基于物联网技术的电厂人员安全管理监控系统设计研究
2022-01-25彭鹏刘春志戴建炜王明平冯德权
彭鹏,刘春志,戴建炜,王明平,冯德权
(乌江渡发电厂,贵州遵义 563100)
随着智能电厂的建设和发展,电厂人员安全管 理要求越来越严格,现阶段电厂人员的安全管理模式为:制定厂内管理条例;以培训的方式规范人员行为;现场施工、日常管理工作中,对所有工作区域进行巡查监督,落实安全管理任务。为了令电厂人员安全管理效果进一步提升,传统的设计方法参照文献[1]的内容,通过优化改造计算机监控系统,设计一个用来执行人员安全管理任务的监控系统,旨在通过实时监控信息,对告警事件进行事先预警反馈。又有一些学者重视预警反馈系统的硬件组成,参考文献[2],通过优化实时监控系统通信链路,增强监控数据在传输过程中的稳定性,保证监控数据与厂内实际现状相符合。
但经过研究发现,两个传统方法设计的监控系统,存在一定的数据处理问题,因此研究基于物联网技术的电厂人员安全管理监控系统。物联网技术是根据物联网概念、物联网结构而设计的一种数据处理技术,该技术将任何设备、设施捕捉到的信息,及时通过物联网传递给系统,使系统可以通过该技术完成数据采集、查询以及其他操作。此次设计的监控系统,充分利用物联网技术的特点,对电厂人员基本信息和活动轨迹实时监控,以此为电厂人员安全管理提供性能更好的技术手段。
1 系统硬件设计
1.1 更换视频监控主要设备
以现有的传统监控系统为参照,将前端设备进行更换。监控系统最重要的组成部分为高清摄像机,此次选择的摄像机型号分别为iDS-2DE7423 MW-A/S5 星光级360 度,全景一体式高清智能摄像机以及IPC-B632-IR 高清网络球机,采用高灵敏度传感器,满足星光监控需求;超大33 倍(4.5~148.5 mm)光学变倍,看得更广、更远;光学宽动态120 dB,根据环境亮度自动切换,满足高反差场景监控需求;自适应透雾,摄像机根据雾霾严重程度,自适应调节透雾等级[3]。利用这两个摄像机,保证监控系统可以全方位无死角监控、快速定位跟踪以及报警输出等功能。此次设计选用高性能NVR(Net Video Recorder),其型号为DS-96256N-I24,全插拔模块化无线缆设计,H.265&H.264 码流混接混解,双4K 高清输出,从接、存、搜、管、控全方位满足智能应用。
1.2 网络及硬件组成设计
