基于串级控制系统控制液位的设计与分析
2022-01-25杨莉莉
毕 涛,刘 迪,杨莉莉
应用研究
基于串级控制系统控制液位的设计与分析
毕 涛,刘 迪,杨莉莉
(海军航空大学 航空基础学院,山东烟台 264001)
串级控制系统是一个双回路系统,实质上是把两个控制器串接起来,通过它们的协调工作,使一个被调量准确保持为设定值。串级系统主回路的输出用来改变副回路的设定值,起到校正的作用,副回路的任务是快速抵消落在其中的扰动,提高系统的控制品质。通过仿真分析,串级控制系统抗干扰能力比较强,曲线的波动不大,具有超调量比较小和过渡过程的时间较短等特点。稳定性得到了提高,控制效果比较好,通过对比可以看出,控制效果明显优于相对简单的单回路控制系统,从中可以体现出串级控制系统的优越性。
串级控制系统 超调量 动态性能 响应 干扰
0 引言
在最初的生产建设中,主要采用单回路系统对被控对象进行控制。随着被控对象越来越复杂,对控制质量的要求也变得越来越高,单回路控制系统已经不能满足控制要求。单回路控制系统内部只包含一个控制器,控制器用来保持一个控制参数恒定,该控制器只接收一个信号,它的输出只控制一个被控对象。但是,单回路控制系统也有它自身的弱点,如果被控对象是非线性的,当负载发生变化时,被控对象的特性就会改变。这样就导致之前的控制参数不再适应,导致控制质量下降。因此,为了提高控制的质量,保证控制系统的高质量稳定运行,需要更加先进和优秀的控制系统。伴随着工艺和科技的不断发展和创新,很多优秀的控制系统被设计出来,串级控制系统就是其中之一。串级控制系统是将两个控制器串联起来,它由主回路和副回路两个回路构成。相互之间协调工作,一个控制器的输出控制另一个控制器的设定值[1~5]。
1 串级控制系统的工作原理
串级控制系统是将两个控制器串联起来,相互之间协调工作,使一个被控量准确保持为设定值。它由主回路和副回路两个回路构成。副回路的主要任务是通过副控制器快速抵消落在其中的扰动,通过这种方法可以使干扰的影响减少许多倍。主回路的输出用来改变副回路的设定值,起到校正的作用,同时它还起到抑制和抵消副回路以外干扰的作用,使被控量准确保持为设定值[6-10]。串级控制系统结构图如图1所示。

图1 串级控制系统结构图
结构图中的被控对象为两个一阶的惯性环节,控制器是比例调节,传递函数为:

副回路的传递函数为:
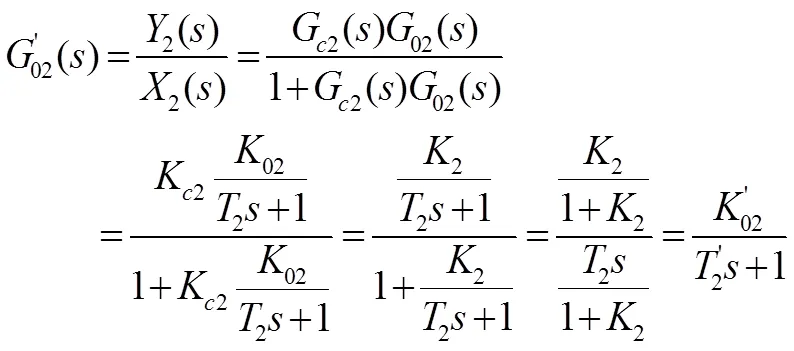
