关于混合多距离图像运动目标Retinex增强研究
2022-01-22程学军潘红改王建平
程学军,潘红改,王建平
(1.河南工业大学漯河工学院,河南 漯河 462000;2.河南科技学院信息工程学院,河南 新乡 453003)
1 引言
在机器视觉、图像检索,以及智能监控等应用领域中,对图像进行有效识别是研究的重点[1]。在某些应用场景中,由于目标与摄像机距离的差异,会形成混合多距离图像[2]。受制于摄像机性能,对于距离越远的目标事物,成像质量下降越严重[3]。如果通过硬件来提升图像质量,会大幅增加应用成本,且对于前期应用平台缺乏适用性。因此,要想确保图像识别的实际性能,针对混合多距离图像的增强技术尤为关键,它能够解决很多现实场景中的难题。尤其是存在运动目标的情况下,各种条件的改变将导致明显的亮度、清晰度,和分辨率等图像变化[4],此时对于目标的识别提出了更高了要求,为此,需要先进行图像增强,来提高图像有效信息的表现。在增强过程中,除了能够凸显一些特征和细节外,还经常会对噪声或者无关信息采取消除[5]。根据实际的应用需求,增强处理所采取的处理方式会有所不同。文献[6]针对人脸识别,设计了一种MSRCR增强算法,可以较好的提升清晰度不佳情况下的图像质量,但是仍然会有噪声干扰。文献[7]也是针对人脸识别,设计了一种线性内插法对图像进行增强,能够较好的增强远距离目标,但是对于运动目标引起的图像质量变化缺乏良好的适应性。文献[8]提出了Retinex-CNN增强算法,其中引入了分数阶处理,能够很好的处理对亮度与对比度,但是对于遮挡增强效果不佳。
考虑到Retinex对图像的分割特性,本文采用Retinex算法分解得到图像分量,根据各分量的具体情况采取相应增强策略,并针对图像细节和亮度分别设计了增强方法,利用细节、对比度、亮度等图像特征参数构建损失函数,确保增强结果的有效性。最后分别从主观和客观方面对增强方法的有效性进行仿真验证。
2 基于Retinex的图像增强
根据Retinex算法,任意图像都可以根据组成成分的频率情况进行分解。假定原始图像表示为I(x,y),则I(x,y)可以描述为如下成分乘积形式
I(x,y)=h(x,y)·l(x,y)
(1)
其中,h(x,y)是高频部分,又被称为反射分量,该项主要用于体现边缘区域;h(x,y)是低频部分,又被称为入射分量,该项主要用于体现除边缘外的其它图像区域。将乘积公式的各项取对数,并转换成频域形式,过程描述如下
lnI(x,y)=lnh(x,y)+lnl(x,y)
(2)
I(X,Y)=H(X,Y)+L(X,Y)
(3)
在频域公式中引入滤波传函F(X,Y),实现入射与反射分量的分解
I(X,Y)·F(X,Y)
=H(X,Y)·F(X,Y)+L(X,Y)·F(X,Y)
(4)
针对分解结果,可以通过增强其中某一项,削弱另一项的方式来达到目标优化效果。将分解公式采取傅氏反变换,并取指数计算可得如下结果
eFI(x,y)=eFh(x,y)+eFl(x,y)
(5)
其中,eFI(x,y)代表滤波之后得到的图像。该图像的实际效果由滤波传函F(X,Y)决定。依据以往的滤波经验,需要在F(X,Y)中引入高低频成分的相关参数。从而导致变量增加,控制过程复杂。于是这里设计了简化传函,公式表示为

(6)
其中,ε是锐化调整系数;α是高频阻带系数;D(X,Y)是像素点(X,Y)与中心像素(X0,Y0)的间距。从滤波传函可知,与中心像素的距离越近,对应的权重越大。对于入射分量,该方法能够获得较好的滤波效果。对于反射分量,靠近边缘的距离会出现灰度的突变,从而影响滤波效果。对此,在距离因素的基础上引入灰度系数。根据与中心像素灰度的接近程度确定权值,得到滤波后的入射分量
l(x,y)=