主要的监控系统硬件更换完毕后,选取更加适合的网络,并重新设计系统硬件组成。电厂自身设有专用的网络,因此将所有监控系统硬件一一接入到该主干网络中,同时将与监控系统相关的其他厂内子系统,包括工业电视系统、Oncall系统、消防系统等,也一并与主干网络相连接,利用该网络加强硬件与系统之间的联动性[4]。结合所有硬件设备,设计人员安全管理监控系统的硬件拓扑结构,如图1 所示。
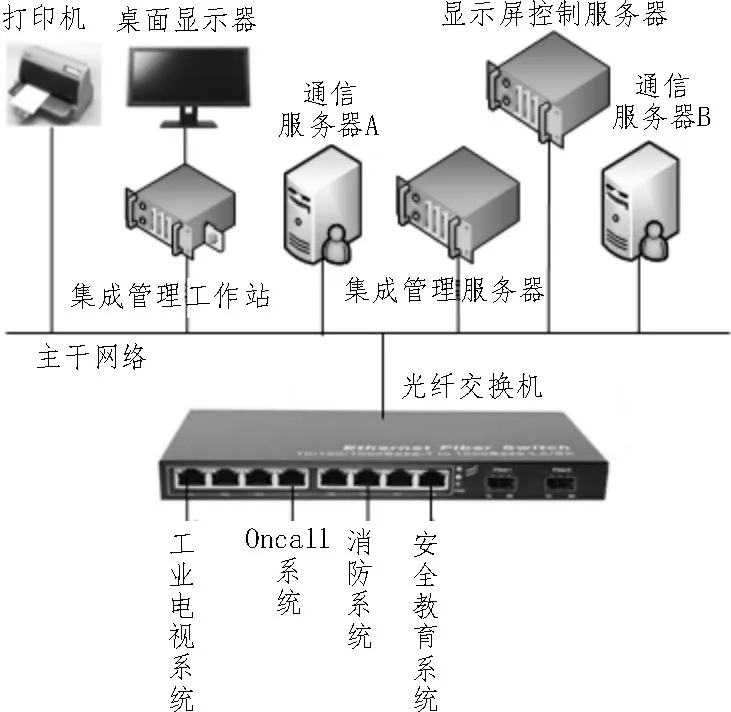
图1 硬件拓扑结构
2 系统软件设计
2.1 定位监测功能
物联网计算包含信息采集技术、无线网络通信技术、无线定位技术以及智能技术,因此利用物联网技术,设计系统采集监控信息后的人员定位监测功能。利用物联网RFID 传感器技术,采用TDOA(信号到达时间差算法),根据双曲线定位监控系统中的人员实时位置[5-6]。该算法的示意图,如图2 所示。
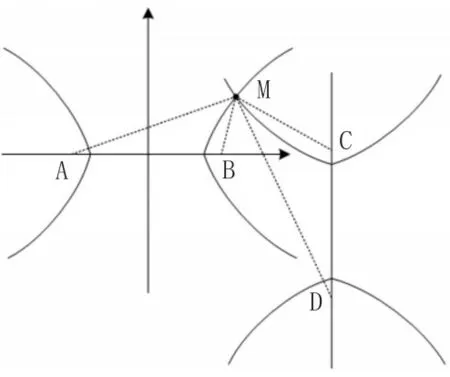
图2 信号到达时间差算法示意图
图中,字母A、B、C、D 分别代表RFID 读写器的位置。已知该位置坐标是静态固定的。字母M 代表电厂中需要定位的人员位置。TDOA 算法以AB 点和CD 点建立双曲线,当点M 位于射频读写器的射频范围内时,则利用下列公式,推算出点M 的位置坐标。

式(1)、式(2)中:RAB与RCD分别表示M 点到A点、M 点到B 点之间的距离差值;t1、t2分别表示M点射频信号,到达A 点和B 点的时间差;v表示信号传输速度;MA、MB、MD、MC 则表示点M 与RFID 读写器之间的距离[7-8]。将上式计算结果代入到双曲线公式中,计算M 点的位置坐标,得到员工在电厂的实际位置。方程为:
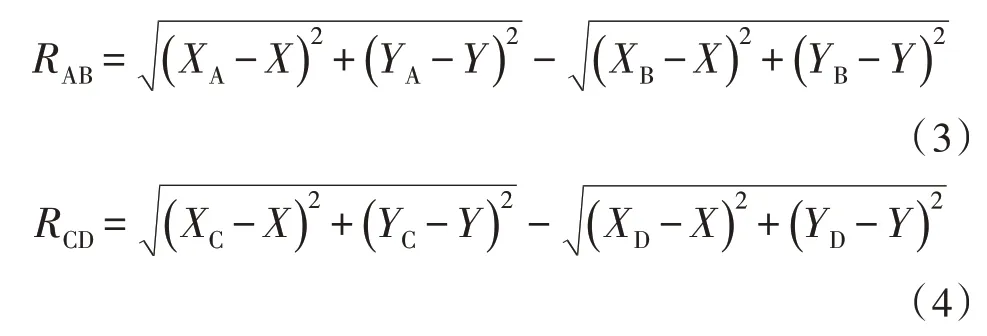
式(3)、(4)中:(XA,YA)、(XB,YB)、(XC,YC)、(XD,YD)分别表示A 点、B 点、C 点以及D 点坐标。(X,Y)为计算所求的M 点坐标。求解上述公式,计算具体的X值和Y值,得到电厂人员的实时位置,完成对人员定位监测功能的设计。
2.2 设计系统的关联分析与联动操作功能
