阵列信号维纳滤波用于主动声呐图像增强处理
2022-01-21陈敬军
陈敬军,范 威
(1.海军驻上海地区第七军事代表室,上海 201108;2.水声对抗技术重点实验室,上海 201108)
0 引 言
高频主动声呐是探测和识别蛙人等水下小目标的主要手段[1-2]。在近岸浅海环境下,声呐接收到的信号中既包含水中目标、水下设施、鱼群及水底地形的回波信号,也包括水体介质起伏变化、声呐平台晃动、航船噪声等产生的随机干扰噪声信号。根据声呐检测准则,提高目标回波的信噪比(Signal to Noise Ratio,SNR)或声呐图像对比度可以在给定检测概率下减小虚警,所以,要提高水下小目标的探测和识别性能,就需要采取有效措施解决高频主动声呐图像处理中面临的背景噪声强、目标轮廓模糊、回波对比度低等问题[3]。
在图像处理、语音处理、矢量水听器处理领域,维纳滤波是图像和信号降噪处理的重要手段[4-7]。本文利用目标回波信号和干扰噪声在空间和时间相关统计特性上的差异,使用维纳滤波来提高水下小目标的探测和识别性能。针对高频主动声呐图像增强问题,本文提出的基于最小均方差准则的声呐阵列信号维纳滤波器不是直接对基元接收到的信号进行维纳滤波,而是将其通过两个步骤实现:首先对阵列信号进行主动最小方差无畸变响应(Minimum Variance Distortionless Response,MVDR)波束形成处理,进而对各个方位的波束信号进行单通道维纳滤波处理。本文给出了推导过程,并用实际湖上试验数据进行了验证,对阵列信号进行维纳滤波能够达到降低噪声影响、增强声呐图像对比度的目的,有利于提高声呐的目标检测识别性能。
1 维纳滤波原理
1.1 单通道信号维纳滤波
包含噪声的主动声呐接收信号模型为

其中:s(k)为水下目标回波信号;n(k)为干扰噪声信号。设s(k)与n(k)不相关,维纳滤波是根据最小均方差准则进行设计的线性贝叶斯滤波器,其输出为


其中:rx是自相关函数、rsx信号和噪声的互相关函数,对式(3)两边进行傅里叶变换,可以得到:



把式(5)代入最优权估计式(4),可以得到:

从式(6)可以看出,维纳滤波仅用到了信号和噪声的功率谱,根据卷积定理,含噪信号维纳滤波后的时域信号可以通过傅里叶逆变换计算:

图1和图2分别是高信噪比条件和低信噪比条件下单通道含噪信号的维纳滤波处理仿真结果。可以看出,随着信噪比的增加,利用维纳滤波从含噪信号中估计信号与原始信号越接近。
1.2 主动声呐阵列信号维纳滤波

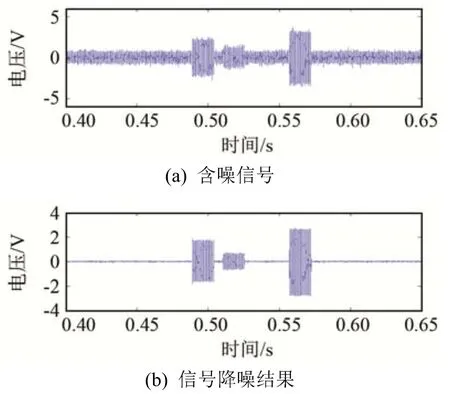
图1 高信噪比条件下维纳滤波仿真Fig.1 Simulation of Wiener filter at high SNR
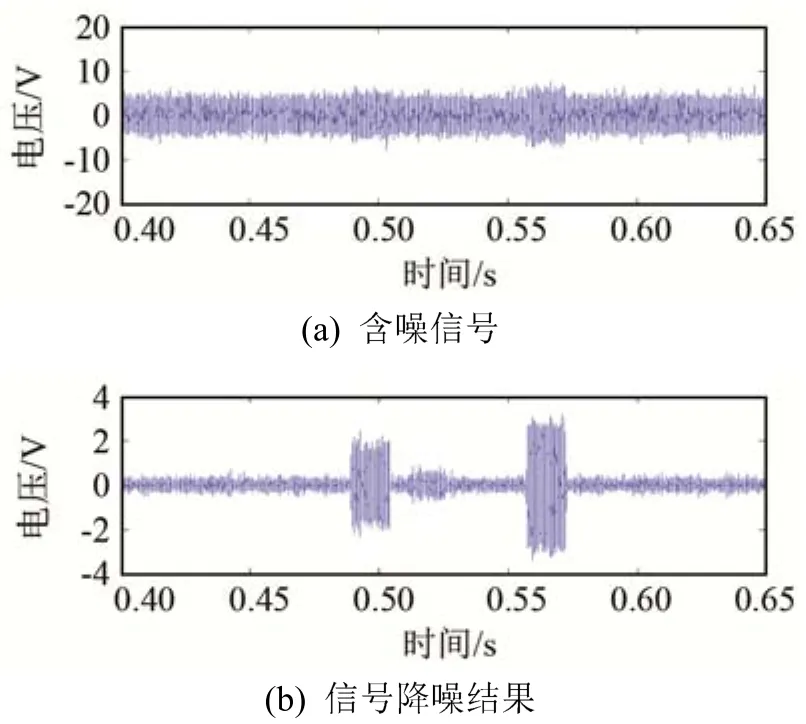
图2 低信噪条件下维纳滤波仿真Fig.2 Simulation of Wiener filter at low SNR



