临近空间高超声速目标跟踪制导雷达搜索空域确定模型*
2022-01-26李志淮曲智国陆万宏
李志淮,曲智国,韩 伟,朱 刚,陆万宏
(1.空军预警学院雷达士官学校,武汉 430345;2.空军预警学院三系,武汉 430019)
0 引言
临近空间高超声速目标是一类可以在临近空间(高度20 km~100 km)高速飞行、执行作战任务的新型战略威慑和战术运用武器平台。随着临近空间高超声速武器的列装[1],急需加快对该类目标预警探测研究和部署。跟踪制导雷达负责对该类目标的精确跟踪、识别、保障拦截引导及拦截评估等,是临近空间目标防御系统的重要组成部分。在防御系统中,其他传感器提供的目标观测信息对目标运动轨迹进行预测,并引导跟踪制导雷达搜索捕获目标,因此,可以说跟踪制导雷达的搜索空域划分问题就是引导信息下的监视空域确定问题。对于临近空间高超声速目标,一方面来袭目标的杀伤力巨大,要求跟踪制导雷达具有很高的搜索截获概率;另一方面,目标RCS 小,需要增加波束驻留时间,要求搜索区域要尽可能地小,从而提高搜索数据率。因此,如何在保证目标覆盖概率的同时,减小搜索空域,是一个很重要、很有实际意义的课题。最后,目标的高速运动,需要实时动态更新搜索空域。
确定和划分监视空域的主要依据是雷达目标的运动特性,文献[2-5]对弹道导弹防御雷达搜索空域划分进行了研究,但是这些研究都是针对弹道导弹目标,并不能完全适用于临近空间高超声速目标,且在进行动态更新时,并没有考虑目标高速运动对搜索空域大小带来的影响。