(7)
其中,w是像素范围;G(x′,y′)是像素点(x′,y′)的灰度;fs[(x,y),(x′,y′)]是尺度系数;fg[(x,y),(x′,y′)]是灰度系数,它们的计算公式表示如下
(8)
其中,ηs和ηg分别是关于距离和亮度的参数。
3 混合多距离运动目标增强优化
3.1 细节增强
考虑到增强操作过程中可能发生高频部分的过增强,这里引入可变增强因子来用控制分解出的高频部分。其思想是针对不同的细节区域,采取相应的增强力度,从而避免发生过增强或者噪声放大等情况。首先得到高频图像的区域对比度,求解方式为
C(i,j)=(Gmax-Gmin)/(Gmax+Gmin)
(9)
C(i,j)是i和j区域对比度;Gmax和Gmin分别是最大和最小像素灰度。在图像中,细节部分与平缓部分的C(i,j)值存在区别。C(i,j)会随着像素灰度的相似程度增加而减小,据此,可以对图像的细节区域进行分割。按照C(i,j)确定像素的细节权重,计算过程表示为
wk(i,j)=4sigm{ut[C(i,j)-vt]}×sigm{ut[vt-C(i,j)]}
(10)
其中,k=1,2,3,w1、w2、w3依次对应低、中、高三种细节权重;t=1,2,3,ut与vt代表经验参数;sigm函数表示如下
(11)
由细节权重确定增强因子,计算公式为:

(12)
其中,a1~a3代表权重系数;β[w(i,j)]是最后的增强因子,将其与尺度系数、灰度系数结合,得到可变增强因子控制的增强图像。
3.2 亮度增强
本文采用Retinex求解对比度,为进一步获得反射率,采用如下公式
R(x,y)=max(0,retinex(x,y)+1)
(13)
retinex(x,y)表示对比度,其结果包含正数与负数。如果单纯依靠反射率的倒数来估计光照情况,在非均匀情况下,得到的结果很容易产生强烈的波动。于是,必须对暗区域和亮区域采取调整。这里引入伽马变换[9],将亮度图像表示为

(14)
其中,φ是常量;r表示调整系数,r值越大,对暗区域的增强能力越好,但是也不能盲目增加r值。考虑到实际情况中的多尺度,亮度图像增强描述为

(15)
m是尺度个数;IL,i是尺度i对应增强结果;ωi是权重。在确定权重的时候,对于亮区域应该赋予相对较高的权重,这样能够更多的收集其中的细节。据此,将权重的计算方式设计为

(16)
经过多尺度处理后,能够降低不同尺度的固有缺陷,有利于改善单尺度处理效果。
3.3 增强效果评价
通过损失函数来评价图像增强算法的执行效果。考虑到混合多距离图像在细节与亮度方面的缺陷,直接采取精度评价会使增强后的图像产生失真。于是,这里利用细节、对比度、亮度等图像特征参数构建损失函数,确保增强结果的有效性。
依据对比度和亮度得到图像多尺度相似性公式为

(17)
b(x,y)表示亮度;c(x,y)表示对比度;n表示像素数量;γ与σ表示调节系数。S结果与图像细节完整程度之间具有正比例关系,据此将细节损失函数设计如下
LS(x,y)=1-S(x,y)
(18)
由上式可以推导出关于亮度的损失函数
Ll=Ls(I0,f(I1))
(19)
其中,I0表示正常亮度图像;I1表示低亮度图像;f(I1)表示增强图像。对于图像增强来说,最终目标就是尽可能得到正常照度图像f(I1)。这就需要从图像I1中除去照度分量,即可以采取像素点乘法,该学习过程可以描述为