通过推导可以看出,2减小1+2倍。由于控制器是一阶惯性环节,2的值可以取得比较大。在控制系统中,误差信号的敏感程度是由主回路放大系数的数值来决定的。放大系数调整的更大对提高系统的抗干扰能力是有益处的。副回路的抗干扰能力要比主回路的抗干扰能力要强大。主回路是一个定值控制系统,副回路是一个随动系统,它的设定值随主控制器的输出而变化。这样主控制器就可以按照负荷的变化调整控制器的设定值,从而保证控制系统的控制质量[11~15]。
2 串级控制系统的整定原则
在控制系统中,偏差信号的敏感程度是由放大系数值来决定的。这也反应了控制系统的抗干扰能力。在串级控制系统中,增加了一个副回路,当干扰落在副回路中时,系统的抗干扰能力要比单回路控制系统有所增强。在单回路控制系统中,如果被控对象是非线性的,当负载发生变化时,被控对象的特性就会改变。这样之前的控制参数不再适应了,导致控制质量下降。在串级控制系统中,主回路是一个定值控制系统,但副回路却是一个随动系统。它的设定值是随主控制器的输出而变化的。这样主控制器就可以根据负载的变化相应的调整设定值,使控制系统仍具有较好的控制质量。串级控制系统的整定要比单回路控制系统复杂,两个控制器串联在一个系统中,相互之间会有些影响。在调节参数时,要加大副控制器的增益,提高副回路的工作频率。使主回路和副回路的频率错开,以减少彼此之间的影响,提高控制的质量。通常,副回路的被控对象的时间常数较小,而副回路以外的被控对象的时间常数较大,主回路和副回路的工作频率相差较大。调节控制参数时,先除去主控制器,在主回路断开的情况下,调节副回路控制器的参数,等到调节完毕后,加上副回路外的被控对象,再按照常用的方法调节控制器参数。通常,串级控制系统对副回路的控制质量指标没有严格的要求,而主回路的控制标准要求比较高。在调节控制参数时,只要保证好主回路的控制质量指标,副回路的控制标准可以降低一些[16~20]。
3 串级控制系统的设计
液位串级控制系统如图2所示。阀门的开关程度是控制系统的重要参数。为了保证储水箱里的液位恒定,传感器可以测量液位的实际高度。当注入水箱里的水发生扰动时,控制器开始动作来控制水的流量,但是要经过较长的滞后才能起作用,这样不能及时反映调节效果,对系统的安全运行会造成影响。为了解决这个问题,再加入一个副控制器,构成一个串级控制系统,当注入到水箱里的水发生扰动,副控制器率先反映出流量的变化,而主控制器的输出用来改变副控制器的设定值,起到校正的作用,减少了扰动对液位变化的影响,提高了系统的控制品质[16-18]。主控制器与副控制器相互之间协调工作,主控制器有独立的设定值,而副控制器控制水的流量。副回路的主要任务是通过副控制器快速抵消落在其中的扰动,一般采用PID进行控制。主回路的输出用来改变副回路的设定值,起到校正的作用,一般采用PI控制。在实际当中,主回路和副回路的工作频率是不同的。运行时应该提高副回路的工作频率,使主回路和副回路的频率区别开,以降低它们之间的影响,提高控制质量。在串级控制系统中,对主回路的指标要求比较严格,副回路的要求是快速抑制干扰,只要保证了主回路的控制指标,副回路可以相应降低一些[21~26]。
