基于线阵CCD的无人驾驶汽车路径跟踪导航系统
2022-01-26江苏谭婷
◆文/江苏 谭婷
随着生活水平的大幅度提升,汽车已经成为最为常见的交通工具,再加上传感技术、网络技术以及计算机等技术发展水平的不断提高,汽车领域逐步朝着信息化以及智能化方向发展,尤其是以环境感知技术为基础的辅助驾驶技术已经取得了一定的研究成果,所以具有高度智能化特征的无人驾驶汽车已经成为汽车领域的未来发展趋势。无人驾驶汽车可以利用车辆自带的传感器获取道路、车辆位置和障碍物信息,并利用相关技术对汽车的转向与速度进行精准控制,保证车辆行驶安全,该技术令道路交通系统从传统的“人-车-路”系统变为“车-路”系统,这样不仅能够提升驾驶智能化程度,还可以最大程度避免因交通事故而产生的生命财产损失。由于无人驾驶汽车路径跟踪导航是无人驾驶领域最为重要的研究课题,也是保证汽车安全行驶的必要条件,因此研究无人驾驶汽车路径跟踪导航具有重要的研究意义。为了提升无人驾驶汽车路径跟踪准确率与用户满意度,降低导航路径规划所用时间,本文设计了一种新的基于线阵CCD的无人驾驶汽车路径跟踪导航系统。
一、无人驾驶汽车路径跟踪导航系统
1.硬件设计
(1)信息采集模块设计
为提升数据采集效率与质量,本文主要利用线阵CCD进行信息采集模块设计,选用的是东芝公司生产的TCD2252D线阵CCD,结合超声波传感器、电子罗盘、加速度传感器、霍尔传感器组完成信息采集模块设计。由于CCD图像传感器是信息采集模块最为重要的组成部分,因此需要对这种传感器进行重点研究。
信息采集模块在功能上具有相对独立性,为提升其可扩展性以便后续对该模块进行优化升级,所以本文引入EMP7064S L44-10进行时序发生设计,其时序仿真图如图1所示。
