司推出的Care Assist系列多功能护理床及Centrella电动护理床均将床体与轮椅功能融为一体。前者见图2[6],可完成抬腿、起背、空间转移等,而后者还可以调整床面高度,并能够通过配备的充气床垫达到预防褥疮的效果,但该类型护理床体积大,占用较大空间,且笨重的床体不利于推行转移,难以适用大众家庭及普通病房狭小的空间,因此,多应用于医疗机构。
基础型护理床能够满足普通患者术后卧床康复和存在运动障碍的一般失能患者的日常生活,而既能完成卧床护理,又有较好移动能力的护理床还需进一步开发改进[7-8]。

图2 Care Assist护理床Fig.2 Care assist nursing bed

图3 新松坐便轮椅
3 二便护理型
除了帮助患者改变卧床姿态,二便问题同样是护理工作中较为繁琐的环节,如何保证患者或失能老人便捷舒适地完成大小便是护理设备研发的重点之一[9]。针对不同程度失能患者大小便处理需求,护理床技术发展经历阶段见表1。

表1 护理技术发展
技术发展促进护理工作由纯人工辅助到全自动智能处理的转变。图3为日本新松坐便椅,患者被转移至坐便椅后,护理人员将坐便椅移至马桶上方,调整高度使底部贴合马桶坐垫圈,完成患者大小便[10],该设计缺点在于其转移患者的过程繁琐、费时费力,且无法完全实现普通轮椅的功能;而国产鱼跃轮椅采用一体化设计思路,将轮椅与坐便椅相结合,与前者相比,在保留了轮椅所有正常功能的前提下,增加了坐便椅的如厕功能,可在室内配合马桶使用,也可以在户外使用抽式便盆。但二者在解决长期卧床患者的二便问题上仍显得过于繁琐。
为避免患者在转移过程中受到二次伤害,降低医护人员工作强度,市面上多采用嵌入式便袋或电动升降盆帮助患者在卧床状态完成二便护理,该方式因其结构简单、价格便宜,在各种护理场景下得到广泛应用。采用此方式的问题在于便后处理相对麻烦,极易污染床体,因此,全自动二便护理机器人的设计研发得到了国内外研究人员的密切关注。
日本自2008年起连续开发了四种二便护理机器人[11-14],其中Ever Care全自动护理机器人,见图4。该装置内部包含二便自动感应器和各种喷嘴(冲洗喷嘴、清洁喷嘴、烘干喷嘴),患者穿戴后便可以全天候、全自动处理大小便,设备自行感应、自动冲洗、自动暖烘干、自动消毒除臭,整个使用环境无异味。苏州伊利诺护理机器人的产品结构和当前国际主流产品基本相同,见图5,设备分为主机、软管和工作头三个部分,并基于现有智能护理技术对产品用料作出创新,如护理机器人工作头与人体连接处包裤采用Clear Max特种抗菌纤维制成,穿戴方便透气性好可水洗,大大提升患者舒适度并在一定程度上有效预防褥疮。高度智能伴随着高昂价格,普通家庭难以承担。

