基于树莓派计算模块和FPGA的便携式磁力仪数据采集系统设计
2022-01-22张谨黄成功
张谨,黄成功
(中国船舶重工集团公司第七一五研究所,浙江杭州,310012)
0 引言
铯光泵磁力仪是量子磁力仪的一种,是基于光泵技术和磁共振技术的磁场测量仪器。铯光泵磁力仪其原理是通过光泵作用使吸收室中的原子发生光学取向,然后施加外部射频磁场,外部射频磁场的频率同塞曼磁次能级间的跃迁频率一致,使磁次能级间发生强烈的磁共振现象,完成去取向。根据磁共振频率可以换算得到磁场强度。
铯光泵磁力仪主要用在海洋、地面、航空、生物医疗等领域。由于磁力仪在国民经济、空间探测、军事技术和导航领域的重要作用,它一直是各个国家研究的重点。本文提出一种基于树莓派计算模块和FPGA的便携式磁力仪数据采集系统,具有灵活小巧,低功耗等优点。
1 总体设计
便携式磁力仪数据采集系统可分为二个部分:一是以FPGA为核心的数据采集融合部分,其主要由:2通道滤波整形模块、FPGA模块和电池管理模块组成;二是以树莓派计算模块为核心显控部分,其主要由:树莓派计算模块、LCD显示、键盘、触摸屏、eMMC存储器和全球定位系统组成。两部分之间通过SMI总线相连接,实现两部分之间的数据交换。便携式磁力仪系统框图,如图1所示,具体的硬件电路设计在第3节详细描述。
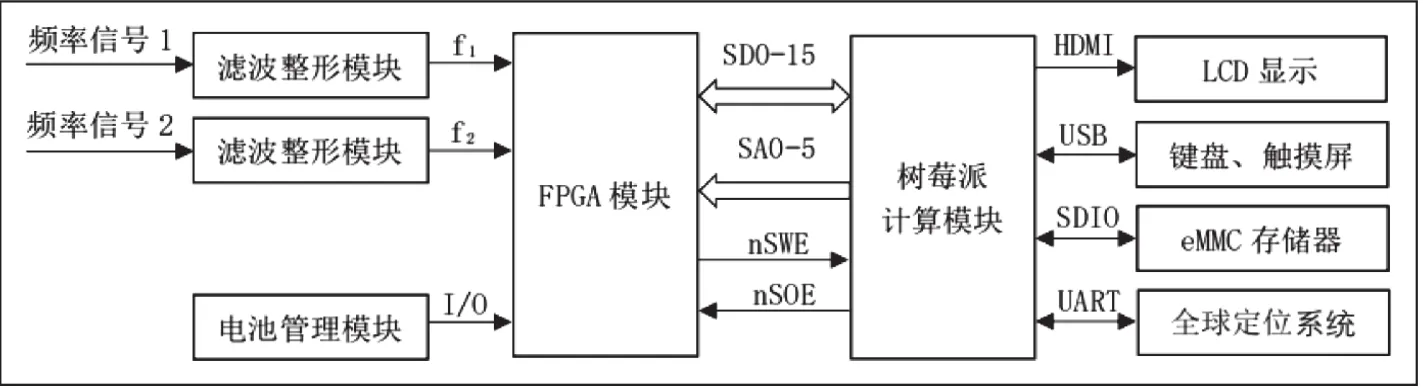
图1 便携式磁力仪系统框图
1.1 数据采集融合部分
以FPGA为核心的数据采集融合部分,其主要由:2通道滤波整形模块、FPGA模块和电池管理模块组成,以下详细描述。
1.1.1 滤波整形模块
铯光泵磁力仪输出TTL电平的方波信号,该信号电压范围0-5V,频率范围70-350KHz。滤波整形电路功能主要是完成对方波信号的缓冲滤波隔离,原理如图2所示,输入的频率信号经过运放缓冲隔离后,再输入二阶滤波电路,滤波后的信号进入比较器,比较器输出信号经过高速光耦隔离,形成所需要的矩形波,送入FPGA的I/O口。

图2 滤波整形电路
本数据采集系统支持2通道的铯光泵磁力仪的频率信号输入,因而设计了2个滤波整形模块。
1.1.2 FPGA模块