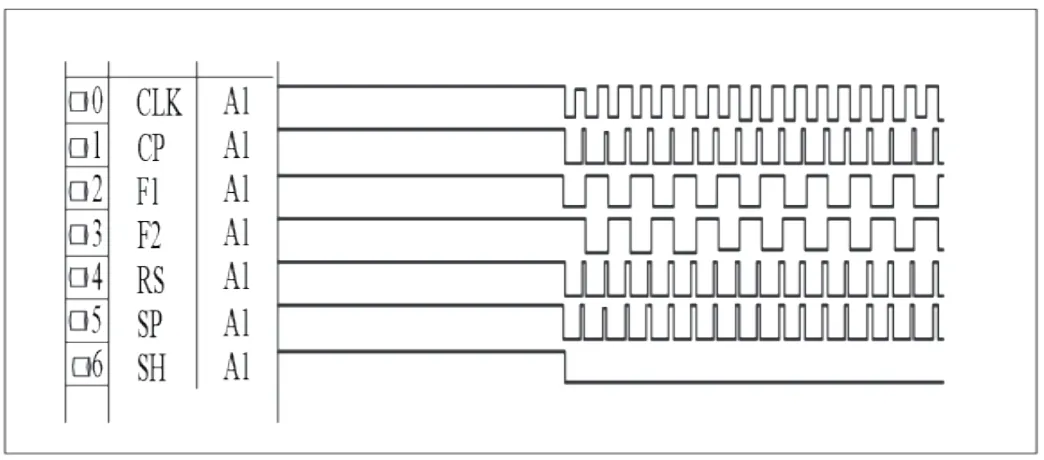
图1 时序仿真图
为了保证信息采集模块的信号具有稳定性,因此需要保证该模块具有非常高的采样与数据存储效率,因此本文选择CLK频率为10MHz的采样通道。具体如图2所示。
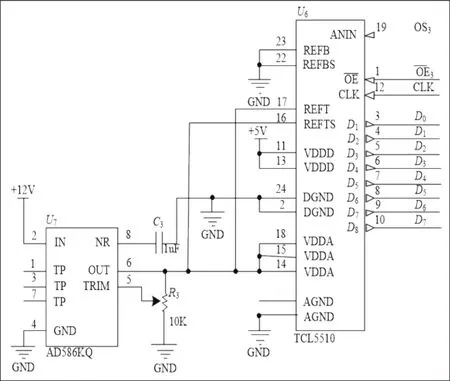
图2 信息采样通道
(2)多源信息集成模块设计
将安装在无人驾驶汽车中的多个传感器信息进行集成处理,本文系统主要利用超声波传感器检测无人驾驶汽车行驶路径上的障碍物位置。本文所选择的超声波传感器的纵向探测范围是50~500cm,横向探测范围大于无人驾驶汽车的宽度,探测区域具体如图3所示。
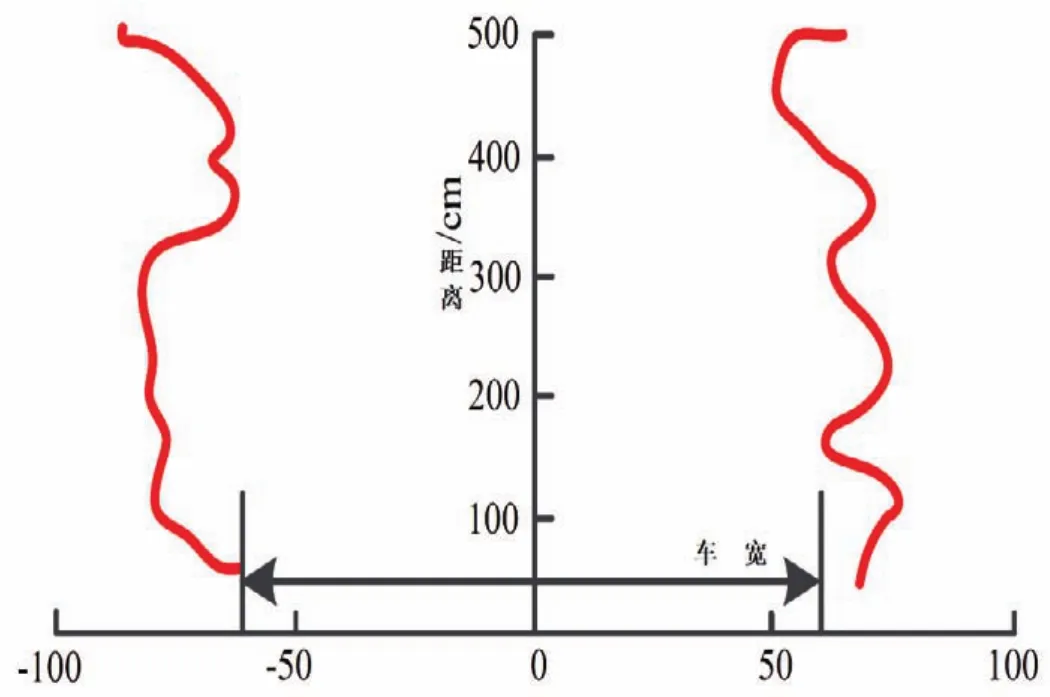
图3 超声波传感器探测区域
在多个传感器的支持下,本文所设计的多源信息集成模块将STM32F107作为主控制器,通过混合型信息融合结构进行多个传感器的信息集成。为提升多源信息集成模块的数据处理效率,将CCD图像传感器采集到的图像信息通过DM642处理后,在将处理好的图像信息发送至主控制器,其他传感器则通过I2C总线将信息发送至主控制器,信息集成模块的具体结构如图4所示。
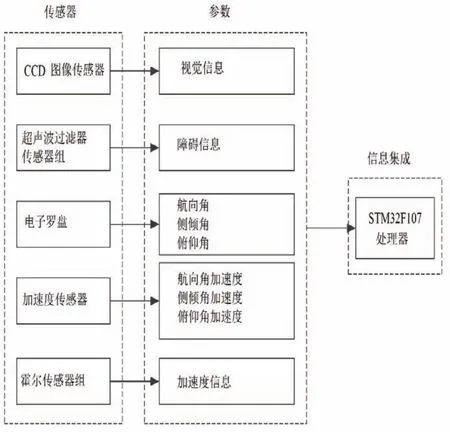
图4 信息集成模块结构
(3)汽车路径跟踪模块设计
汽车路径跟踪模块主要由无线传感网、基站、服务器、客户端组成。根据汽车无线传感网络性质的不同将该网络节点分为车载节点与检测节点。其中,车载节点主要安装在无人驾驶汽车上,利用该节点实现多方通信,该节点可以周期性地向外发送车辆信息,以便检测节点对车辆位置信息进行检测。