图4 Ever Care护理机器人 Fig.4 Ever Care nursing robot
由上可知,从最初将患者转移至轮椅辅助排便到二便装置基于护理床的嵌入式设计,护理人员均需要提前做准备工作,嵌入式设计带来的便后处理工作同样繁琐。全自动护理机器人将二便装置作为独立模块置于床旁与护理床配合使用,不仅提高了护理人员工作效率也保证了患者二便舒适度,但高昂的价格使其在普通护理场景下难以普及。
注:1.机器人主机;2.连接软管;3.工作头
4 自主移动型
护理人员照看患者时,尤其对于术后或是身体需要保持相对稳定的患者,转移难度极大[15],因此,床椅一体化护理床开始被设计研发,该类产品旨在开发一款兼具床和轮椅功能的护理床,可以省去患者由床体至轮椅的转移过程,并具备一定的自主移动功能[16-17]。
传感器技术的发展,促进了自主移动设备在医学和空间探索等领域的广泛应用[18],而在多功能护理床研发方面,基于现有的自主移动机器人技术,多功能护理床的分离对接和自主移动功能逐渐趋于成熟。分离对接基于护理床功能模块化概念,即将护理床分为床体和智能轮椅两个模块,患者可根据自身需求使用相应功能。如对接态时,护理床具备辅助患者抬腿、起背、翻身等基本功能;分离态时,患者可使用智能轮椅自主移动,解决转移出行问题。
4.1 分离对接方式
基于可分离式护理床的研究,床椅分离对接方式可分为侧向分离式和中央嵌入式。
4.1.1侧向分离式 侧方位对接分离是当前较为常见的分离对接方式,医护人员需提前将患者转移至轮椅一侧,再进行床椅分离,移动对接。基于床体结构大体可分为单边结构和双边结构。
单边结构床体对接侧预留对接豁槽,轮椅通过自身传感器及运动控制器经过相关算法融合和运动校准,从床体预留对接豁槽侧横向移动至床体内,再由坐姿转换为平躺姿态,从而完成对接,见图6。胡木华等[19]开发了模块化、多姿态变换的E-Bed系统。采用多类传感器如激光雷达、碰撞传感器等采集轮椅位姿数据,并结合电机控制最终实现床椅自动对接。双边结构则是将对接侧床体设计成折叠开合式,轮椅先由平躺姿态转换为坐姿,待对接侧完全打开后移出床体,在收到对接指令后,对接侧床体保持打开状态,轮椅进入床体后再自动合上,此时轮椅转换回平躺姿态,完成分离和对接。同单边结构相比,双边结构较为复杂,床体占地面积大且对接过程对空间要求较高,但对患者安全性更佳。