设计系统统一管理地图的功能,将各子系统中的位置信息,整合到人员安全管理监控系统的软件地图中,设置可以叠加显示的操作模块,将各类人员位置信息作为不同图层,同时,其中简要的信息也要求在不同反馈窗口内同时显示。令系统图形化标定前端设备的作用范围,即明确摄像头扫描覆盖区域中,人员定位基站覆盖区域等,当出现安全问题时,可以在地图任意位置处,调出与该点有关的系统设备。利用物联网技术信息集成的特点,在各个子系统独立显示基本信息的前提下,令监控系统同时展现所有系统信息,其中视频系统要显示本区域定位的人员清单;Oncall 系统要显示快捷页面。令监控系统串联这些子系统,以联动的形式反馈电厂中的实时信息。同时要设计系统的信息展示页面,根据每个工作岗位实际情况,制定不同的控制键位置。还要在地图上划定围栏区域,并设定涉及此围栏的子系统,统一整合人员定位、视频监控的围栏功能,即针对人员进行定位,针对视频监控进行轨迹识别,保证系统协同工作。将其他子系统与其关联,设定禁入、禁出以及超时停止的系统报警频率[9-10]。至此完成有关数据监控方向上的系统联动设计。
再设计有关存储的系统联动方式,即子系统信号触发数据存储时,同步记录该区域的基本监控信息,保存特定时段的定位信息,同步监控区域的视频内容。在系统定位目标后,所有子系统分别自动跟踪目标,根据员工活动轨迹,切换地图和摄像头。系统联动是安全监控的核心功能,设计系统中预警模块的报警响应联动模式,根据警报级别定向发送实时状态,自动记录触发警报的人员信息,并向特定标签发布下行预警。最后设计系统预案操作联动功能,即当出现预警时,监控系统对所有厂内人员进行拍照,瞬间弹出人员的基本信息、弹出警报触发信息。至此利用物联网技术多样性的使用功能,设计系统的关联分析与联动操作功能[11-12]。
2.3 设计系统告警功能
设计的监控系统,应支持多种查询方式,包括单条件、多条件以及组合条件的监控信息查询[13-14]。表1 为设计的监控系统可查询到的告警信息。
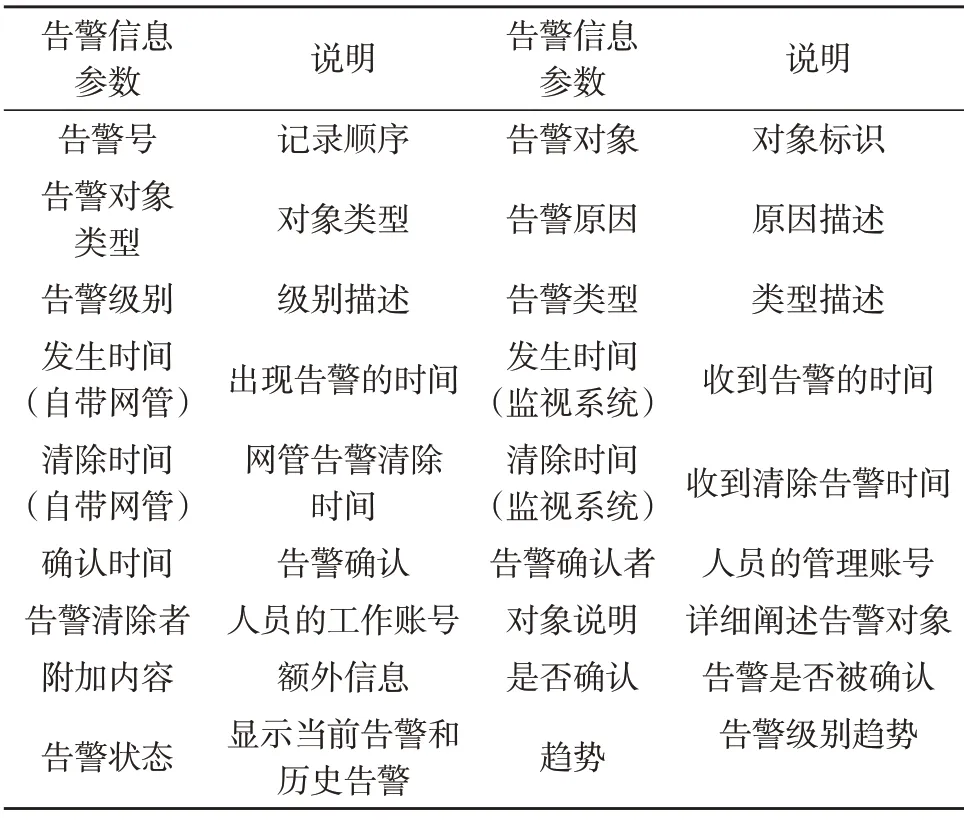
表1 告警信息参数表
3 实 验
为测试此次设计的人员安全管理监控系统性能,将该系统应用到一个模拟环境中,测试该监控系统运行是否正常,若出现运行不流畅或运行故障的地方,对该系统进行调控,若系统运行可靠,则进行对比实验测试,比较此次研究的监控系统,与两个传统监控系统之间的联动性差异。
3.1 系统性能测试
根据电厂实际设备和以往工作方式,采用B/S 模式建立人机交互,将管理监控系统与后台服务器、其他子系统通信交互。该系统应用的开发平台为Sun Microsystems 公司JAVA 平台,使用的语言为JAVA语言。
