基于FPGA 的磁异常数据采集系统设计
2022-01-25张燕强贾云飞蔡璨
张燕强,贾云飞,蔡璨
(南京理工大学机械学院,江苏南京 210094)
金属掩埋物的探测与识别对于人类认识和开发未知领域有很大帮助,该技术已被应用于很多领域,如地下管道探测、海底掩埋物打捞、未爆弹药探测等[1]。还包括航空磁探潜是通过磁探仪探测磁异信号,从而进行航空反潜[2]。
采用磁通门传感器阵列对金属目标引起的磁场变化进行测量,从而对目标进行定位是一种有效的手段。为了对目标的精准识别和定位,要求同步采集磁通门传感器阵列输出信号,为下一步的数据处理提供基础。利用FPGA 并行运算的特性,可严格保证同步[3]。文中基于FPGA 设计了一套同步数据采集系统,通过实验验证了系统的同步性和有效性。系统采用Altera 公司(现已被Intel 收购)推出的CycloneIV 系列芯片EP4CE10F17I7N,实时性强、处理速度快、灵活性强、功能可以随时改变、功耗低[4-7]。
1 系统总体设计
文中设计的同步数据采集系统由采集部分和上位机数据处理部分组成。利用磁传感器阵列勘探磁场时,必须同步测量阵列中各传感器的信号,上位机才能进行准确解析。基于此,采集部分以FPGA 为核心,主要由磁通门传感器阵列、A/D 转换电路、数据存储电路、电源电路和无线数据传输电路组成,上位机数据处理部分由Labview 软件实现。整个系统采用插卡式的结构设计,便于后期的维护,每个磁通门传感器有X、Y和Z三路信号输出,因此,8 个磁通门传感器共有24 路信号输出,系统总体结构如图1所示。