(20)
其中,n是学习的样本个数。该公式通过比较增强图像和正常图像来控制增强学习的损失精度。为了使增强学习过程获得更高的精度,这里通过反演得到如下公式

(21)
该公式通过比较低亮度图像和正常图像来控制增强学习的损失精度。结合式(20)和(21),可以得到双层限定损失函数,从不同角度对增强精度进行控制。
4 仿真与结果分析
仿真过程中,采用MATLAB R2014b实现增强算法。在确定细节权重时,设置经验参数u1=u2=15,u3=10,v1=v2=0.55,v3=1;在确定增强因子时,设置权重系数a1=a2=0.25,a3=0.5;为了平衡亮度增强效果,伽马变换的调整系数设置为γ=2.25。测试图像采用具有场景和视野差异的混合多距离图像,且包含运动目标。
4.1 主观实验结果
图1中(a)为实验图像集中的任意三幅图像,可以看出,它们均包含不同距离的运动目标,对于大多数图像识别算法而言,距离较远的目标将无法被有效识别。经过本文算法增强处理后,将图中的主要特征目标进行了增强,并如图1中(b)所示采用反色进行了标注。从(b)图像可以看出,原始图像中的显著目标都能够得到很好的处理,运动目标也不存在遗漏,基于此图像,只需要加以简单的特征提取就能够完成其中运动目标的识别。
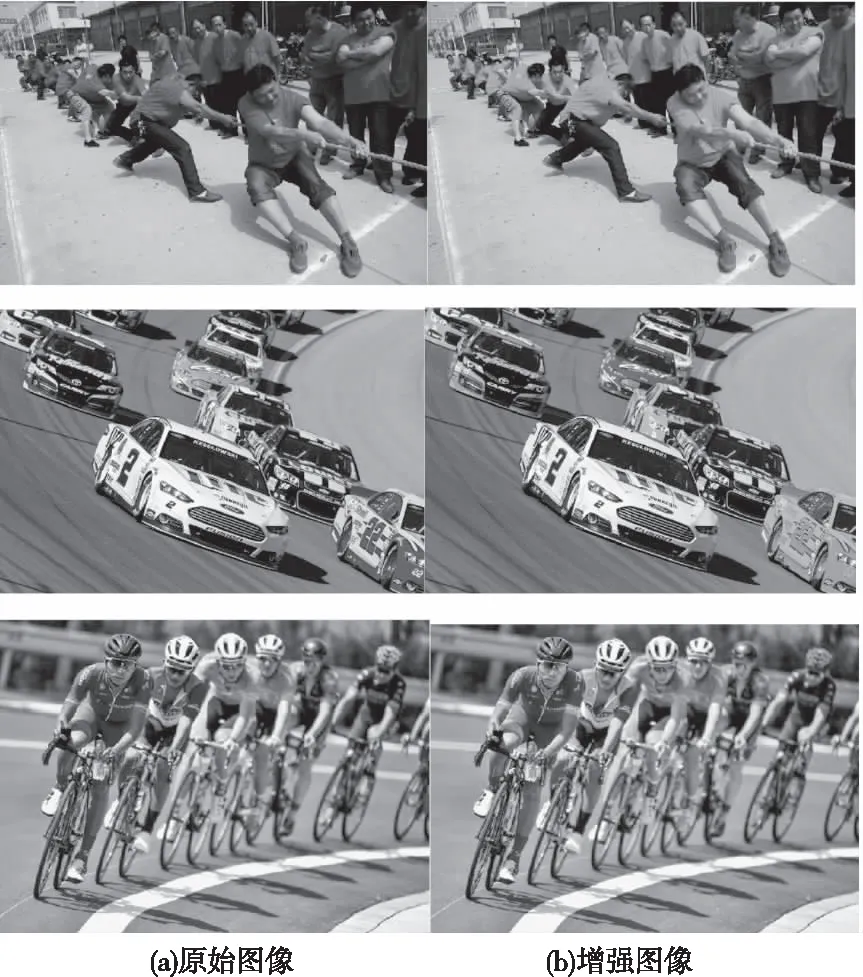
图1 原始图像与增强结果
4.2 客观评价与实验结果
对于增强后的图像质量,实验过程中选择峰值信噪比(PSNR)进行衡量。PSNR是通过比较增强前后图像像素差异得到,公式表示如下
(22)
Pmax代表最大像素;MSE代表均方误差,其公式表示为

(23)
L与W分别代表图像的长度和宽度;X(i,j)与Y(i,j)分别代表增强前后eFI(x,y)位置处的图像像素。PSNR结果越大,代表增强后的图像质量越高。
此外,还选择结构相似度(SSIM)来衡量图像的增强效果。SSIM能够描述增强前后图像在结构方面的近似性,其公式表示如下
SSIM=C(X,Y)·L(X,Y)·S(X,Y)
(24)
C(X,Y)是对比度比较;L(X,Y)是亮度比较;S(X,Y)是结构比较。SSIM的取值范围是[0,1],SSIM的结果越大,代表增强前后图像的保真度越好。
首先测试得到PSNR指标,并引入文献[7]和文献[8]进行对比。图2描述了各增强方法对于图1(a)三幅实验图像的PSNR值。通过比较发现,本文方法的PSNR指标最高达到27.14,PSNR指标是最高的,说明增强后的图像质量最好,能够更大程度体现图像的视觉效果,进而表明方法对于混合多距离图像的运动目标具有更好的增强性能。