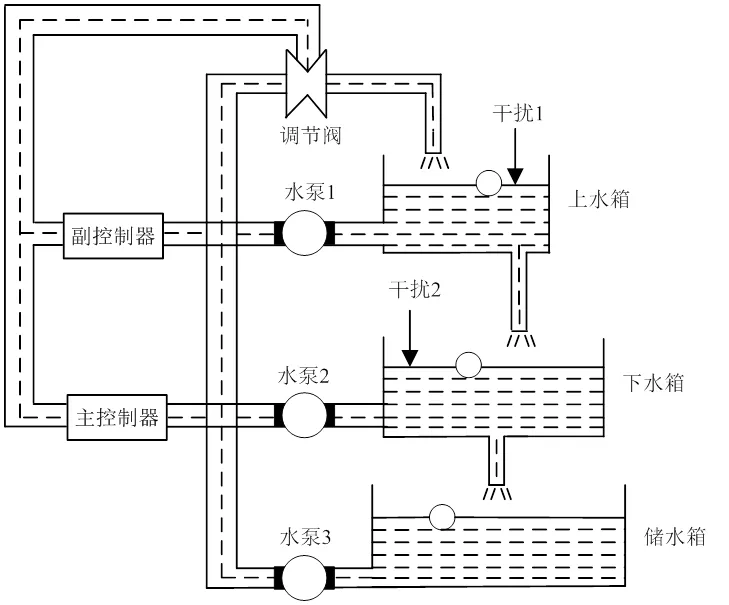
图2 液位串级控制系统
4 仿真说明

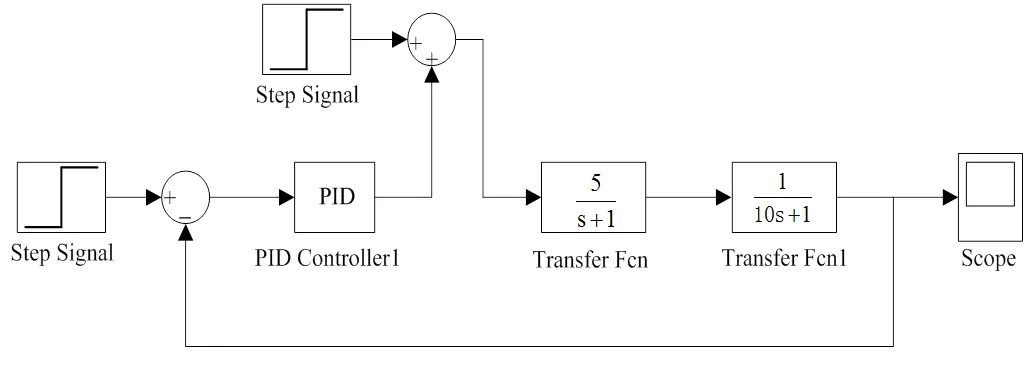
图3 单回路控制系统SIMULINK模型图
图3是一个单回路控制系统,里面只包含一个PID控制器,在中间环节加入了一个阶跃干扰以后,从图4中可以看出波形的振荡比较大,超调量较大,曲线的波动比较大,过渡时间较长,稳定性和鲁棒性都比较差。这说明单回路控制系统对干扰的抑制作用比较弱。

图4 单回路控制系统的仿真
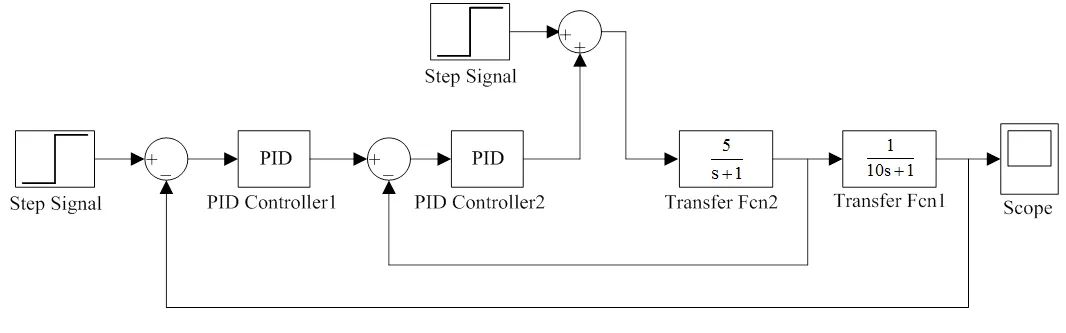
图5 串级控制系统SIMULINK模型图

图6 串级控制系统的仿真
串级控制系统SIMULINK模型图如图5所示,串级控制系统的仿真波形如图6所示。在副回路中的PI控制器:比例系数(P)选择5,积分时间(I)选择3;在主回路的PID控制器:比例系数(P)选择5,积分时间(I)选择2,微分时间(D)选择1。主回路的输出用来改变副回路的设定值,起到校正的作用,副回路的任务是快速抵消落在其中的扰动,提高了系统的控制品质。在主回路中采用PID控制器,在副回路中采用PI控制器,对主回路整定,对副回路微调。从仿真曲线可以看出,在副回路中加入一个阶跃干扰以后,串级控制系统的过渡过程比较平稳,超调量比较小,曲线的波动不大,稳定性比较好,体现出较强的抗干扰能力和适应性,控制效果明显优于相对简单的单回路控制系统,体现出串级控制系统的优越性。
5 结论
串级控制系统是将两个控制器串联起来,相互之间协调工作,使一个被控量准确保持为设定值。它由主回路和副回路两个回路构成。主回路的输出用来改变副回路的设定值,起到校正的作用,副回路的任务是快速抵消落在其中的扰动。通过仿真分析,利用MATLAB语言中的SIMULINK模块对系统进行了分析,串级控制系统的过渡过程比较平稳,超调量比较小,稳定性好,体现出较强的抗干扰能力和适应性。通过对比可以看出,控制效果明显优于相对简单的单回路控制系统,从中可以体现出串级控制系统的优越性。
[1] 卢春华, 王頔. 基于数字PID的双容水箱液位串级控制系统设计[J]. 应用能源技术, 2019(1): 51-52.