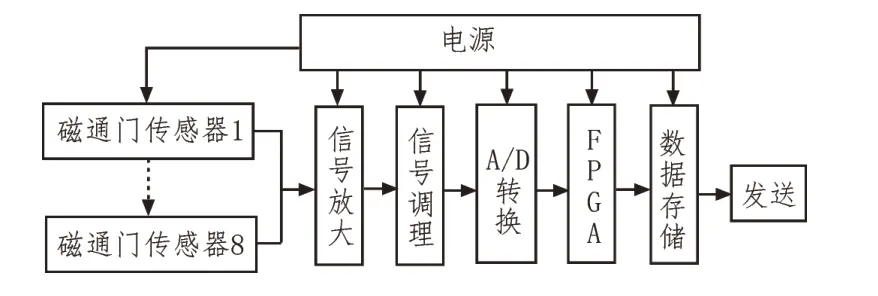
图1 系统总体结构
为了降低功耗,系统设置了休眠模式,上电后处于休眠状态,等待上位机的唤醒指令,当接收到唤醒指令后,系统返回一个握手信号,同时系统开始同步采集数据,并将采集到的数据存储在同步动态随机存储器(Synchronous Dynamic Random Access Memory,SDRAM)中[8-10],采集完成后,系统返回一个采集结束信号,等待上位机读取数据,当系统接收到读取指令后,通过WiFi 把存储在SDRAM 中磁场数据发送给上位机进行处理。
2 系统硬件设计
2.1 采集结构
为了系统工作的可靠性和后期的维护方便,整个采集系统采用插卡式的结构设计,分为主控板和采集卡两部分。每块采集卡采集一个传感器的输出信号,因此,采集系统共有8 块采集卡和1 块主控板,系统硬件结构如图2 所示。

图2 系统硬件结构
8 块采集卡采集到的传感器信号在主控芯片FPGA 的控制下,将采集到的数据存储在主控板上的外部存储器SDRAM 中,待一次采集工作完成之后,将采集到的数据发送给上位机进行处理。
2.2 A/D转换电路