检测节点主要布置在公路两侧,因此通过检测节点能够构成分布式检测网络,在检测到车载节点发送至系统中的信息后,利用信息集成模块对数据进行预处理,将处理好的信息转发给基站,基站会将接受到的信息发送至系统。而服务器从系统中获取无人驾驶汽车的基本行驶信息,并将数据存储至系统的存储器内,以期为后续的查询服务提供数据支持。而客户端主要通过无线或是有线网络与服务器建立连接,以便进行无人驾驶车辆信息查询以及车辆运行轨迹跟踪等。汽车路径跟踪模块具体执行过程如图5所示。
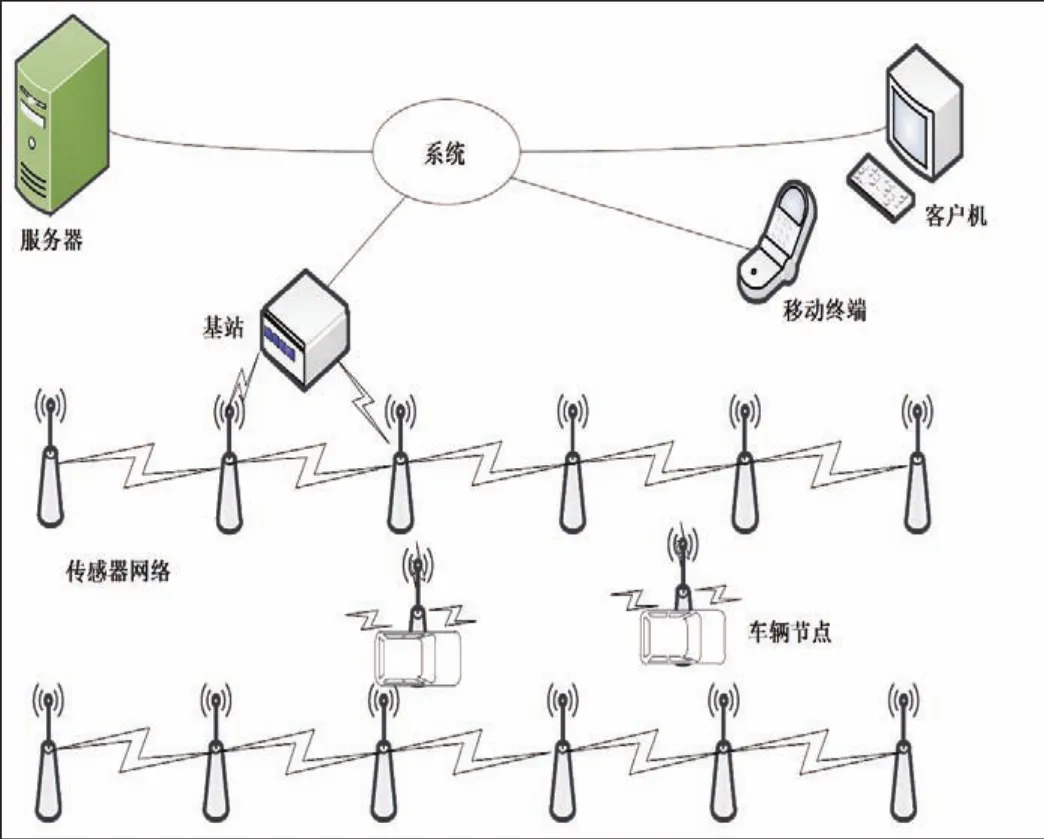
图5 汽车路径跟踪模块
(4)汽车导航模块设计
汽车导航模块是无人驾驶汽车路径跟踪导航系统最为重要的模块,因此需要对该模块进行重点设计,因此该模块具体包括导航计算机、GPS-OEM接收板、显示器、触摸屏、存储器等。其具体组成如图6所示。

图6 汽车导航模块组成
下面需要对汽车导航模块的重要组成部分进行重点介绍:
①GPS接收板:利用GPS接收板接受卫星导航信息以及多源传感器信息,利用MCS-51单片机对所接收到的信息进行进一步处理。当系统判断GPS接收板所接收到的信息为无效信息的情况下,此时需要将信息集成模块输出的信息作为导航信息,以提升汽车行驶路径导航的有效性。
②导航计算机:本文主要选择了PC/104型号的导航计算机,原因在于该设备具有能耗低、体积小以及抗干扰能力较强等多种优势,再加上其结构具有稳定性,非常适用于汽车导航模块[15]。
③GPS-OEM板:本文将复合12通道GPS接收机作为GPS-OEM板,原因在于该设备具有体积小、质量低以及功耗低、操作简单等多种优势,可以实现多源信号的快速捕捉的同时降低系统的计算负荷。