本设计采用的是Intel公司的Cyclone IV系列的EP4CE22F17芯片为核心器件实现改进型的等精度计数功能。Cyclone IV器件包含了许多新的特性,如嵌入存储器、嵌入乘法器、PLL和低成本的封装等。该芯片具有22000个逻辑单元,4个锁相环,最多153个I/O管脚,非常适合本设计使用。本设计采用100MHz的TCXO的高稳定度晶振,利用FPGA的锁相环模块将外部的晶振等效倍频到1600MHz,提高了等精度计数器的标准频率,减小了测频的相对误差。FPGA与树莓派计算模块的SMI通信控制接口包括: 数据总线SD0~SD15,数据地址 SA0~SA5,数据读取 nSWE,数据输出允许nSOE。
1.1.3 电池管理模块
本设计采用锂电池为整个系统供电,为了能够密切监视、控制和分配整个电池系统,选用LTC4013高电压电池充电器控制器为电池管理模块。该模块具有实时监测电池参数;电池状态估计;在线诊断与预警;充、放电与预充控制;均衡管理和热管理等功能。电池管理模块的使用最大限度地延长电池的整体使用寿命,降低使用成本,保护电池免受损坏,防止出现安全事故。
1.2 显控模块部分
以树莓派计算模块为核心显控部分,其主要由:树莓派计算模块、LCD显示、键盘、触摸屏、eMMC存储器和全球定位系统组成,以下详细描述。
1.2.1 树莓派计算模块
本设计选用树莓派计算模块的第4代板卡,该模块将各类组件集成在仅有55mm*40mm大小的主板上,其基于1.5GHz四核 ARM Cortex-A72 CPU架构,兼容运行微软的WINDOWS10 IoT Core操作系统,带有32GB eMMC存储器,8GB LPDDR4-3200 SDRAM内存,双通道HDMI显示接口,USB2.0和其他十余路通讯接口,最为方便的是模块还有一路SMI接口,这与FPGA的接口提供了一种高速的数据交换接口。利用树莓派计算模块丰富的外围接口,系统配置了5寸LCD显示屏和键盘、触摸屏。
1.2.2 全球定位系统
全球定位系统主要为系统提供实时位置和速度,保障按预定路线航行或选择最佳路线,同时也提供UTC时间。本设计选用Novatel公司的板卡,该板卡具有小型、低功耗、单频l1gps+GLONASS等特点,非常适合嵌入到用户产品中。GPS板卡通过串口输出 GPS 定位数据信息,默认采用 NMEA-0183协议,本设计只需要接收解析$GPGGA(全球定位数据)、$GPRMC(推荐最小数据)、$GPVTG(地面速度信息)等3类协议。
2 软件设计
2.1 数据采集融合软件