A/D 转换电路采用32 位高精度的模数转换芯片ADS1262,该芯片可正负输入,输入范围为±2.5 V,其内部集成低噪声可编程的增益放大器放大倍数最高可达32 倍,可编程调节采样速率[11-14],最高采样率可达38400SPS。采集系统的每块采集卡板载3 片ADS1262 芯片,负责采集一个磁通门传感器的3 路输出信号。
采集系统所使用的磁通门传感器是西安华舜测量设备有限责任公司的新一代传感器,型号是HSF923-2H5-AA,其相关参数如表1 所示。
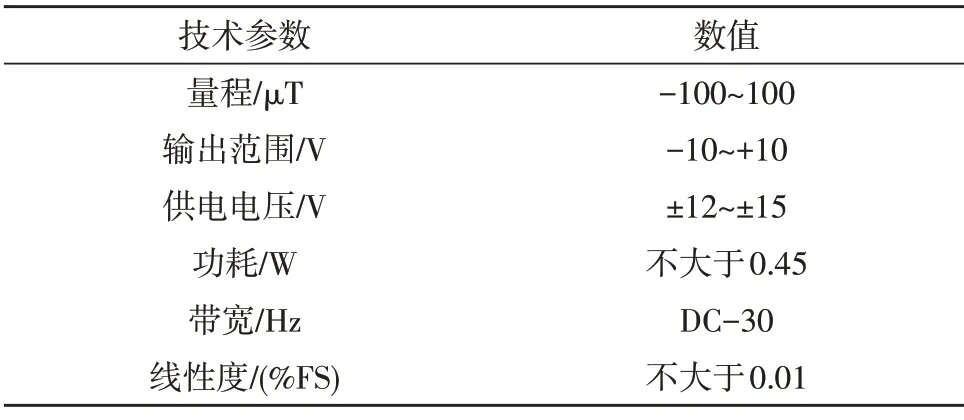
表1 磁通门传感器参数
由于传感器输出电压信号范围为-10~+10 V,ADS1262 芯片的输入范围-2.5~+2.5 V,因而,为了防止输入信号的幅值过高而烧毁芯片,在进行A/D 转换之前需要对被测信号进行相应处理[15]。在数据传输过程中,不可避免的会受到50~60 Hz 信号造成的干扰,导致信号质量下降,因此需要通过滤波进行信号质量调理[16],采集卡的电路设计如图3 所示。
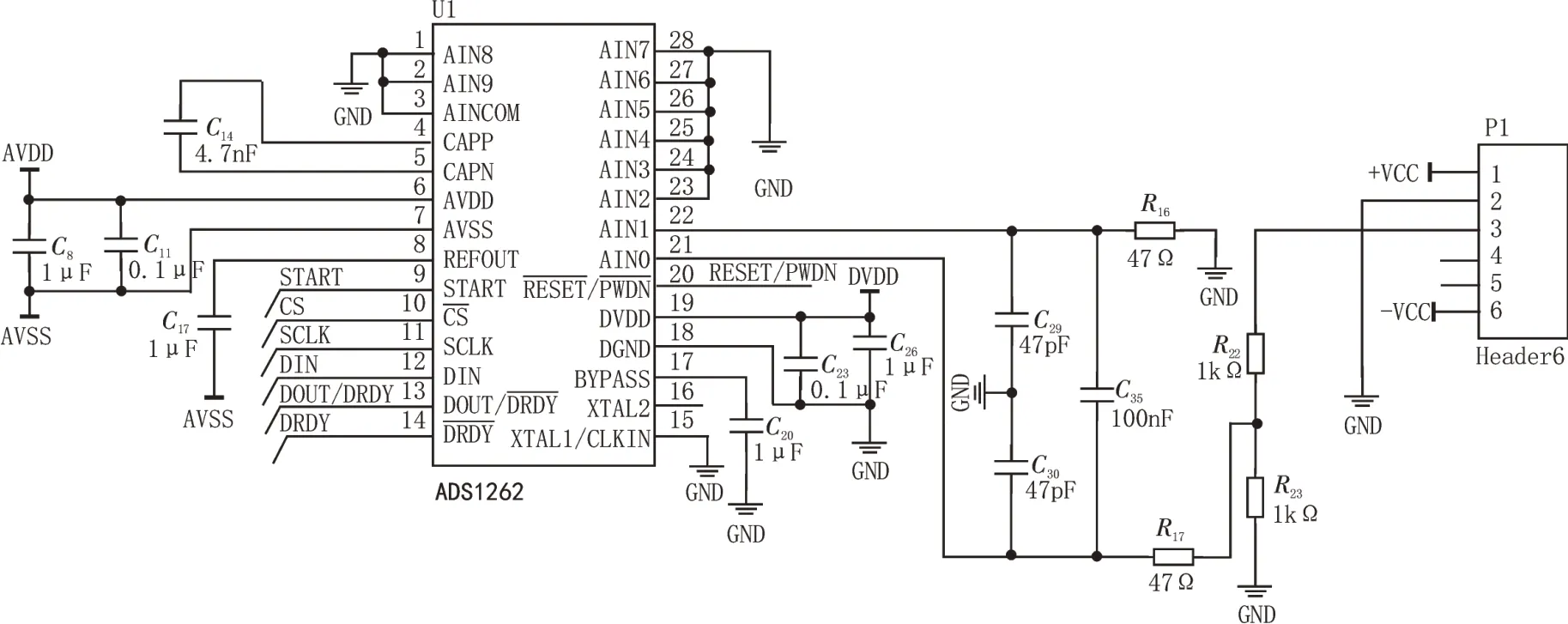
图3 A/D采集电路
2.3 存储电路
由于采集系统每次采集的数据量为22 MB,远远超过FPGA 的片上存储资源,而采集完成后的数据是立即发送的,不需保存,因而采用SDRAM 作为数据存储器,其具有价格低,读写速度快,可突发传输的特点,文中采用的型号是HY57V256GTR,SDRAM硬件连接如图4 所示。