④存储器:本文在进行无人驾驶汽车路径跟踪导航系统设计过程中,稳定性是主要考虑的因素,因此在设计存储器过程中,本文利用多级缓存技术,即操作系统和导航软件存于硬盘,硬盘上设置CD-ROM缓存区,实现数据分区存储,提升系统的稳定性与可靠性。
⑤人机接口主要由显示器与触摸屏组成,由于在无人驾驶汽车路径跟踪导航系统设计过程中,其性能要求为高清晰以及多源信息显示,所以本文主要将TFT-LCD显示器作为输出设备。为了提升操作的智能性,需要将触摸屏作为输入设备,以便相关人员对无人驾驶车辆输入控制指令,提升系统的工作效率。
2.系统软件设计
在系统硬件设计的基础上进行无人驾驶汽车路径跟踪导航系统软件设计。将透镜放大倍数设为,则被测物体的尺寸设为,CCD图像尺寸为,被测物体阴影像的两个边界所对应的基数脉冲值分别用与表示,表示脉冲当量,存在以下关系式:

由上式可知,的值越小或的值越大,线阵CCD图像传感器的测量精度越高。
在实际中会存在被测物体与线阵CCD图像传感器像敏元素排列方向不一致的问题,此时会存在一个夹角。假设、、、分别表示R、B线上被测物体阴影像左右两个边沿所对应的计数脉冲值,所以路径横截面均值的具体计算公式如下:

则在水平方向上,R行的与B行夹角可以用下述公式计算得出:
则无人驾驶车辆与行驶方向的夹角可以用下述公式计算得出:
则无人驾驶车辆行驶路径宽度的计算公式如下:

本文主要是将定时器作为多源传感信号捕捉的时基,此时定时器的计数值分别用、、表示,则行驶轨迹线中心的计数值可以用下述公式计算得出:

在实际中,一帧图像信号的中心则表示线阵CDD芯片的中心,则该中心对应的计数值可以用下述公式表示:
上述公式中,表示线阵CCD图像帧数。当的情况下,此时说明CCD中心偏右;当的情况下,此时说明CCD中心偏左。因此在无人驾驶汽车路径跟踪导航系统设计过程中需要根据该原理对汽车的行使偏差进行实时调整,使无人驾驶汽车车身始终与路边界保持平行,且可以一直在道路中间行驶,实现无人驾驶汽车路径跟踪导航。
二、实验设计
1.实验方案
为了检验基于线阵CCD的无人驾驶汽车路径跟踪导航系统的实际应用效果,需要进行仿真实验。为了使实验结果更加真实可行,此次实验需要在统一的实验环境中进行。其中,实验环境设置如表1所示。

表1 仿真实验环境
在上述实验环境的支持下,将某一大型无人驾驶汽车生产企业后台数据作为实验样本数据,并对实验数据进行预处理,保证这些实验数据可以顺利输入仿真实验软件。
将目前市场上所设计的基于FPGA的汽车路径跟踪导航系统、基于Android的汽车路径跟踪导航系统以及本文所设计的基于线阵CCD的无人驾驶汽车路径跟踪导航系统作为实验系统,以检验不同系统的应用性能。通过比较不同系统的跟踪准确率、导航路径规划用时以及用户满意度作为实验评价指标,以检验不同系统的应用性能。
2.实验结果分析
为了检验系统的应用效果,需要检验不同系统的无人驾驶汽车路径跟踪准确率,比较结果如表2所示。
由表2中的数据可知,基于FPGA的汽车路径跟踪导航系统的无人驾驶汽车路径跟踪准确率最大值为79.7%,基于Android的汽车路径跟踪导航系统的无人驾驶汽车路径跟踪准确率最大值为78.2%,本文所设计系统的无人驾驶汽车路径跟踪准确率最大值为98.7%,是三种系统中跟踪准确率最高的,说明这种系统的跟踪准确率更高,无人驾驶汽车路径跟踪结果更为精准。

表2 比较跟踪准确率(单位:%)
以上述实验为基础,为进一步比较不同系统的应用性能,进行导航路径规划用时比较,结果如表3所示。

表3 导航路径规划用时(单位:s)