通过使最小均方差最小,求解权系数wm:




1.3 阵列信号维纳滤波的两级串联处理实现
对阵列信号的维纳滤波可以利用式(14)计算出的权值对阵元信号进行滤波处理。考虑到主动声呐目标检测和识别都是基于多波束数据,现在探讨将维纳滤波和常用波束形成方法等处理进行结合的方法。
最小方差无畸变(MVDR)波束形成器常用于抑制空域干扰,它通过阵列信号协方差矩阵估计,构造随时间快拍变化的自适应权矢量,使目标方位信号无失真输出、波束输出功率最小,实现高分辨测向。MVDR波束形成器的权向量为[10]


比较式(6)和式(16)可以得出,阵列信号维纳滤波器可以等效为MVDR波束形成器级联一个后置的标量维纳滤波器,即对于阵列信号,首先进行MVDR波束形成处理,然后,对各个波束分别进行时域信号维纳滤波。其中,后置维纳滤波按照1.1节的方法进行处理,采用MVDR波束输出估计信号功率。同时考虑到声呐图像是稀疏的,采用MVDR波束输出在时域上的平均估计噪声功率。



2 主动声呐数据处理与分析
2.1 主动声呐阵列数据MVDR波束形成处理
本节采用主动声呐阵列接收的多通道复包络实测数据进行处理。其中,接收阵是阵元数为128的直线阵,湖上试验环境有大量的水下干扰和较强的水底混响。
根据1.3节的推导分析,主动声呐阵列信号的维纳滤波处理可以分解为主动MVDR波束形成和后置维纳滤波。下面首先通过数据处理分析主动MVDR波束形成在声呐图像增强方面的作用。本文通过湖上试验获取了不同信噪比条件时的刚性球体目标多通道阵列回波信号,图3是高信噪比条件下刚性球体目标的常规波束形成(Common Beam-Forming,CBF)声呐图像。
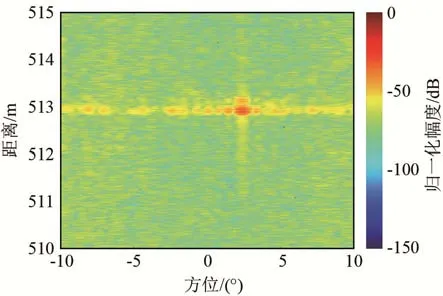
图3 高信噪比条件球体目标CBF声呐图像Fig.3 Typical CBF sonar image of sphere at high SNR
图4为高信噪比条件下刚性球体目标的MVDR波束形成声呐图像,从图中可以看出主动MVDR处理提高了目标回波的方位向分辨率,球体目标图像的局部对比度也得到提高。
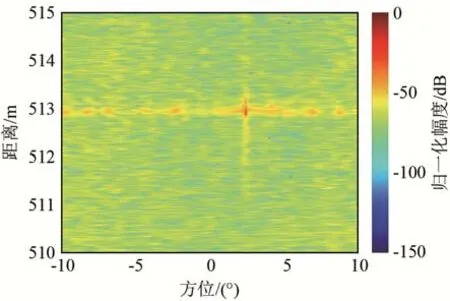
图4 高信噪比条件球体目标MVDR声呐图像Fig.4 TypicalMVDR sonar image of sphere at high SNR