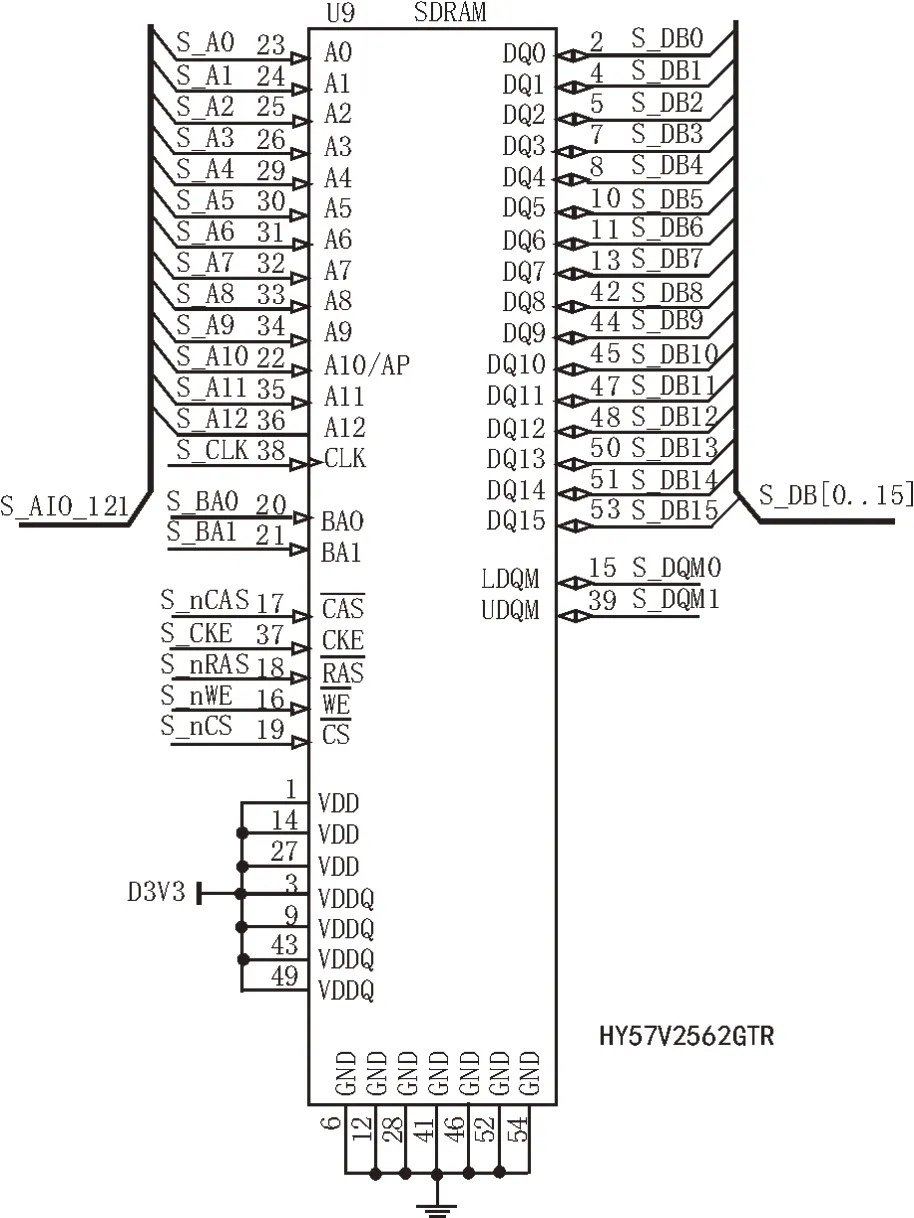
图4 SDRAM原理图
此外,在主控板上还包含一片用于无线数据发送的WiFi模块,主控板如图5 所示。
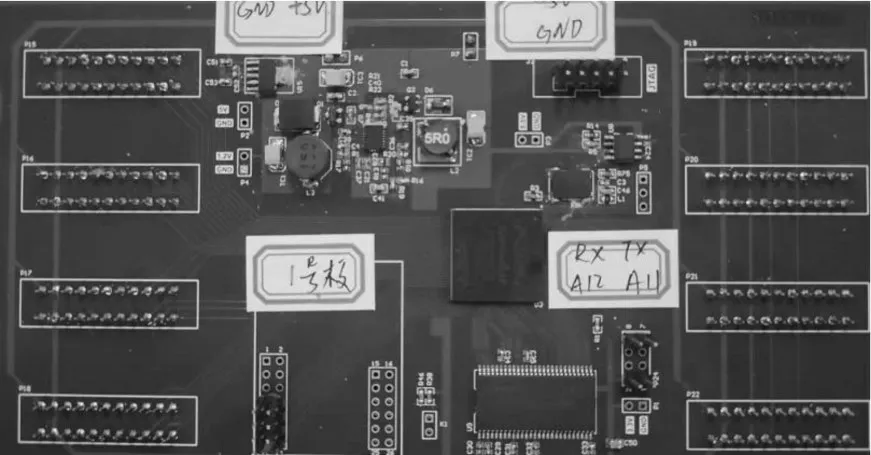
图5 主控板
3 系统软件设计
3.1 系统软件结构
系统软件部分主要包括上位机指令接收程序、A/D 同步采集程序、SDRAM 控制器程序和无线数据传输程序4 个部分,采用Verilog HDL 语言在QuartusII13.1 平台上进行开发,采集系统软件结构如图6 所示。
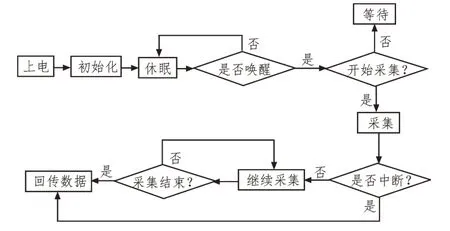
图6 采集系统软件结构
3.2 工作模式
为了降低功耗、延长工作时间,采集系统设置了休眠模式和工作模式。采集系统在上电后,首先开始初始化A/D 转换器和配置SDRAM 存储器,然后进入休眠状态,当准备开始采集时,上位机通过Wi-Fi向采集系统发送唤醒指令,在收到唤醒指令后,系统返回应答信号,代表系统已经唤醒,切换为工作模式,准备开始采集,这时如果向系统发送开始采集的指令,系统开始采集数据,持续工作时间为30 s,在采集完成后,系统会自动通过Wi-Fi 将数据发送给上位机。在采集过程中,如果向系统发送终止采集的指令,系统就会终止采集,并将这次采集的数据发送给上位机,数据发送完成后,再次进入休眠模式。
