基于5G子基站的室内定位卷积神经网络模型*
2022-01-23谢海情汪章紫璇陆俊霖宜新博曾梦琳文勇军
谢海情,汪章紫璇,陆俊霖,宜新博,曾梦琳,文勇军
(长沙理工大学物理与电子科学学院,湖南 长沙 410114)
0 引 言
随着物联网的发展,社会需求的各个方面对基于位置的服务提出了更高更深层次的要求,如在解决室内环境中小孩和老人走失、突发事件进行紧急处理、室内发生火灾和地震时的紧急救援等方面具有很高的应用价值[1].在室内环境中,由于现代化建筑中大量的钢筋混泥土结构框架,导致信号传输路径受损,全球定位系统(global positioning system,GPS)在室内环境中无法发挥作用.国内外学者先后提出了 Wi-Fi定位技术[2-3]、蓝牙定位技术[4]、射频识别技术(radio frequency identification,RFID)[5-7]、超声波定位技术[8]、超宽带(ultra wide band,UWB)定位技术[9]、红外线定位技术[10]、可见光定位技术[11]和磁场定位技术[12-13]等室内定位技术.
根据终端采集的数据,采用定位算法对数据进行处理,才能实现精确定位.传统的定位算法有三角定位算法[14-15]和位置指纹算法[16].位置指纹算法主要分为确定性算法与贝叶斯概率算法[17]2类:确定性算法通过计算在待测点位置采集的信号强度与指纹数据库之间的匹配程度完成待测点的坐标估计,主要为 K 近邻算法[18]与加权 K 近邻算法[19];贝叶斯概率算法通过在线阶段接收到的信号强度值,计算每一个参考点位置概率,选择概率最大的参考点作为待测点的位置估计值,定位精度不高.近年来,随着深度学习在图像和语音处理等方面的成熟应用,研究者采用机器学习方法寻找位置指纹与实际位置的映射关系,利用神经网络对指纹数据提取特征,最后利用提取到的指纹特征对待测点位置进行估计,取得较好的定位效果[20].目前,Wi-Fi位置指纹识别将信号采集与室内定位相关联,无需准确的无线访问接入点(wireless access point,AP)位置,根据检测到的信号模式来确定位置特征,从而在室内部署中具有很高的可行性.但是,Wi-Fi信号作为一种无线电信号,在传播过程中很容易受到多种环境因素的干扰,导致信号具有严重的不稳定性.在指纹采集过程中,环境变化导致采集到的指纹信号波动很大,需重新采集指纹构建指纹数据库,增加了实现室内定位所需的工作量与成本,导致指纹定位系统难以在室内环境中进行部署.
5G作为下一代移动通信技术,具备低成本、低能耗和安全可靠的特点.但5G通信载波频率达到几十GHz,穿透墙面能力差.因此,需要在室内布置大量的子基站以实现网络覆盖.根据5G网络的信号传输原理,子基站的全新无线空口(new radio,NR)可作为室内定位系统的数据采集终端AP.本文采用5G子基站替代传统Wi-Fi AP,将5G技术与卷积神经网络(convolutional neural network,CNN)算法相结合,提出一种基于5G NR参数的室内定位方案.该方案使用的数据量小、计算复杂度较低、定位精度较高.
1 5G NR定位方案
5G NR定位原理如图1所示,主要由5G NR信号数据获取、构建位置指纹库、神经网络模型训练和匹配定位4部分组成.利用采集待定位位置的5G NR参数值,通过匹配算法估计出待定位位置的坐标.