为了进一步比较高信噪比条件下CBF与MVDR波束形成处理的性能,图5为目标所在距离下的波束输出比较,其中,红色虚线是MVDR波束形成处理的结果,蓝色实线是CBF波束形成的结果,可以看出MVDR处理降低了目标信号的方位上的旁瓣,比CBF处理降低约5 dB。
当球体目标处于水底混响区时,目标回波的信噪比有所下降。图6和图7分别是低信噪比时球体目标的CBF与MVDR波束形成声呐图像,从图中可以看出,在低信噪比情况下两种方法得到目标的旁瓣均不明显。图8是低信噪比条件下目标所在距离CBF和MVDR的波束输出比较,可以看出,球体目标信号附近的旁瓣比CBF处理降低约2~3 dB,CBF主瓣宽度为0.6°、MVDR波束形成处理的主瓣宽度为0.3°。
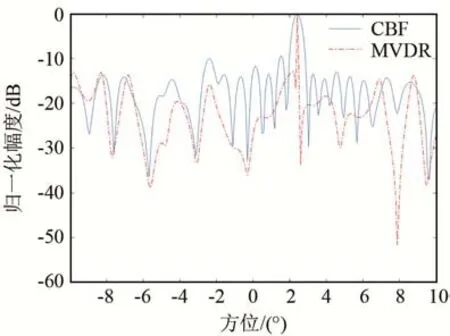
图5 高信噪比条件目标CBF和MVDR图像旁瓣比较Fig.5 Sidelobe comparison of CBF andMVDR results at high SNR
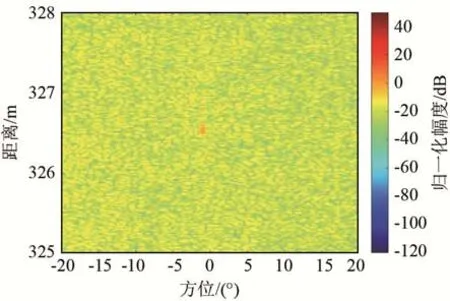
图6 低信噪比条件球体目标CBF声呐图像Fig.6 Typical CBF sonar image of sphere at low SNR
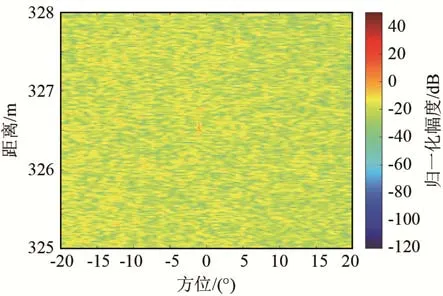
图7 低信噪比条件球体目标MVDR声呐图像Fig.7 TypicalMVDR sonar image of sphere at low SNR
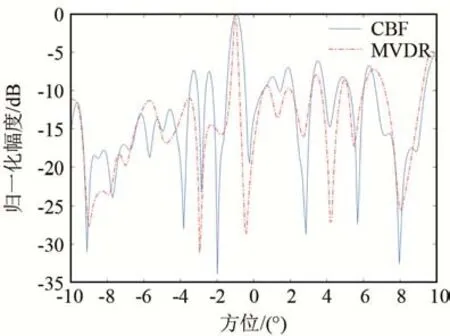
图8 低信噪比条件目标CBF和MVDR图像旁瓣比较Fig.8 Sidelobe comparison of CBF andMVDR results at low SNR
2.2 主动声呐图像后置维纳滤波处理
2.2.1 水下目标主动声呐图像增强
从上述阵列数据的主动MVDR波束形成处理结果可以看出,虽然目标局部信噪比得到了提高,但是,声呐图像仍然具有斑点噪声强、目标轮廓模糊、图像对比度低等特点。根据阵列维纳滤波处理过程,下面分析后置维纳滤波在水下目标回波检测方面的性能,以图9所示的泡沫球立方框目标进行分析。