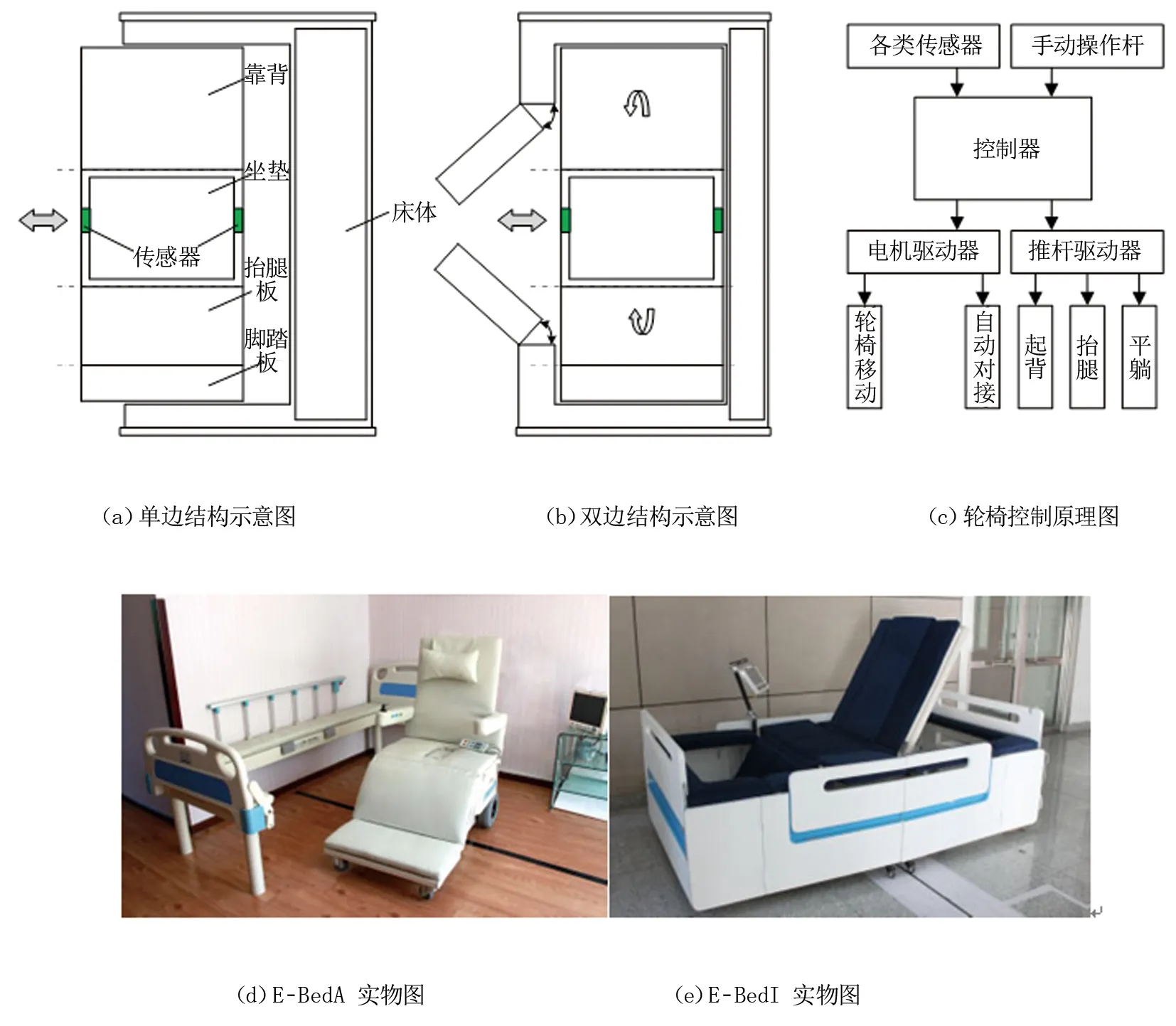
图6 E-Bed系列[19]
4.1.2中央嵌入式 中央嵌入式护理床轮椅位于床体中部,由床尾部完成分离和对接,同侧向分离式相比,解决了智能轮椅水平横移的难题。
上世纪90年代,Mascaro便提出可重构的轮椅床系统,床体采用双边结构,轮椅位于床体中部,并通过姿态变换实现床椅系统的重构[20]。其控制原理同侧向分离式基本相同,轮椅转换为坐姿后由床尾部向前驶出,收到对接指令后,轮椅在床体附近任意位置逐步调整位姿至背对床体尾部并向后驶入床体实现床椅对接,最终由坐姿转换为平躺姿态。见图7,由王海涛等[21]设计研发的分体式多功能护理床,床椅对接采用中央嵌入式,轮椅采用翻身电机、导杆配合安装架和翻身轮实现翻身功能,床体双边结构可有效防止卧床患者滑落。同侧向分离式相比,双边结构无需提前将患者由床体侧转移至轮椅侧,而中央嵌入式结构为患者翻身问题预留了解决空间,结合自动翻身机构可有效预防患者褥疮。

(a) 实物图 (b) 翻身功能示意图
4.2 分离对接原理
智能轮椅自主移动问题多基于自主导航机器人的研究,早期大都基于商用电动轮椅进行改装[22-24],而自主导航功能基于机器人的感知、定位、规划与运动控制等技术[25],其中定位不仅是智能轮椅实现自主移动的核心与前提,也是实现与床体对接的基础。
移动机器人的定位技术可分为局部定位与全局定位两种[26]。局部定位是指机器人通过自身航迹推算或通过特征匹配获取自身与环境中目标物的相对位姿,常见方法有模板匹配及局部特征提取等。全局定位技术则指对机器人在运动环境的定位,如室外的全局定位实现常借助全球定位系统GPS,而室内常见的定位技术有超宽带(ultra wideband,UWB)定位技术[27]、红外室内定位技术、基于视觉的定位技术和激光雷达室内定位技术等。无论使用哪种技术,研究人员及市场在定位精度、抗环境干扰能力、成本问题等方面,根据应用场景有所侧重[28],以获取最佳方案。基于护理床应用场景,常见自动对接技术有基于红外与超声波对接、激光雷达定位对接和基于视觉定位对接。