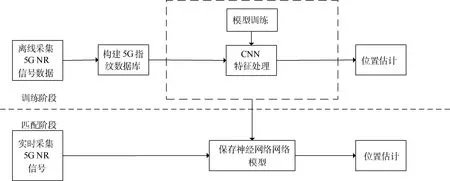
图1 5G NR定位原理
在待定位区域布置n个5G NR信号源,并将待定位区域划分为大小合理的网格点.移动设备依次遍历各个网格点进行信号采集,并记录当前网格点所接收到AP的同步信号接收功率(synchronization signal reference signal received power,SS-RSRP)、同步信号信噪比(synchronization signal signal to interference noise ratio,SS-SINR)和同步信号接收质量(synchronization signal reference signal receiving quality,SS-RSRQ)等5G NR指纹参数,对采集的原始数据进行预处理,将处理以后的数据保存到指纹库,为CNN提供数据来源.通过机器学习训练神经网络模型,定位时根据采集的5G NR信号,运用模型计算输出待测目标位置编号.
1.1 数据预处理
1.1.1 5G NR数据获取与清洗
在5G NR室内定位中,采集SS-RSRP、SS-SINR和SS-RSRQ 3个参数作为特征值.为减小测量中出现的误差,使用3σ准则对处理的数据做限幅处理,去除因偶然因素引起的极端值.通过计算高斯分布的标准差,筛选出符合3σ准则的集合Ωn,其表达式为:
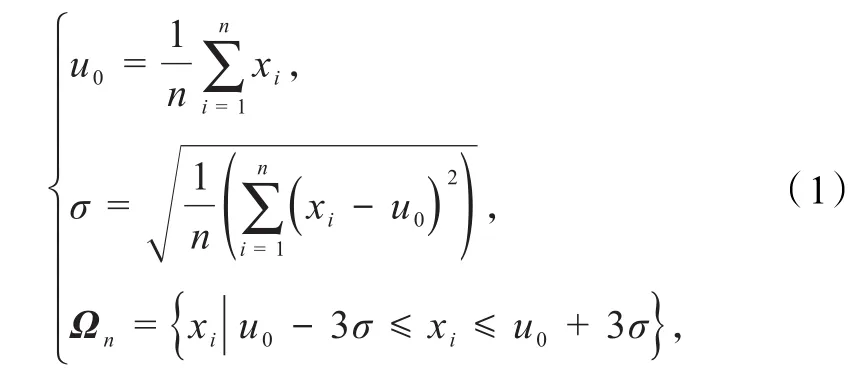
式中:xi为第i个 SS-RSRP、SS-SINR和 SS-RSRQ原始数据,u0和σ分别为对应参数的平均值和标准差.
采集数据后,使用3σ准则清洗掉异常数据,筛选出有效的SS-RSRP、SS-SINR和SS-RSRQ值存入指纹库或用于匹配定位.
1.1.2 构建位置指纹库
为了构建指纹库,在定位区域中部署k个AP,将该区域划分为N=n×n个网格,如图2所示.

图2 数据网格
设每个网格编号为L,取值为 0,1,2,…,N-1,网格中心点坐标为(x,y),L与坐标之间满足

通过移动终端在网格编号为L的位置处采集接收来自于不同AP的5G NR参数值.将测量值和编号L形成的数据存入指纹原始库,数据结构为

式中:k为AP编号,参数R、Q和S分别对应5G NR信号参数中的SS-RSRP、SS-RSRQ和SS-SINR值.在一个点进行多次测量,将数据进行清洗后形成位置指纹库.
1.2 卷积神经网络模型
使用CNN模型进行室内定位.定位区域划分为48个网格,共设置3个AP,每个位置所测试的指纹向量各不相同,利用不同指纹向量作为输入来进行卷积操作,将卷积提取出来的特征值输入至全连接层进行学习和分类.CNN模型如图3所示.将采集的5G NR信号参数PL重塑为3×3的矩阵,输入到CNN模型中,与不同的卷积核进行卷积,提取输入数据的特征.对卷积层输出数据进行拉平操作,以1×64的向量形式输入到全连接层.