图9 泡沫球立体框目标Fig.9 Picture of square box target of foam spheres
图 10是远距离条件下泡沫球立方框目标的典型声呐图像,从图中可以看出目标的基本形状,但由于声呐图像的背景噪声较高,目标图像的对比度较低。
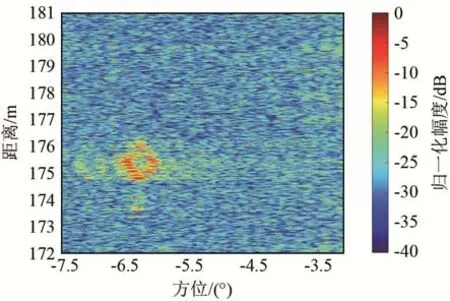
图10 水下正方框体目标的原始声呐图像Fig.10 Raw sonar image of the square box target
采用后置维纳滤波对图10中各个方位的距离向信号进行分段处理,在各距离段内,确定性信号功率由主动MVDR波束形成输出估计、随机噪声功率由该距离窗口内信号的平均功率进行估计。后置维纳滤波处理结果如图11所示,其中,维纳滤波前后的信号幅度都按照最大值进行了归一化,并且维纳滤波前后的声呐图像动态范围一样。从图11中可以看出,维纳滤波处理提高了目标图像的对比度、减小了图像的背景噪声。

图11 水下正方框体目标的声呐图像维纳滤波处理结果Fig.11 Wiener filtering result of sonar image of the square box target
2.2.2 声呐图像噪声的影响分析
为了分析声呐图像噪声强弱对后置维纳滤波处理结果的影响,本文选取图像噪声背景弱和图像噪声背景强条件下的声呐图像数据进行比较分析。
图12和图13分别是低噪声背景条件下后置维纳滤波处理前后的声呐图像,按照幅度最大值进行了归一化,且动态范围相同,从图中可以看出,后置维纳滤波大幅度地减小了斑点噪声的影响,增强了声呐图像的对比度。
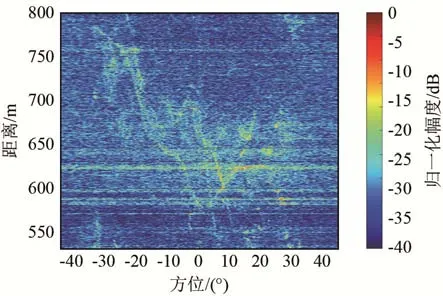
图12 低噪声背景水下环境声呐图像Fig.12 Sonar image of underwater environment with low noise background
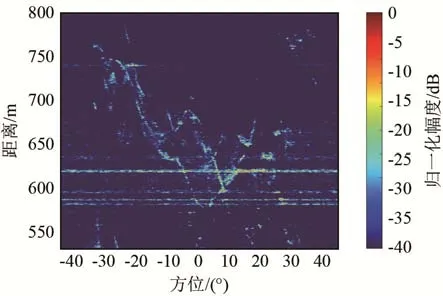
图13 低噪声背景水下环境声呐图像维纳滤波处理Fig.13 Wiener filtering output of sonar image of underwater environment with low noise background
图14和图15分别是高噪声背景条件下,后置维纳滤波前后的声呐图像。通过比较可以看出,声呐图像中大片的随机性斑点噪声得到抑制,散射较强的回波特征得到保留。

图14 高噪声背景水下环境声呐图像Fig.14 Sonar image of underwater environment with high noise background
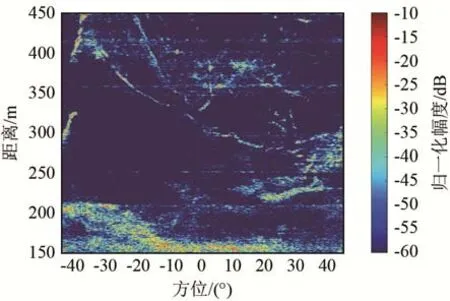
图15 高噪声背景水下环境声呐图像维纳滤波处理Fig.15 Wiener filtering result of sonar image of underwater environment with high noise background
3 结 论
根据本文的推导,基于最小均方差准则的声呐阵列信号维纳滤波器可以通过两个步骤实现,即首先对阵列信号进行主动MVDR波束形成处理,然后对各个方位的波束信号进行单通道维纳滤波处理。这两个步骤的作用是不同的,其中,主动MVDR处理提高了目标回波信号的局部信噪比,而单通道维纳滤波器则降低了随机噪声,上述两个步骤级联在一起共同实现了增强声呐图像对比度的目的。
声呐阵列信号维纳滤波的关键问题是从数据中准确估计确定性信号的功率和随机噪声的功率等先验参数信息,这些参数的估计精度影响着维纳滤波器的效果。对于本文的试验数据,水下目标和水下场景的回波信号在声呐图像中是稀疏的,声呐图像以随机噪声信号为主,所以,以一定距离窗口内的平均功率估计噪声功率的方法具有合理性,从声呐图像增强数据处理结果可以得到验证。然而,如果声呐图像中确定性信号占主要成份,则需要采用更为准确的噪声功率估计方法。