4.2.1红外与超声波定位对接 红外定位主要有两种实现方法,第一种是红外织网,通过多对发射器和接收器制成的红外线网络直接对运动目标进行定位;另一种是通过安装多个红外传感器测量信号源的距离和角度,从而计算出定位对象所在位置。单独使用红外定位成本颇高,此外,红外在室内易被障碍物遮挡,且易受热源灯光等干扰导致定位效果不佳。超声波定位的实现基于超声波测距,常见的方法有单向测距法和反射测距法,后者在室内物体定位中最为常见,即发射超声波并接收回波,根据回波与发射波的延时时差计算出目标物距离。超声波传感器的检测结果受障碍物表面材料反射率的影响,当障碍物表面材料不可反射或反射效果不理想时,可能会导致定位偏差。因此,在实际应用中多采用红外与超声波融合定位方式,其测距原理见图8。
图8 红外超声测距原理图Fig.8 Schematic diagram of infrared ultrasonic ranging
图8中,接收端根据红外接收信号、超声波接受信号测量得时差为t2,考虑红外接收端本身延时为t1,再考虑超声波接收电路本身延时t0,实际超声波在空气介质传播的时间T为:
T=t-t0=t1+t2-t0
(1)
再考虑接收端采样频率有限造成的量化误差,可以把超声波在空气介质传播的时间进一步估算为:
(2)
则距离D估算为:
(3)
其中fT为计数器技术频率。
该技术应用到移动设备(如轮椅)上时,安装于轮椅的信号发射端同时发出红外与超声波信号,由于红外信号传播速度远大于超声波,可以基本忽略红外信号的延时,床体接收端的多路接收电路一旦收到红外信号,立即进行超声波定时计数,直到接收到各路超声波信号立即停止计数,并将多路采集数据通过相关的定位算法,实现对床体的精确定位。由于患者所处室内环境动态性较低,室内面积有限且温度变化不大,在合理控制环境因素的前提下,红外超声波融合定位技术的优势得到明显展现。
同时定位与地图共建(simultaneous localization and mapping,SLAM)一直是移动机器人研究领域的热门技术[29],它通过从外部传感器接收感知信息来更新移动机器人的定位及周边环境信息[30]。目前已有很多感知工具、方法和相关算法[31],其中激光雷达和视觉传感器在SLAM中最为常用[32]。
4.2.2激光雷达定位对接 相对视觉传感器,激光雷达能够提供更加鲁棒、准确和噪声水平稳定的测量信息,且对光照条件相对不敏感。目前激光雷达的测量原理主要有脉冲法、相干法和三角法,前两种因其对硬件水平要求高,测量精度高,多用于高精尖领域,如国防军事,而三角法成本低且精度满足大部分商用及民用需求,故广泛应用于民用场景。基于三角法原理的激光雷达测量原理见图9。