3.3 A/D同步采集程序
ADS1262 支持SPI 接口控制,整个系统共有24片A/D 芯片,由于要严格保证采集系统的同步性,因而程序设计时,应保证采集数据的指令同时发送,在接收数据时,应保证接收到的数据是同一时刻的数据,因而,采集程序采用了模块化设计的思想,其结构如图7 所示。
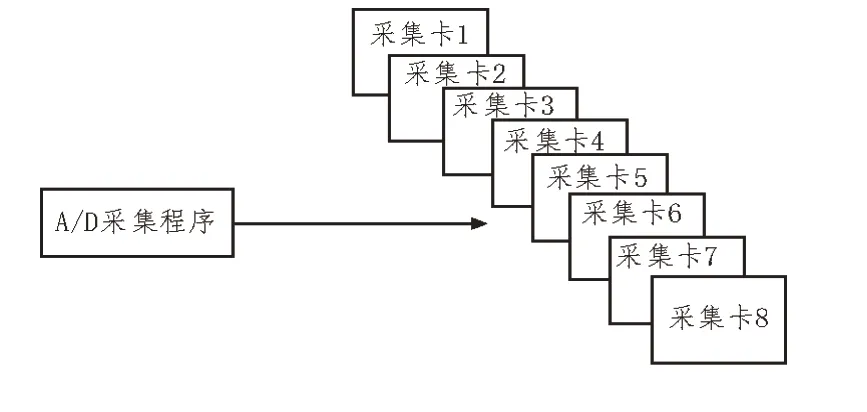
图7 A/D同步采集程序结构
3.4 SDRAM控制器程序
上电后,首先初始化配置SDRAM,由于A/D 采集的数据是32 位的,而选用的SDRAM 存储器的每个存储单元为16 位,因此,每个数据需要连续的两个存储单元来存储,将SDRAM 配置成突发传输的方式,SDRAM 的工作流程如图8 所示。
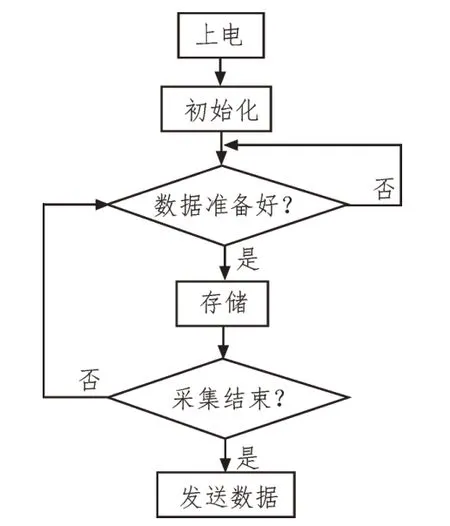
图8 SDRAM工作流程
3.5 无线数据传输
由于采集系统工作条件的限制,不能通过有线传输的方式发送数据,因而该系统采用Wi-Fi 来进行数据的无线传输。在一次采集工作结束后,系统启动数据传输模式,自动将保存在SDRAM 中的数据发送给上位机。
4 系统实验
4.1 正弦波采样测试
测试系统采集信号发生器输出的频率为20 Hz,峰峰值为2 V的正弦波,正弦波采样结果波形如图9所示。