如何确定搜索空域,既能保证目标落入概率和搜索数据率,又能消除目标高速运动带来的影响呢?本文以此为切入点,进行临近空间高超声速目标跟踪制导雷达搜索空域模型确定方法的研究。
1 修正球坐标系
虽然相控阵雷达的波位编排是在正弦坐标系下进行的[6],但雷达一般在其他坐标系确定搜索区域,而后转换到正弦坐标系。一般用半功率波束宽度来表示单波束照射空域的大小,且修正球坐标系与正弦坐标系转换简单,因此,在修正球坐标系下描述搜索空域具有很强的实用意义。
用修正球坐标系表示雷达搜索空域,雷达站所在位置为坐标系的原点,如图1 所示,α 为方位角,β为俯仰角。修正球坐标系图中阴影区为引导搜索区域,深色区S 为雷达所张成立体角在单位球上的截面面积。由图1 可知,雷达的搜索空域在修正球坐标系下,可用雷达搜索立体角在单位球上的截面面积S 表示。
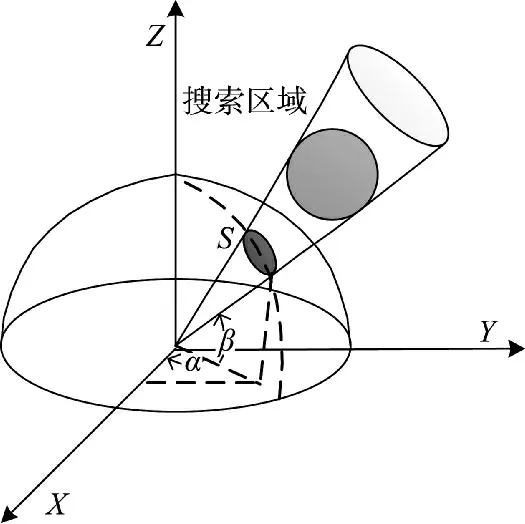
图1 修正球坐标系
由文献[7]可得,引导信息的误差通常为高斯正态分布,可用高斯球模型来描述。此外,雷达搜索立体角在单位球上的截面S 为圆,也即修正球坐标系下,雷达搜索空域面积为圆的面积。
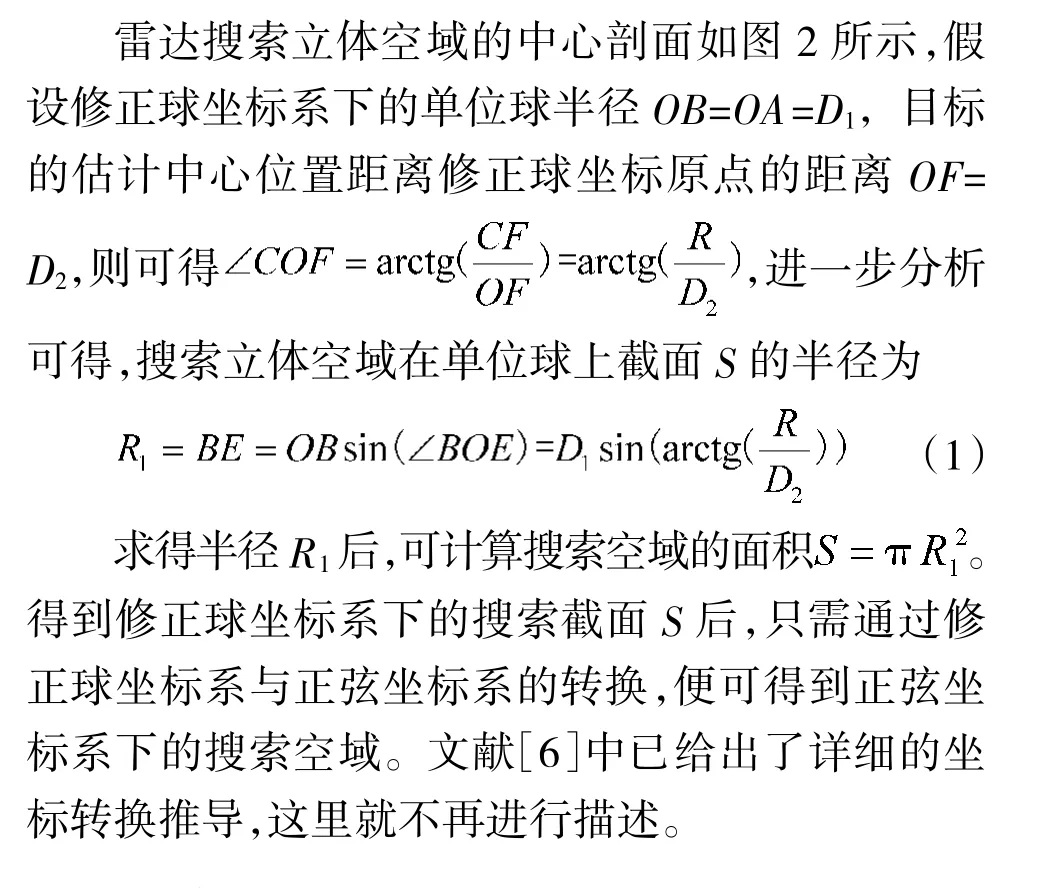
2 静态搜索空域模型


