基于蚁群算法的移动自组网AODV 路由协议动态优化
2022-01-25刘之滨赵欣然
刘之滨,赵欣然
(1.国家电网公司华北分部,北京 100053;2.中国核电工程有限公司,北京 100840)
移动自组网是一种具有多结构的无线网络,可以在没有基础设备的情况下正常运行,常常应用在抢险救灾、地势复杂等环境中,其网络的散布点较为均匀,但是会受到通信线路的信号数据限制。需要具有稳定的协议改变通信线路动态信道,才能实现更高效率的移动自组网AODV 路由协议运行状态。平面距离向量在一定自组网中可以按照路由协议进行规定的数据传输,收集网络节点中的缓存数据。当路由协议产生异常时,故障节点将依照某些算法建立通信环境。文献[1]中提出一种树形移动自组网SODV 路由协议,实现了数据节点与数据节点之间的跳数传输,避免了通信线路干扰,但是在节点与节点之间数据感应的同时,需要大量的能量作为支撑,且传输后的节点不可再用。为此,该文提出移动自组网AODV 路由协议动态优化方法,从节点的数据获取到路由协议动态频率的阈值设定,再到最后的实验结果证明,蚁群算法在路由协议优化中具有优势,提升了数据包在协议中的动态交付率。
1 蚁群算法
蚁群算法主要通过一组蚂蚁在一定的空间中进行最优解探索,探索出的最短路径可以是蚁群算法在路由中的标准动态协议。蚁群开始探索要具备完整的起始网络节点,再应用概率模型决定蚂蚁在信道中的出发点,出发后每寻找到一个节点便会对数据进行收敛,收敛公式如下:
式中,t代表信息素,α代表算法在协议中的验证信息,该信息具有强化路径的作用,β代表每个节点中剩余的信息素,p(t)代表蚂蚁探索过程中向下一节点的探索概率。信息选取原则如图1 所示。
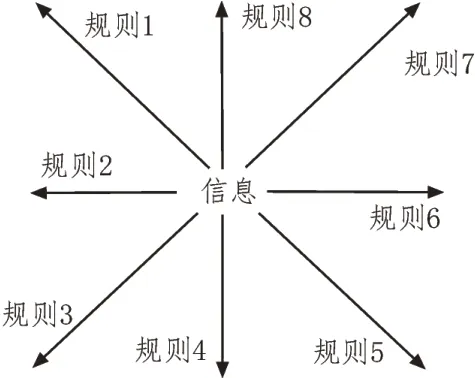
图1 信息选取原则
每只蚂蚁在进行路径探寻过程中均会利用目标节点设置自身的相关信息,达到目标节点对路径信息求解的作用,还可以实现路径数据的反向计算,获取信息素在路径中的衰减程度和信息素累积量[2]。蚂蚁对独立数据环境会留下更高质量的信息素,体现数据的重要程度,后续的蚁群将会在衰减程度较低的方向跟进,这种方法体现在局部最优解较为适合[3-4]。该文将蚁群算法中的实施界面更换为二维平面拓扑,方便数据节点的集合,还可以在平面中进行任意移动自组网的通信线路建立,每条线路均具有独立的延时、带宽等通信参数,方便蚂蚁算法在路由协议中的动态数据传输,并将信息素同时投入多条节点路径中[5-6]。
2 移动自组网AODV路由信息选取
蚁群算法在移动自组网AODV 路由中首先要进行路径信息的选择,建立路径信息选择规则,利用单元网格的形式设定目标路径信息的位置,防止大数据环境下的障碍数据干扰[7-8]。路由协议中的路径信息为数字格式,采用坐标手法对路径信息进行空间内标定与信息转换。采用的坐标法可以将路径信息内的节点位置建设在预期目标环境中,针对关键信息再次制定可以融入信息素的信息选取规则[9]。假设单元网格可以储存三维空间数据,则引入的二维空间数据要根据序号进行分类,如下所示为二维空间中一条路径信息在三维空间显示的内容:
式(2)中,l代表单元网格数量,x、y分别代表线路信息在单元网格中的横、纵坐标,a代表每个单元网格边长,b代表蚂蚁对路径信息的获取方向[10-11]。当单元网格中的路径信息较多时,还需要应用蚁群算法设置关键路径节点数据,设置方式如下所示:

式(3)中,λ代表两个相邻节点之间的信息素浓度,h代表信息素的启发因子,λ(s)代表信息浓度启发函数,h(s)代表信息素启发函数,R代表在单元网格空间内的全部信息选规则。综上所述,对移动自组网AODV 路由信息的选取,可以通过建立单元网格的方式,引入蚁群算法作为信息传输的选取方式,确保算法的后续计算具备稳定的数据环境。
3 设置路由频率动态移动规则
路由在完成数据选取后,第一时间将数据上传至蚁群算法结构中,在数据输送过程中会有节点障碍,需要在路由中设置避障规则,使目标节点与数据节点信道距离最短[12]。当数据从数据节点进入信道后,躲避的障碍数据有一定几率延长干扰信号、增加数据信道距离,因此在设置路由避障规则的同时要选择最近线路完成传输。路由避障示意图如图2所示。

图2 路由避障示意图
可以参考蚁群算法的避障路径实现数据传输线路的拓展,假设路由的初始频率为n,在数据信道中每次遇见障碍节点都会调节频率,且每次调节的频率不同,将第一次频率调节计为1,第二次频率调节计为2,以此类推,逐渐寻找信道中的最佳路径,后续跟进传输的路径默认选择已知的最佳调节频率。
不同频率的动态移动规则也对应着不同的数据传输路径,但是每条路径都是由蚂蚁开发的[13-14]。因此每条路径中的信息素在蚁群算法中均可以应用,相似的两条路径可以同时应用,扩大信息素,增加蚂蚁对传输数据的感知能力,使蚁群算法在路由动态协议中进行信息素浓度叠加,从而加强路由频率动态移动规则的规范性。设置路由频率动态移动规则总体不变,在蚁群算法控制下随时出现传输数据方向改变、路径转移等情况,因此需要设置稳定的频率规则。
4 移动自组网AODV路由协议动态优化
基于蚁群算法的移动自组网AODV 路由协议动态优化主要根据路由频率动态设置和移动规则进行路径规划。路由在进行数据通信传输过程中,会受到所在环境的干扰,干扰或障碍的存在位置具有不确定性。因此,需要利用蚁群算法对移动自组网AODV 路由协议动态进行路径规划和规则设置[15]。
将路由的出发点设为初始节点,确定目标节点的位置所在,路由向着目标节点方向出发,途中受到干扰或障碍会避开,形成符合当下环境的动态路径[16]。由于遇到障碍物会重新规划路径,新的路线绕开障碍物会延长数据通信的传输路程,因此也会使数据通信传输的时间延长。为了达到优化路径同时保障通信效率的目的,需要对障碍物躲避规则进行重新设定,对于不会对通信信号造成较大影响的障碍或干扰,设置为无需躲避问题,当通信路由遇到这一类的障碍时,不用再重新规划其他路线,尽可能缩减通信路径的距离。
将通信环境中的多个路径节点和障碍节点表现在蚁群算法中,路径节点数据整合为X=(x1,x2…xn),障碍节点表示为集合Y=(y1,y2…yn),将数据传输的最优路径和躲避障碍后的路径表达出来,a代表蚂蚁,D表示蚂蚁经过的路径线路,然后能够对理想最优路径和实际最优路径进行计算,分析出蚁群对不同障碍物的躲避情况:

式(4)中,q指蚁群对障碍物的识别参数,f表示对不同节点的识别函数,u、v是对不同节点坐标的识别结果,ε表示识别出的关键信息数量,σ表示参与路径识别规划的总节点信息数量。经过上述公式运算能够得到蚁群对该环境中障碍和路线的识别能力。得到识别能力具体数值,可以对蚁群的避障规则进行调整,增强蚁群对关键路径节点和重要障碍节点的信息素选取能力。
确定路由的初始节点,根据蚁群对所有节点的信息素识别能力,划分节点的蚁群吸引力等级,增强主要障碍物节点的吸引等级,同时增强绕开关键障碍节点的最近路径节点的吸引等级。调高路由对关键节点的识别敏感度,使最优路径范围缩小,路由对最优路径的识别感知能力随之增强,并且在关键节点信息素增强后,信息素浓度会在原来的基础上进行叠加,根据叠加后的信息素浓度数值计算各节点的浓度变化差值:

式(5)中,Δk是信息素浓度差值,η为信息素的发散系数,α为蚁群路径的误差值域,h为计算路径的总长度,Eij表示蚁群感知到的信息素叠加后的总值。根据上式计算所得信息对最优路径进行判定:
式(6)中,L表示所得路径结果,Lij为初始规划的参照路径。根据计算结果,若满足要求,则计算路径为最优路径,如果计算结果为0,则不是最优路径。蚂蚁最优路径示意图如图3 所示。
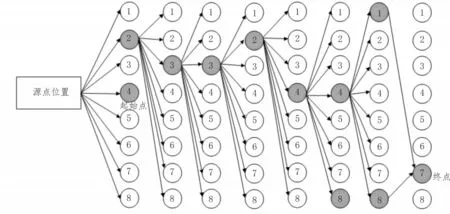
图3 蚂蚁最优路径示意图
以此能够得到更加科学合理的路由传输路径[17-18],实现了移动路由协议动态的优化。
5 实验研究
以计算机Matlab 程序为实验软件,对路由数据传输的节点识别效率、节点间平均传输时间、传输速率、路径失效率等指标进行了监测。仿真实验采用NS2 系统,在550 m×550 m 网络拓扑范围内随机分布20个节点,每个节点的最大移动速度为10 m/s。
传统路由通信在传输数据保持不变的情况下,路由从初始节点出发到范围内所有节点的速度受网络速度的快慢影响。不同传输路径的数据包传输节点间平均传输时间不变,路由的数据包发送率和接收率呈反比,网络速度不变,数据发送率提高,会造成区域内网络环境拥挤,占用网络资源,容易导致不必要的线路竞争或资源混乱,加剧网络节点的负荷,降低数据传输的速度和效率。数据平均时延实验结果如图4 所示。
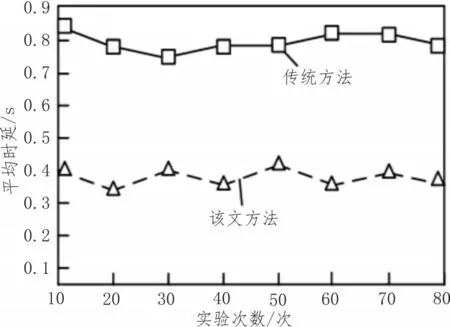
图4 数据传输平均时延实验结果
从图4 数据传输时延实验结果来看,该文方法通过蚁群算法优化了路径规划,平均时延保持在0.3~0.45 s,而传统方法的平均时延高于0.7 s。因为该文方法对不同任务的传输线路进行了优化,降低了网络拥堵和节点负载量,从而提高了数据包的传输速度。
在同一网络环境下,对不同数据发送率的节点数据包接收率进行了监测分析。当数据发送率提高,网络拥堵程度增加时,传统通信方式的路由拓扑开销增加,维护路由的拓扑信息数据需求量增加,使通信网络的不稳定性增加,通信传输失败率大大提高。而该文方法基于蚁群算法优化了传输路径,降低了通信受阻概率,使路由拓扑开销保持在一个较低的水平,通信节点的变化情况比较稳定,数据包的接收成功率较高,通信传输的效果比较理想。
6 结束语
基于蚁群算法优化后的移动自组网AODV 路由在通信传输工作方面具有更高的工作效率,优化后的传输路径更加流畅稳定,数据传输时间减少,速度有所提高。此外,网络拥堵程度比传统方法有所减轻,通信环境更加稳定,节点变动率下降,使信息数据的传输与接收成功率有明显提升。