按入射光束与被测物体表面法线的角度关系可以分为直角式和斜射式,激光发射器以一定的角度发射激光照射被测目标,激光在目标表面发生反(散)射后利用透镜对反射激光汇聚成像,光斑成像在感光耦合组件(charge-coupled device,CCD)位置传感器上。以斜射式为例,AB为激光发射器中心与CCD中心的距离,BC为透镜焦距f,C′为被测目标距离基线无穷远处时反射光线在光敏单元上成像的极限位置,C′D′为光斑在光敏单元上偏离极限位置的位移,记为x′,当系统光路确定时,α、AB与f均为已知参数,由几何关系知△ABO1′~△C′D′B,可知:
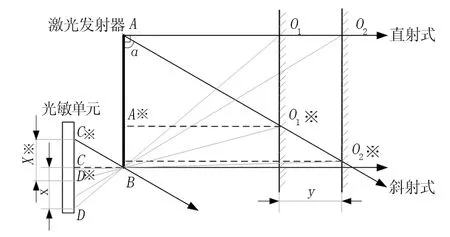
图9 激光雷达三角法光路图
(4)
(5)
(6)
可将CCD位置传感器的轴与AB平行假设为坐标y轴,则通过算法得到的激光点像素坐标为(M,N),从而得到x′的值为:
x′=CellSize·M+DeviationValue
(7)
其中CellSize是光敏单元上单个像素的尺寸,DeviationValue是通过像素点计算的投影距离和实际距离x′的偏差值。
当被测目标与AB产生相对位移时,x变为x1′,则可得被测目标运动距离y为:
(8)
激光雷达采集的数据信息传输至搭载机器人操作系统( robot operating system,ROS)的主机,并进行相应滤波处理及算法优化,从而对移动设备进行精准的位姿测算。因此,对于主机的计算能力有一定的要求。以轮椅为例,激光雷达一般安装于轮椅前端距离地面5~10cm处,通过激光雷达扫描室内环境和床体轮廓完成对室内地图的构建及床体标定,当轮椅移动至可对接范围时,激光雷达检测到床体轮廓信息,与创建的床体地图进行匹配完成初始定位。而后通过ROS导航系统将轮椅导航至对接目标处,开始缓慢对接。在运动过程中轮椅部分与床体部分会存在一定的角度差,而导航系统会实时计算出当前二者位姿,并不断调整姿态,使得轮椅与床体保持相对水平固定,直至完全进去床体,完成自动对接。激光雷达自主导航与对接广泛应用于自动充电,自主泊车等领域,家用扫地机器人则是最典型的应用实例,其对接精度极大依赖于传感器的参数。
4.2.3视觉定位对接 随着视觉传感器的不断发展,基于视觉的定位方法近年来得到了深入研究,主要分为三种方式:基于特征匹配的方法、基于场景坐标回归的方法和基于全局位姿回归的方法。