[2] 刘春蕾, 宋盼想等. 基于串级控制的电加热固体储能供热控制系统研究[J]. 河北建筑工程学院学报, 2020, 38(1): 111-115.
[3] 王志刚, 虎恩典, 王宁. 基于PLC的双容水箱液位串级PID控制的实现[J]. 电子设计工程, 2014. 22(22): 131-133.
[4] 陈圣桂, 王超, 朱鹏远等. 基于模糊自适应PID的热交换器温度控制仿真[J].工业控制计算机, 2017, 30(8): 105-106.
[5] 万敏. 串级控制系统中控制器正反作用选择的一种改进教学方法[J]. 教育现代化, 2020, 46(6): 68-70.
[6] 卢明阳. 基于Labview与Simulink的过程控制仿真系统的开发[J]. 电子制作, 2015(9): 3-4.
[7] 武彬, 张栾英. 模糊自整定PID控制在主汽温控制中的应用[J]. 计算机仿真, 2015, 32(2): 387-390.
[8] 胡浩, 王洪诚. 赵全基于串级控制的加热炉Smith预估温度控制系统[J]. 自动化技术与应用, 2014, 33(12): 6-8.
[9] 罗及红. 基于PID算法的炉窑温度串级控制系统设计[J]. 计算机测量与制, 2012, 20(12): 3243-3245.
[10] 卢春华, 石峰, 范六灿. 双容水箱液位控制系统设计[J]. 山东工业技术, 2018(13): 23-25.
[11] 帕孜来·马合木提, 杨华伟. 基于DCS的电锅炉温度控制系统设计[J]. 实验技术与管理, 2016(3): 82-85.
[12] 孙欢欢, 莫乐平等. 基于组态王的水箱液位PID控制设计[J]. 工业仪表与自动化装置, 2016, 4: 102-104.
[13] 肖宝森.基于PLC的锅炉温度串级控制系统的设计与应用[J]. 三明学院学报, 2017, 34(2): 63-68.
[14] 王刚, 陆海荣,白绪涛等. 模糊自适应PID控制在主汽温控制中的应用研究[J]. 电力安全技术, 2017, 19(11): 40-43.
[15] 陈雷, 雷松泽, 杨丽娟. 基于PID的液位控制系统的设计与实现[J]. 通讯世界, 2014(5): 876-878.
[16] 马永光, 毛求福. 基于DMC-PID串级控制的超临界机组给水系统研究[J].电力科学与工程, 2018, 34(7): 61-67.
[17] 宋清昆, 曹剑坤, 韩笑. 关于三容水箱系统水量液位优化控制研究[J]. 计算机仿真, 2016, 05: 330-334.
[18] 张天宇. 调节器正反作用的判定方法[J]. 化工设计, 2019, 29(4): 38-42.
[19] 吴成渝, 王超, 李斌. 模糊自适应PID串级控制在主汽温控制中的应用[J]. 电子设计工程, 2018, 26(22): 122-125.
[20] 董海兵, 罗雪莲. 基于组态监控技术的水箱液位串级控制系统设计[J]. 东莞理工学院学报, 2018, 25(3): 47-52.
[21] 刘春胜, 王劭伯. 串级控制在锅炉主蒸汽温度控制中的应用[J]. 工业控制计算机, 2006, 19(9): 29-30.
[22] 王启志, 王晓霞, 王永初. 一种自适应模糊串级控制仿真[J]. 计算机仿真, 2003, 20(3): 65-68.
[23] 万敏.串级控制系统中控制器正反作用选择的一种改进教学方法[J]. 教育现代化, 2020, 6(46): 68-70.
[24] 左兵, 杨小健.串级控制在PLC控制系统中的实现及应用[J]. 工业控制计算机, 2005, 18(4): 1-3.
[25] 杨森, 刘真. 浅谈自控系统中各环节正反作用的判定[J]. 山东化工, 2015, 44(18): 96-97.
[26] 张天宇. 调节器正反作用的判定方法[J]. 化工设计, 2019, 29(4): 38-42.
Design and analysis of liquid level control based on cascade control system
Bi Tao, Liu Di, Yang Lili
(School of Basic Science for Aviation Naval Aeronautical University, Yantai 264001, Shandong, China)
TP253
A
1003-4862(2022)01-0001-04
2021-10-20
国家自然科学基金(51377168)
毕涛(1986-),男,讲师。主要从事电气工程自动化。Email:liudi5388466@163.com