由表3中的数据可知,在100次实验中基于FPGA的汽车路径跟踪导航系统的无人驾驶汽车导航路径规划用时平均值为2.71s,基于Android的汽车路径跟踪导航系统的无人驾驶汽车导航路径规划用时平均值为4.05s,本文所设计系统的无人驾驶汽车导航路径规划用时平均值为0.35s,是三种系统中导航路径规划用时最短的,说明该方法规划出无人驾驶汽车行驶路径的所用时间更短,效率更高。
令用户对三种无人驾驶汽车路径跟踪导航系统进行评分,满分为100分,将参与评分的用户分为10组,将每组平均分作为该组的最终评价结果,具体比较结果如图7所示。
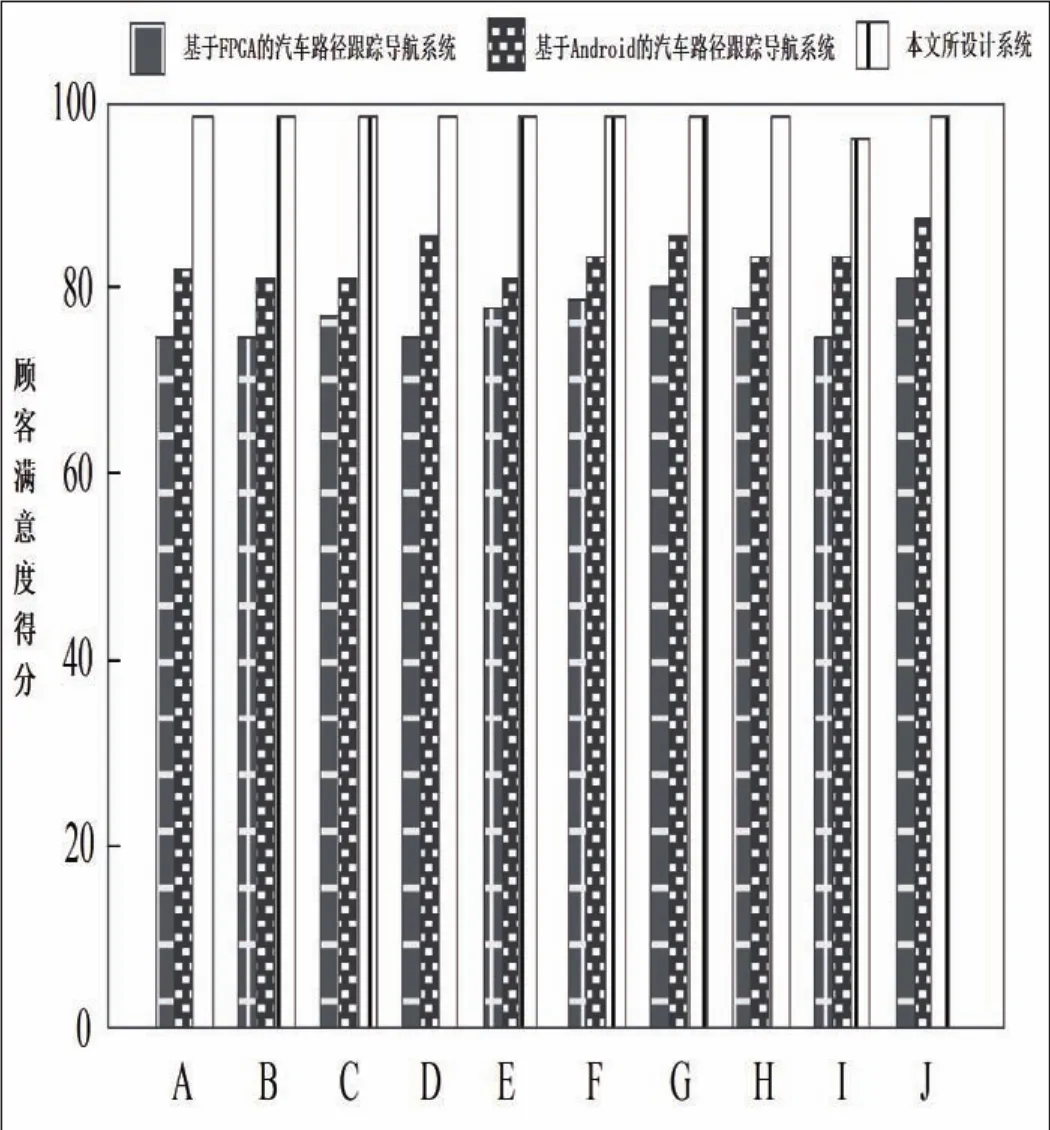
图7 用户满意度比较结果
综合分析图7中的数据可知,基于FPGA的汽车路径跟踪导航系统的用户满意度评分在74~83之间,基于Android的汽车路径跟踪导航系统的用户满意度评分在80~88之间,本文所设计系统的用户满意度评分始终保持在97以上,说明这种系统的用户满意度更高,实际应用效果更好。
三、结论
到目前为止,信息技术已经在社会各个领域实现了广泛应用,尤其是随着互联网以及人工智能等技术的快速发展,促使汽车领域不断朝着智能化方向发展,因此无人驾驶汽车的诞生已是大势所趋。无人驾驶汽车不但可以提升交通运行效率,保证行车安全,还可以完成一些人们做不到的任务,因此无人驾驶汽车路径跟踪导航已经成为该领域的重点研究课题,所以本文设计了一种基于线阵CCD的无人驾驶汽车路径跟踪导航系统,主要通过对系统软硬件的分别设计实现跟踪导航系统研究。实验结果表明,该系统的无人驾驶汽车路径跟踪结果更为精准、汽车行驶路径规划时间更短以及用户满意度更高,可以更好地保证汽车自主稳定行驶,对于现代交通领域具有重要的研究意义。