注册用户名及密码,将该系统应用到水电站电厂中,进行为期一个月的系统性能测试,为保证实验电厂工作环境的安全性,在测试期间,并没有拆除该电厂原本已经执行安全管理监控任务的软硬件设备设施,而是根据此次设计系统的要求,在电厂内找到其他需要安装摄像头的位置,并在计算机机房内安装配套的组件。一个月后统计该系统的告警次数、告警位置等信息。
所有监控信息是可查询的,且所有子系统的监控信息,都反映到主监控系统的显示界面中,可见该系统性能满足设计要求,运行并无异常,可以进一步投入实验研究中。
3.2 对比测试
对比测试将此次研究的监控系统,作为实验组测试对象;将两个传统方法设计的监控系统,分别作为对照1 组测试对象和对照2 组测试对象,图3 为3个系统的联动性监测信息精度测试结果。
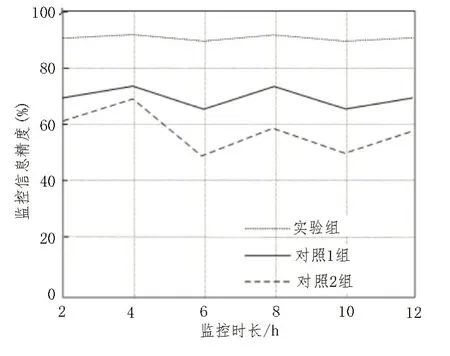
图3 系统联动性监测信息精度对比结果
根据图3 所示的系统联动性监测信息精度对比可知,此次设计的系统精度较高,系统联动性更好,得到的监控数据更完备。将所有子系统的相关监控信息,都集中反馈到主界面中,监管人员可以随时查找工厂人员安全管理监控数据,为保证系统测试结果的真实性,实验共模拟100 次告警事件,分别设置为5 个测试组(20 个/组),3 个系统的监控预警次数统计结果,如表2 所示。
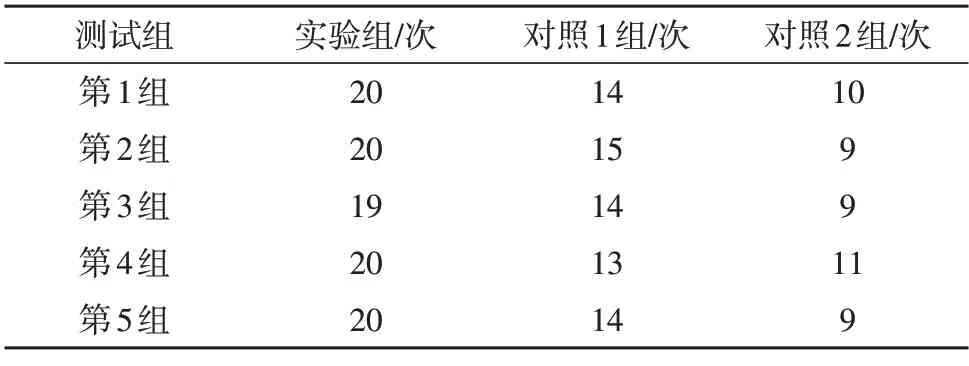
表2 预警次数统计结果
根据表2 可知,实验组只在第3 组出现了一次告警事件漏报,经调查得知,测试当天出现了短暂的网络问题,因此没有记录该次告警事件。而对照1 组和对照2 组,其预警次数比重,分别为总发生告警事件次数的70%和48%。可见此次设计的电厂人员安全管理监控系统,可以有效处理联动信息,通过完整的监控数据,实现对告警事件的实时反馈[15-16]。
4 结束语
此次设计的人员安全管理监控系统,在重新选择监控硬件的基础上,利用物联网技术可执行信息采集、无线网络通信、无线定位以及智能技术等功能,实现监控模块、各个监控位置之间的数据联动式处理,保证所有危险信息,可通过LCD 显示屏,以多样化的方式迅速反馈给监控室。但此次研究还存在一些遗憾,例如由于时间与版面限制,没有介绍每一款替换硬件的详细信息,同时也没有着重给出系统软件、硬件之间兼容性的测试结果。今后的设计与优化研究中,可以对上述两个点进行描述,深化对监控系统的分析与研究。