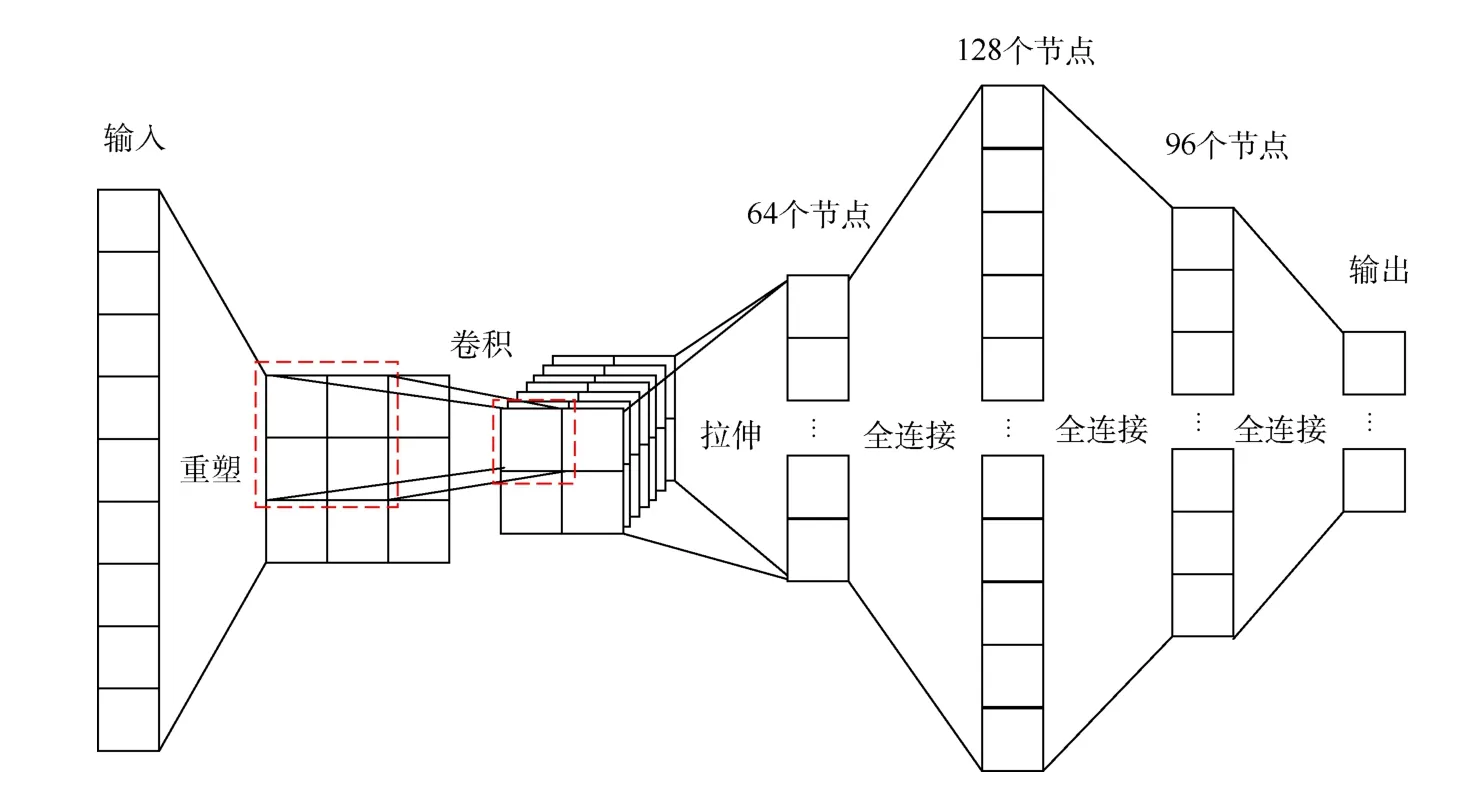
图3 CNN网络模型
卷积层主要用来进行特征提取,既能将原始数据作为输入,又能使用上一层的输出作为输入.计算时在相应的矩阵上不断滑动,将其局部矩阵与卷积核矩阵内所有的元素相乘再求和,具体的计算关系式为[21]
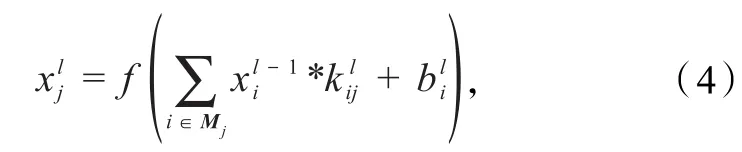
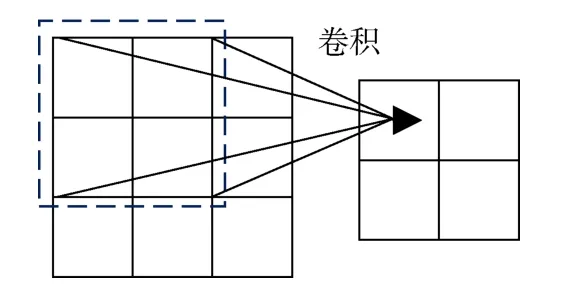
图4 卷积计算示意
经过卷积操作之后,再输入到全连接层.全连接层由输入层、2层隐藏层和输出层等部分构成,其作用主要是实现分类,相应的神经元数量分别为64、128、96和48个,全连接层结构如图5所示.隐藏层的激活函数采用ReLU函数,输出层激活函数采用softmax函数.

图5 全连接层结构
本文采用的参数优化方法为自适应矩估计(adaptive moment estimation,Adam).Adam 结 合AdaGrade算法和RMSProp算法的优点,保留历史梯度的信息以避免陷入局部最优.Adam算法首先计算历史梯度的指数加权平均值和历史梯度平方的指数加权平均值,其公式为:


式中:mt和νt是梯度的一阶矩(均值)和二阶矩(有偏方差)的估值 .δ1和δ2为目前估值的指数衰减率,gt为本次迭代计算出的梯度.