图2 搜索空域剖面图
3 搜索空域动态匹配模型
由于目标的高超声速运动,引导信息下的搜索区域不但会随着目标的运动而移动,且空域大小也会因目标的运动而变化。这就要求根据目标的运动情况,实时动态更新搜索空域,才能实现对目标的连续搜索捕获。
3.1 目标运动对搜索空域的影响
由于临近空间高超声速目标的速度快,导致防御时间窗十分有限,对跟踪制导雷达尽快截获目标提出了要求,也因此对雷达作用距离的要求较大。考虑地球曲率的影响,地基雷达最大作用距离为
式中,nt为搜索的波位数,ns为单波位的积累脉冲数。假设单波位的积累脉冲数为10,则50 个波位的搜索帧周期为3.35 s。在搜索帧周期内,目标的高超声速运动,使得整个静态划分的搜索空域将偏移初始的位置,且搜索空域的大小也将发生改变,如图3所示,如仍按静态划分的空域进行搜索,目标落入搜索空域的概率将大幅下降,导致截获概率大幅降低。
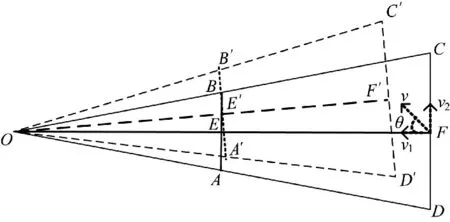
图3 目标运动对搜索空域的影响示意图
由图3 可知,可以把目标的速度v 分解为v1和v2,其中,v1为径向运动速度,v2为侧向横移运动速度。目标的径向运动和侧向横移运动,将分别对搜索空域造成以下两方面的影响:
一方面,目标的径向运动将改变雷达搜索空域的大小。当v1>0 时,目标的估计中心位置距离修正球坐标原点的距离越来越小,鉴于引导目标误差区域大小不变,即C'F'=CF,修正球坐标系下的单位球半径不变,即OB'=OB,则由几何关系可知,B'E'=BE,也即搜索立体空域在单位球上截面S 的半径增大;另一方面,目标的侧向横移运动将使搜索空域偏离原来的位置。当v2>0 时,搜索空域圆的中心位置将由E 点移到E'点。
3.2 搜索空域动态匹配
由前面分析可知,目标的运动主要会造成搜索空域大小及搜索空域位置的变化。而进行搜索空域动态匹配的前提是,得到实时的搜索空域大小和位置信息。
由图3 可知,计算搜索空域大小的变化信息关键是实时得到截面S、半径R1的变化大小,而计算搜索空域位置的变化信息则是实时得到∠E'OE 的大小信息。此外,由式(1)可知,得到实时的D2大小是求解R1的关键。
为了方便描述,假设γ=∠E'OE,目标初始速度v与雷达阵面法线的夹角为θ0,则由图3 可得,修正球坐标系下,D2和γ 的计算方程为,
由式(4)求得D2后,代入式(1)可得截面半径R1的大小,进而可得修正球坐标系下的搜索空域S的面积。得到修正坐标系下的搜索空域面积后,就可把S 投影到正弦坐标系下,从而得到正弦坐标系下新的搜索空域大小。同理,由式(4)求得γ 值后,就可得到修正球坐标系下搜索空域位移信息,并将其投影到正弦坐标系下,可得正弦坐标系下新的搜索空域位置。
由前面分析可知,不管是搜索空域大小还是搜索空域位置的变化都与时间t 有关,因此在进行动态更新搜索空域时,选择合适的更新时间显得尤为重要。
在搜索空域位置变化的更新时间选择上,一般情况下,更新周期Tu应为当前搜索空域的搜索帧周期Ts的整数倍。但对于搜索帧周期较大的情况,在雷达对空域的搜索时间内,由于目标的高速运动,目标极可能飞越了若干个波位,即搜索时间靠后的波位,可能已经偏离静态划分时的区域,这将造成搜索截获概率的下降。特别是对于多脉冲相干积累方式的小目标跟踪制导雷达而言,这种问题尤为严重。因此,当单波位驻留时间比较大时,可以取雷达搜索空域的更新周期为单波位驻留时间的整数倍,即