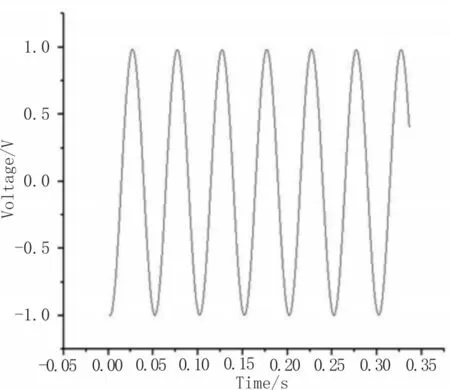
图9 正弦波采样结果
采样数据快速傅里叶变换的结果如图10 所示。
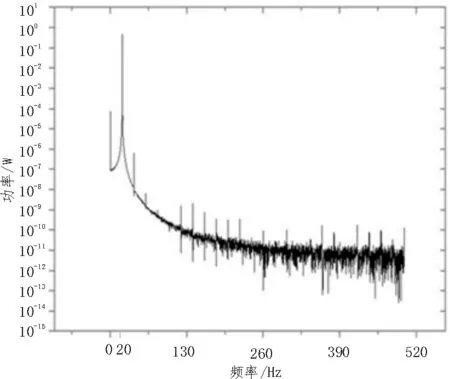
图10 采样数据快速傅里叶变换结果
通过采样波形及快速傅里叶变换结果可知,采集卡采到的信号是峰峰值为2 V、频率为20 Hz 的正弦信号,和信号发生器输出的信号一致,采集系统可正常工作。
4.2 同步性测试
利用QuartusII13.1 软件自带SignalTap 调试工具,抓取信号的实时波形,验证采集系统的同步性,同步性测试结果如图11 所示。
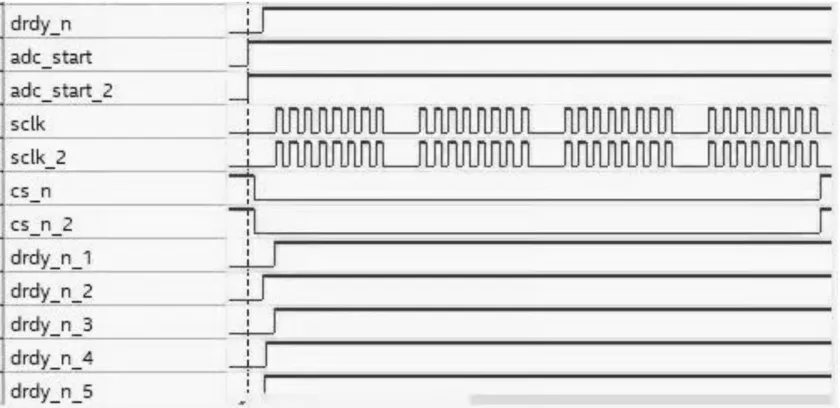
图11 同步性测试结果
可以看出,当系统接收到采集命令后,各个通道开始同时采集磁通门传感器阵列的数据,同步性良好。
4.3 噪声水平测试
在信号输入端短接并接地的条件下,测试采集系统的电路噪声,并根据数理统计的方法,将噪声的分布情况绘成如图12 所示的噪声分布曲线。
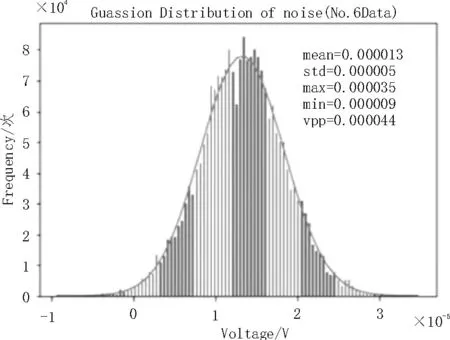
图12 噪声分布情况
以第6 个传感器的噪声数据为例,从图中可以看出,电路的噪声平均值为13 μV,最大值为35 μV,最小值为9 μV,峰峰值为44 μV。根据表1 可知,传感器的灵敏度为100 μV/nT,电路的噪声水平低于传感器的灵敏度,因而采集系统具有良好的工作性能。