δ1和δ2的值接近 1(推荐值),且mt和νt的初始值为0向量.因此,在迭代刚开始,一阶矩和二阶矩的估值会存在较大的偏差,可按式(7)和(8)修正偏差:
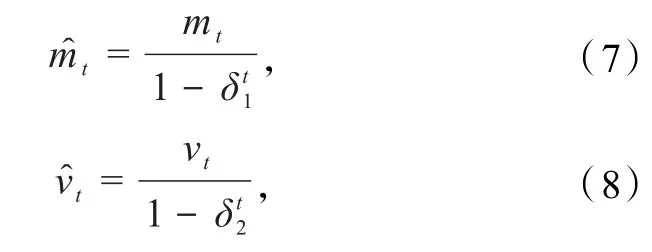
修正后的2个值对梯度进行更新为
式中:t为迭代次数,α为学习率,ε为避免分母为0的小常数(取10-8).
1.3 匹配定位
根据待测目标节点的5G NR参数测量值,运用训练出来的神经网络模型预测目标位置编号,并由公式将目标位置编号转化为坐标,其表达式为:

式中:α为纵坐标最大值加1,L为位置编号.
2 实验与分析
2.1 数据采集
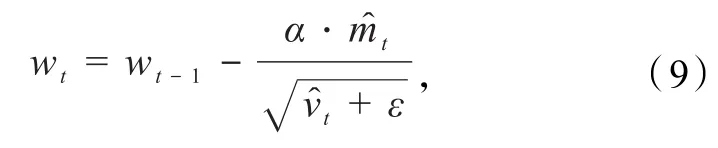
为了验证算法在室内定位中的效果,在长沙县某营业厅一楼大厅进行实验,其室内环境平面如图6所示.定位区域约为38.4 m×12.8 m,将该区域均匀分割成48个网格,网格的边长约3.2 m.蓝色原点标记为每个测试小区域的中心位置,为采集数据的位置 .共设置 3个 5G AP,分别为AP1、AP2和AP3,黑色圆点为其放置点.通过手持移动终端设备在待测区域内移动采集5G NR数据,在48个参考点上分别采集来自不同AP的120组数据,共计5 760个样本,将采集到的数据及对应的位置标签保存为位置指纹库的原始数据.