此外,相控阵雷达天线波束指向的最小变化时间间隔为雷达的波束跃度,即在雷达搜索一波位后目标移动距离小于雷达波束跃度时,下一波位应该与事先编排好的波位排列图相同。假设正弦坐标系下雷达的波束跃度为d,目标初始速度v 的侧向横移速度v2投影到正弦坐标系下的速度为v2',则考虑搜索空域位置变化时的更新时间为

此外,考虑搜索空域大小变化的限制,这个变化最小为一个搜索波位。也就是说,如果存在这样的情况,即在雷达搜索一帧后搜索空域的变化小于一个搜索波位的大小,则下一搜索空域的大小应该与前一搜索空域大小一样,不需要进行搜索空域大小更新。假设正弦坐标系下雷达搜索单波位面积为s,考虑一定运动时间下的截面S 投影到正弦坐标系下的面积为S1,初始截面S 投影到正弦坐标系下的面积为S0,则考虑搜索空域大小变化的更新时间为,

4 仿真分析
4.1 目标运动对搜索空域的影响仿真


图4 作战位势图
需要说明的是,本文仿真中涉及到的距离都是无量纲的归一化值。则由式(4)可得,修正球坐标系下,搜索空域的截面S 面积和移动角随时间变化的仿真结果如图5 所示。

图5 搜索空域的截面面积和移动角随时间的变化曲线
由图5 可得,由于存在目标的运动,修正球坐标系下,搜索空域大小及移动角随着搜索时间的增加而增大。也可以说,如果不进行相应的搜索空域动态更新,相当于搜索空域实际覆盖范围的减小,雷达对目标的截获概率也会随时间的增加而减小。
4.2 目标径向运动条件下仿真
考虑雷达搜索波位的编排样式为交错波位编排,如图6 所示,此时的空域覆盖率可达0.907。

图6 交错波位编排样式
假设目标以速度0.005/s 匀速径向运动,为了仿真简便,取正弦坐标系下搜索波束的半功率宽度对应圆的半径归一化值为0.01,雷达搜索帧周期为1 s,初始时刻雷达截面S 在正弦坐标系下的投影面积S0=0.016,其他参数假设同上。有无采用本文动态匹配更新方法下的目标落入概率随时间的变化曲线如图7 所示。

图7 目标落入概率随时间的变化曲线
由图7 可知,考虑目标的径向运动后,如果不进行搜索空域大小的动态匹配,目标落入概率将随着搜索时间的增加而减小;而采用本文的动态匹配方法后,目标落入概率随搜索时间的变化始终能保持在比较高的水平。需要说明的是,这里的目标落入概率是实时的落入概率,而不是累积的落入概率。此外,从图中还可以看出,采用本文方法的目标落入概率仍然存在一定的波动现象,这是以搜索帧周期作为动态匹配更新时间造成的。
4.3 目标侧向横移运动条件下仿真
假设正弦坐标系下目标以速度0.005/s 做匀速侧向横移运动,单波位驻留时间为60 ms,雷达搜索波位数为50,则搜索帧周期为3 s。取正弦坐标系下,目标引导误差为高斯分布模型,均方差为0.04,以倍的均方差作为搜索半径,则不考虑目标运动时的目标落入概率为0.9。考虑雷达波束跃度为半功率波束宽度的0.1 倍,其他参数假设同上。则采用本文方法下的目标落入概率随时间的变化曲线如图8 所示。为了方便比较,仿真结果还给出了文献[4]中的方法。

图8 目标落入概率随时间的变化曲线
从图8 中可以看出,考虑目标侧向横移运动时,采用本文给出的搜索空域更新方法,可以使实时的目标落入搜索空域的概率随时间变化稳定于一个较高的数值上,而文献[4]的方法由于采用的更新周期较大,落入概率的波动性比较大。同图7一样,这里的目标落入概率是实时的。
需要说明两点:一是本文为简化分析,假设雷达资源全部用于目标搜索,而实际跟踪制导雷达只有少量资源用于搜索,即搜索帧周期会大大增加,使得静态划分的搜索空域偏移严重,更加体现了本文所提动态匹配的必要性;二是为了便于对比分析,仿真时考虑的是10 s 以上的长时间搜索,而跟踪制导雷达实际工作中,当连续搜索几个周期没有发现目标后,会自动撤销该搜索空域,即实际中用于连续搜索的时间不会很长,但实际中搜索帧周期会更长,也就是说完成几个周期的搜索时间也是需要10 s 以上的。综上所述,本文方法对于实际跟踪制导雷达是适用的。
5 结论
临近空间高超声速目标探测中,跟踪制导雷达搜索空域划分和更新的合理与否,直接影响到雷达对目标的截获性能。本文针对临近空间目标高超声速运动的特殊情况,在修正球坐标系下,对跟踪制导雷达的搜索空域静态模型和动态匹配模型进行研究。从仿真结果来看,本文方法确保了雷达在目标高速运动下,实现对目标覆盖率达到0.9 以上,从而提高了雷达的搜索性能。在搜索空域模型确定下,如何确定目标高速运动下的最优波位编排模型是下一步需要研究的内容。