图2 PSNR结果对比
然后测试得到SSIM指标,图3描述了各增强方法在三幅测试图像上的SSIM指标对比情况。可以看出,对于三幅测试图像,本文方法均能获得较高的指标,最高达到0.72。意味着增强后的图像存在较少的结构失真,且在对比度和亮度方面的调整也比较均衡。
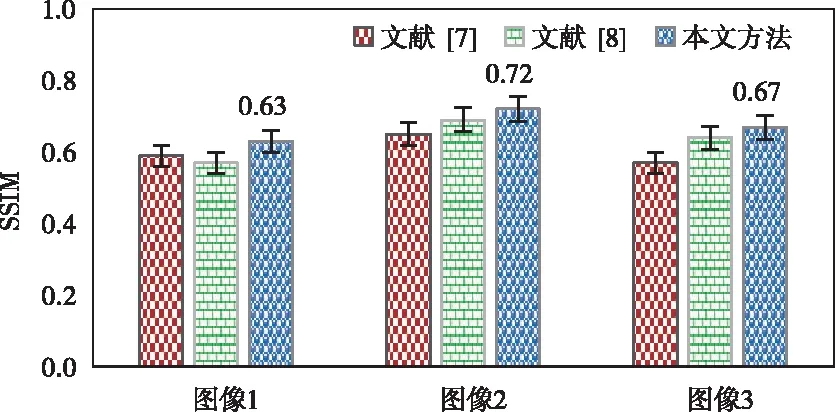
图3 SSIM结果对比
最后,利用各算法对不同距离的运动目标采取增强处理,将得到的图像通过线性判别进行识别,得到距离对增强效果的影响,结果如图4所示。对于近距离的运动目标,各算法都能取得较好增强效果。在目标距离增加时,可见本文算法对应的识别率下降速度较为缓慢,当目标距离达到40m时,识别率为0.72,较其它两种方法分别高出0.05和0.03。由于识别算法一致,影响识别率的主要因素就是增强图像的质量问题,因此,该实验结果能够证明本文方法在混合多距离图像运动目标增强方面的优势。
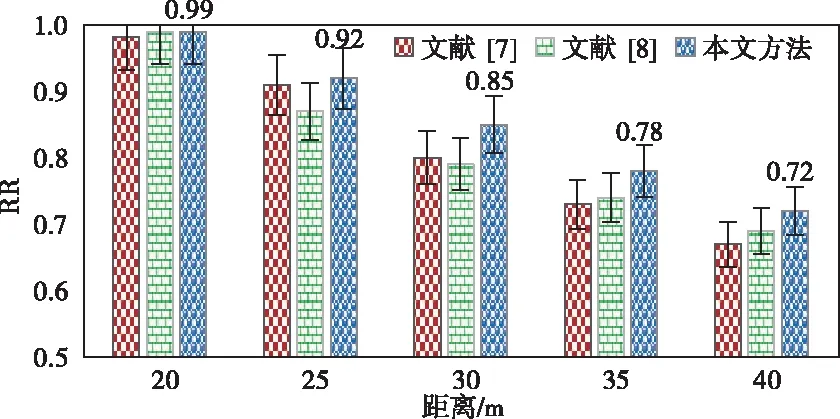
图4 距离对增强效果的影响
5 结束语
针对混合多距离图像的运动目标识别,本文首先采用Retinex算法确定图像的高频与低频成分,根据各成分所描述的图像特征差异,采取不同的增强处理。利用灰度系数来防止高频成分增强时边缘处的灰度突变,并分别从细节和亮度方面进行了增强优化,同时设计了损失函数来衡量增强效果。最后从主观与客观两方面对所提增强方法进行验证。主观结果显示原始图像中的运动目标都能够被准确标注,表明增强算法能够准确找出图像中的目标对象。客观结果显示所提方法具有良好的PSNR和SSIM指标,且基于此方法的图像识别率更高,表明该方法能够有效处理混合多距离图像,提高其中运动目标的增强效果。