图6 某营业厅平面
2.2 模型计算与验证
实验中使用的5G信号发射器为华为分布式皮站pRRU5951.实验数据采集终端为华为P40,其配置了EMUI 11.0.0操作系统.使用华为5G测试软件PHU进行采集,使用Assistant软件对数据进行解析.
本实验选择精确率(precision,P)、召回率(re-call,R)和微平均(micro F1-score,F),即 PRF值,以及交叉熵损失(categorical crossentropy loss,C)、方差和真实数据与测试数据的平均误差,作为评价指标.各个评价指标的计算公式分别为:
方差是衡量一组数据离散程度的度量参数,用方差表示预测值与真实值的离散程度.其计算公式为
在评估室内定位算法性能时,可以使用平均定位误差对定位算法进行性能评估.采用欧式距离(Euclid distance,E)表示实际点与预测点的误差,把位置标签转化为坐标,计算出E作为每个点的实际标签位置与预测标签位置的误差,其计算公式为:
式中:E表示定位误差表示平均定位误差,Ei为第i个样本的定位误差.xr和yr表示实际参考点横纵坐标的值,xp和yp表示预测标签转换的横纵坐标的值,N为测试数据的样本个数.平均误差越小,定位精确度越高.
2.3 结果与分析
为验证室内定位算法的性能,选择深度神经网络(deep neural networks,DNN)模型作为对比的基准模型,其结构与CNN模型的全连接层完全一致.将5G NR原始指纹数据经过清洗后,随机抽取2 400条数据作为输入值.其中训练集大小为2 160,验证集大小为240.每批次取128个数据,对模型进行总计1 000次的迭代训练.2种模型训练过程各指标参数变化情况如图7所示.随着训练次数的不断增多,模型准确度不断得到改善且趋于稳定,DNN模型的定位精度达到92%,CNN模型的定位精度达到96%.训练集与验证集准确率差值始终较小,未出现过拟合或欠拟合的情况,CNN模型各项指标均高于DNN模型.
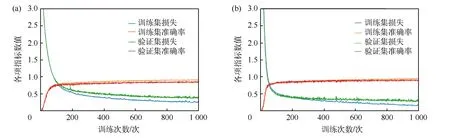
图7 DNN和CNN模型训练指标参数
本文从数据集中随机抽取一批数据,对2个网络模型进行10次测试,测试结果列于表1所示.可知,CNN模型的PRF值均优于DNN模型.采用CNN模型训练之后,预测坐标与真实坐标方差指标优于DNN模型.DNN模型方差平均为0.04 m,而CNN模型方差平均为0.02 m,CNN模型方差值整体偏小,波动幅度不大.DNN和CNN模型实际标签位置与预测标签位置的平均误差距离均在2.00 m以内.DNN和CNN模型每组数据的平均误差分别为1.62和1.33 m,其最大平均误差分别为2.00和1.85 m.CNN模型各项评价指标均优于DNN模型,基于5G子基站的室内定位CNN模型能有效提高室内定位精确度.

表1 评价指标数据测试结果
3 结 论
本文采用网格化的方式将定位区域划分为若干个网格,每一个网格中心处设置一个参考点,将采集到的数据及对应的位置标签保存为位置指纹库的原始数据.采用CNN模型对收集的5G NR参数进行学习,Adam算法设计了一个基于5G子基站的室内定位CNN模型,并采用Adam算法对模型进行优化.实验结果表明,优化后的CNN模型计算复杂度小,平均误差为1.33 m,定位精度高且定位效果好.