数据采集融合部分的软件主要实现了改进型的等精度测频。等精度测频方法的相对误差与被测频率的大小无关,仅与闸门时间和标准频率有关,即整个测试频段的等精度测量。本设计利用FPGA实现改进型的等精度测频方法,提高标准频率,在闸门时间一定的条件下,提高了测量精度,减小了测频的相对误差。
在FPGA芯片中主要由7个模块构成:PLL模块、D触发器、标准频率计数器、被测频率计数器、锁存器、电池管理接口和数据控制模块组成。本设计采用的是100MHz的TCXO的高稳定度晶振,利用FPGA的锁相环模块将外部的晶振等效倍频到1.6GHz,减小了测频的相对误差。
FPGA与树莓派计算模块的SMI通信控制接口包括: 数据总线 SD0~SD15,数据地址 SA0~SA5,数据读取 nSWE,数据输出允许nSOE。电池管理接口接收外部电池输入的信号,并且将处理完成的数据传输入数据接口模块。其组成框图如图3所示。
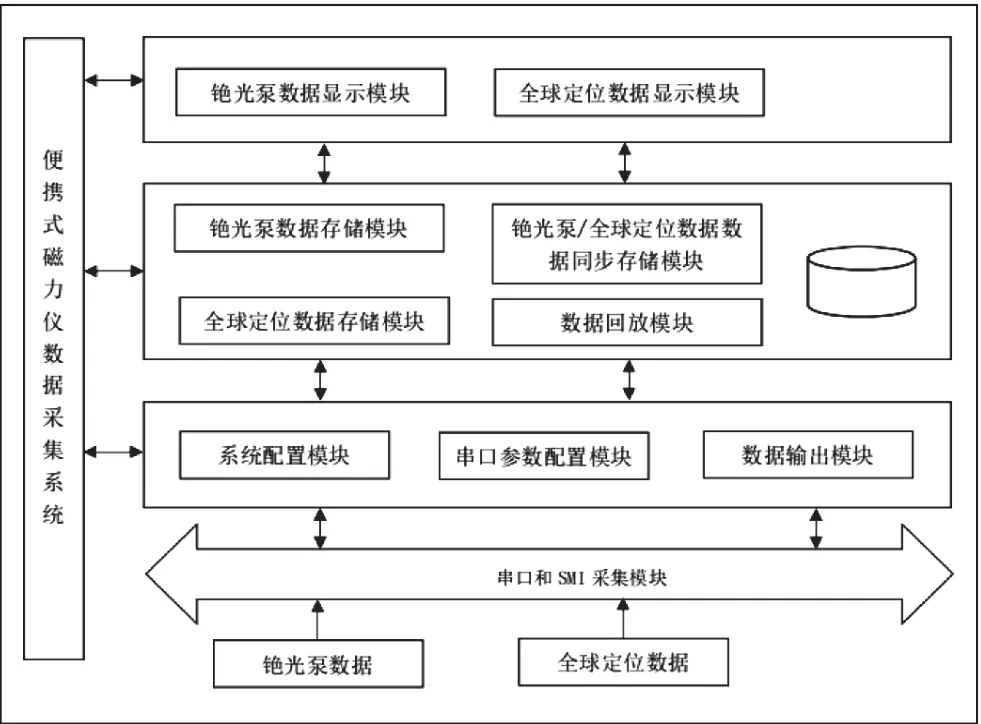
图3 数据采集系统软件组成框架
2.2 显控模块部分
树莓派计算模块支持安装微软的WINDOWS10 IoT Core操作系统,Windows10IoT核心版是针对小型设备进行了优化的一个Windows10版本,可以在ARM和x86/x64设备上运行。基于该操作系统,笔者用Visual Studio Community 2019环境开发了铯光泵磁力仪数据采集系统软件,其组成框架如图4所示。
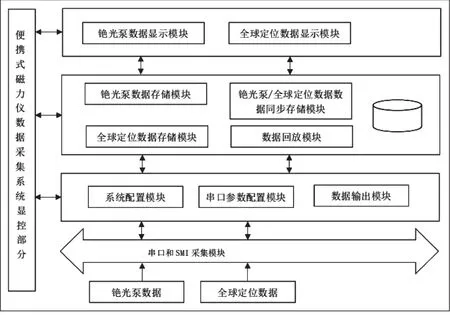
图4 显控模块部分数据采集系统软件组成框架
铯光泵磁力仪数据采集系统包含的相关软件模块:
(1)数据采集模块:铯光泵频率计数模块、全球定位数据模块;
(2)串口和SMI采集模块:多路串口,串口号、波特率等,SMI数据接口配置;
(3)曲线显示模块:铯光泵磁力仪曲线显示、全球定位数据曲线显示;
(4)数据存储模块:根据参数的设置,按照一定的格式将采集的数据存储到内存中,便于后处理;
(5)数据回放模块:在磁测作业结束后,将实际采集的信息在显示屏幕上进行回放显示;
(6)数据输出模块:以设定的频率将包含特定信息的数据包发送给上位机,默认通过串口发送;
(7)导航与定位模块;
(8)系统配置参数模块;
(9)数据管理:将实际作业测量的数据文件进行输出和管理。
3 结束语
项目组完成基于树莓派计算模块和FPGA的便携式磁力仪数据采集系统,该数据采集系统已被应用于铯光泵磁力仪数据采集系统中,达到了预期效果。