在室内有限空间内往往采用较为简便的图像匹配算法,图像匹配是指通过提取图像中比较显著的点构成数据信息,然后与其他图像的信息进行对比,从而找到多幅图像间的相关性。目前,图像配准技术搭配相应优化算法在各领域的应用已较为成熟[33]。而在图像匹配方法中,基于特征点的方法因其在尺度变换或环境因素变化时抗干扰能力强而最为流行。研究者通过设计具有明显特征的人工标志或QR码进行简化定位工作,再通过图像处理技术进行特征提取或是模板匹配,从而完成对机器人位姿获取[34]。
Zou等[35]提出基于中央嵌入式的护理床自动对接方式[36],见图10。采用安装于轮椅上方的视觉传感器,通过传感器提取床体框架的U形特征及直线与角点数据并进行滤波融合,获取轮椅及床体的相对位姿信息。图11同样采用中央嵌入式,而对接方式则采用预置人工标志的方式,通过预设在床体底部的T型人工标志,获取更加明确的直线与角点数据,同样能够获取轮椅与床体的相对位姿信息,
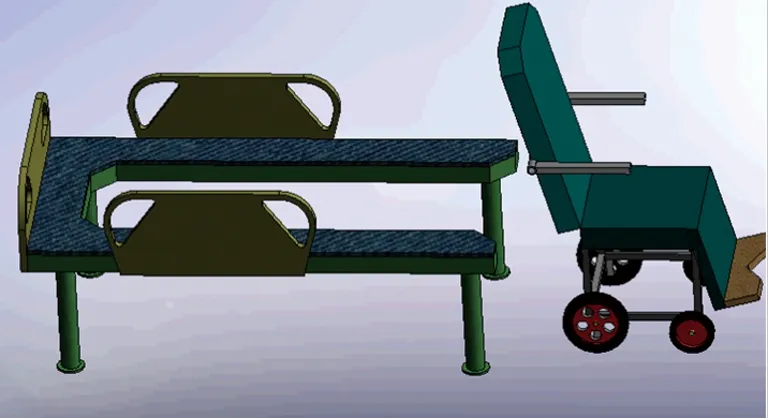
图10 U形可对接护理床 Fig.10 U-shaped docking nursing bed
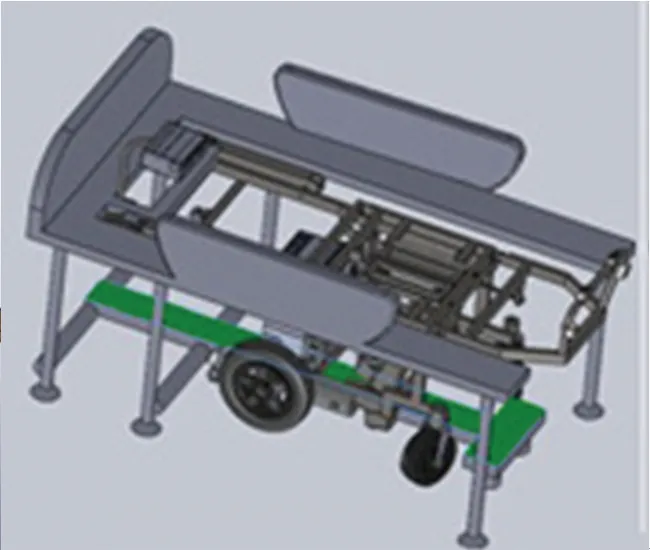
图11 T形标志可对接护理床
从而完成对接[37]。但基于视觉的对接方法对环境光线要求较高,环境因素影响较大。
5 总结与展望
多功能护理床的功能研发随着硬件水平及软件技术的发展而趋于多样化。本文基于护理床技术类型的发展对多姿态变换技术、二便护理技术作简单介绍并阐述其原理,分析了目前自主移动机器人技术在护理床端的应用,各项技术方案优缺点见表2。
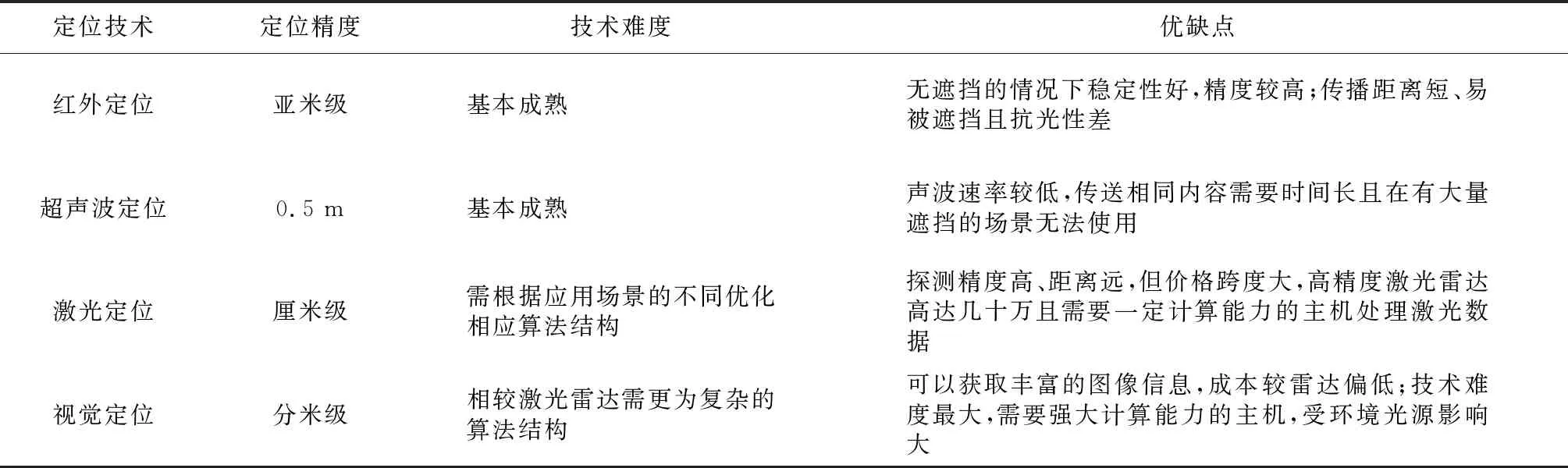
表2 定位技术对比
由上可知,单一技术无法很好地满足应用需求,多技术融合如红外超声波技术既可降低功耗,又避免了超声波传输距离有限的问题,实现单一技术相互交叉、优势互补。国内外研究人员也在大力开发基于激光技术与视觉技术融合定位,可有效解决测算范围、测算精度及成本问题。
智能护理是全球产业竞争的焦点领域,而全自动智能辅助更是该领域的技术核心。护理床功能研发已不仅仅围绕解决患者日常生活需求,各类传感器的融合使得护理床具备生理参数检测功能,如体温、血压、血氧等,此外,搭载在护理床上的影音设备为患者带来娱乐,可有效缓解卧床心理压力。目前,我国大多数医院和养老院仍在使用造价较低、功能单一的护理床,主要因为国内相关产业基础薄弱,产业链体不完善,产业品牌和竞争力弱,虽然研发水平赶超国际前沿,但在产品综合性能和可靠性上仍存在差距。国内智能护理床发展应遵循当前智能设备多技术融合趋势,实现真正意义上的智能护理、智慧养老。