4.4 目标探测实验
当在传感器附近没有目标时,传感器阵列的静态输出信号如图13 所示。
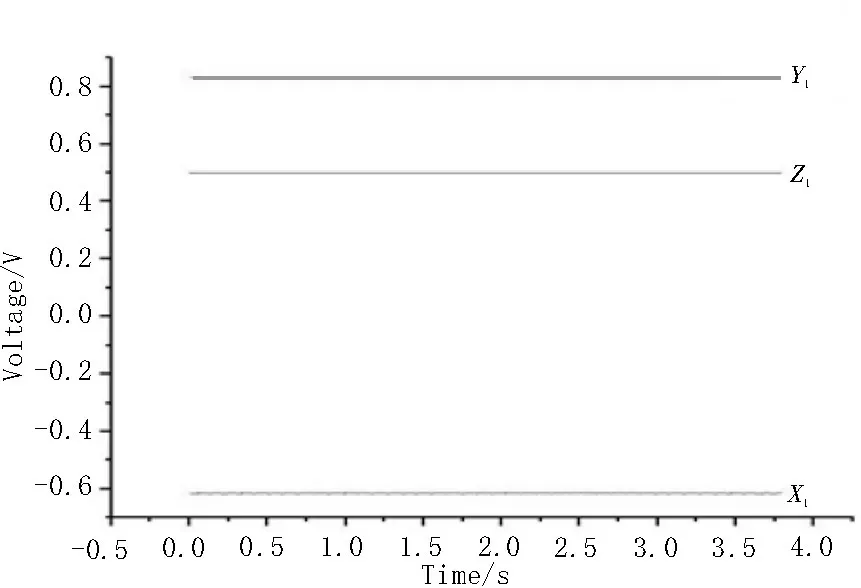
图13 传感器静态输出
采集系统开始工作以后,在距离传感器2 m 的位置挥动金属目标,目标探测结果如图14 所示。
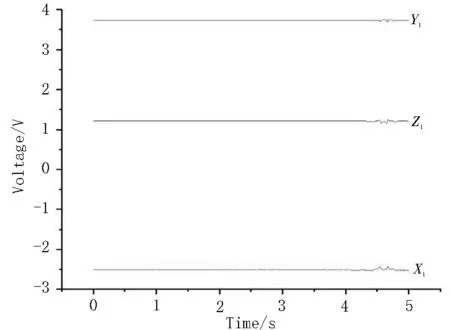
图14 目标探测结果
为了方便观察在目标探测过程中传感器各个轴输出信号的变化情况,将传感器X、Y、Z轴的输出情况分别如图15、图16 和图17 所示。
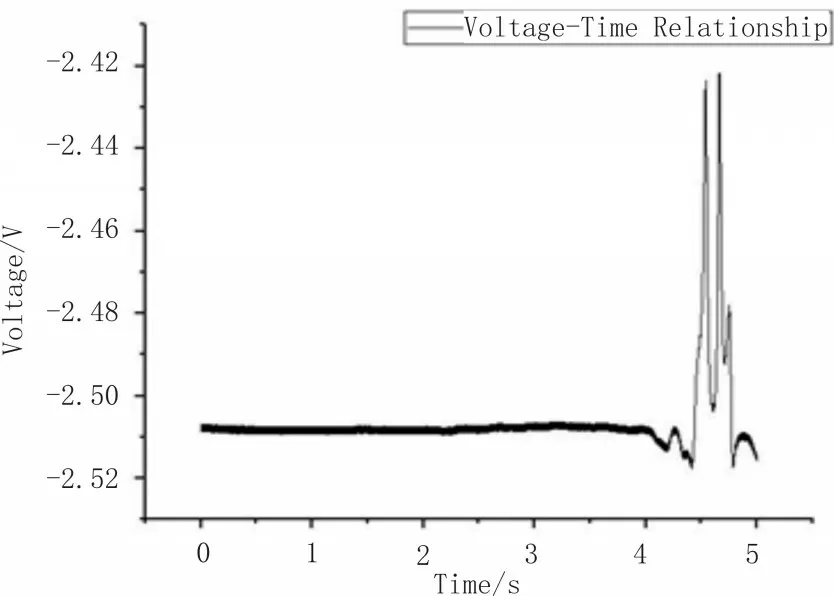
图15 X轴输出
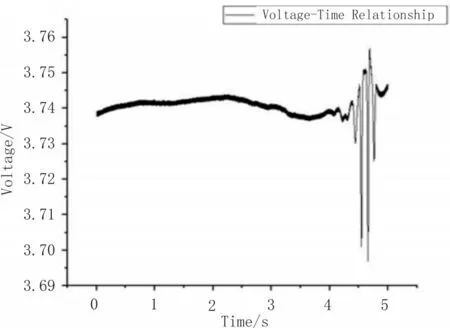
图16 Y轴输出
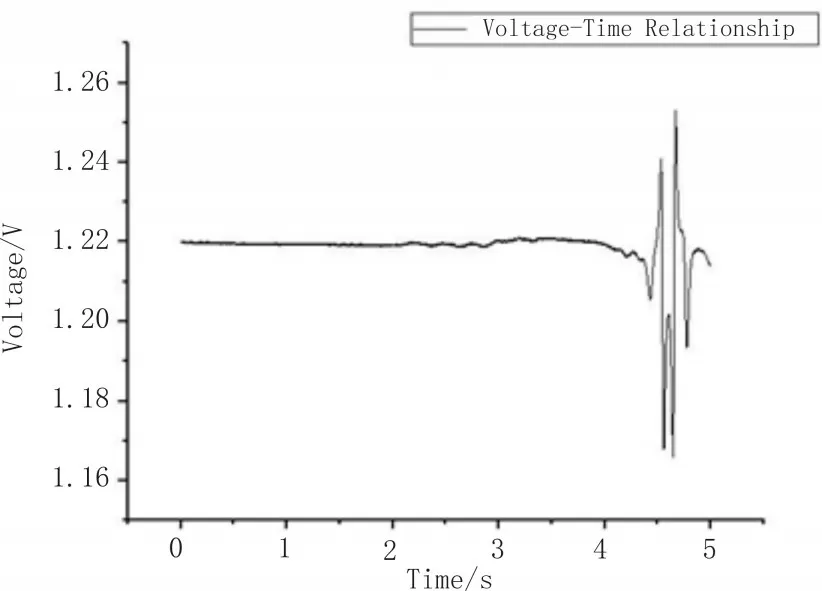
图17 Z轴输出
可以看出,当有目标出现时,传感器的输出信号有明显的波动,实现了磁异常目标探测的功能。
5 结束语
文中根据磁通门传感器的工作原理,设计了一套磁异常探测系统,重点介绍了磁异常探测系统的硬件电路设计和软件结构,实验结果表明,系统同步采集性能良好,噪声水平远低于文中所采用的磁通门传感器的灵敏度,在2 m 范围内能有效探测目标。
