基于自适应数据拟合的3D视觉传感器设计
2022-01-21武辉林武文娟
武辉林,武文娟,李 晧,姜 静
(1.河北省科学院应用数学研究所,河北 石家庄 050081;2.河北省信息安全认证技术创新中心,河北 石家庄 050081;3.中国人民大学信息学院,北京 100872;4.河北燃气有限公司,河北 石家庄 050051)
0 引言
针对国内机器人的特性和应用特点,本文研究设计了基于结构光的3D传感器系统,利用线激光扫描物体从而获得整个被测物体表面的三维点云数据[1-2],3D视觉传感器的应用对于工业机器人多场景的大规模应用提供了技术保障,同时大大丰富了机器人的信息感知手段。它可以与机器人紧密结合,广泛应用于焊缝跟踪、轮廓检测、散乱物品识别、无序抓取等场合。
1 3D传感器视觉系统整体流程
3D传感器依靠激光器与相机进行测量,激光器为线激光器,激光投射在目标物上,在目标物表面形成漫反射,被相机拍摄到通过偏振片和滤波片的激光线条,通过图像处理得到光条中心(光条中心的精确获取是传感器高精度的重要保证),通过运动控制卡控制3D传感器的运动拍摄,生成点云数据,通过点云数据处理得到感兴趣信息,交由执行机构去执行相应的动作[3]。整体流程如图1所示。
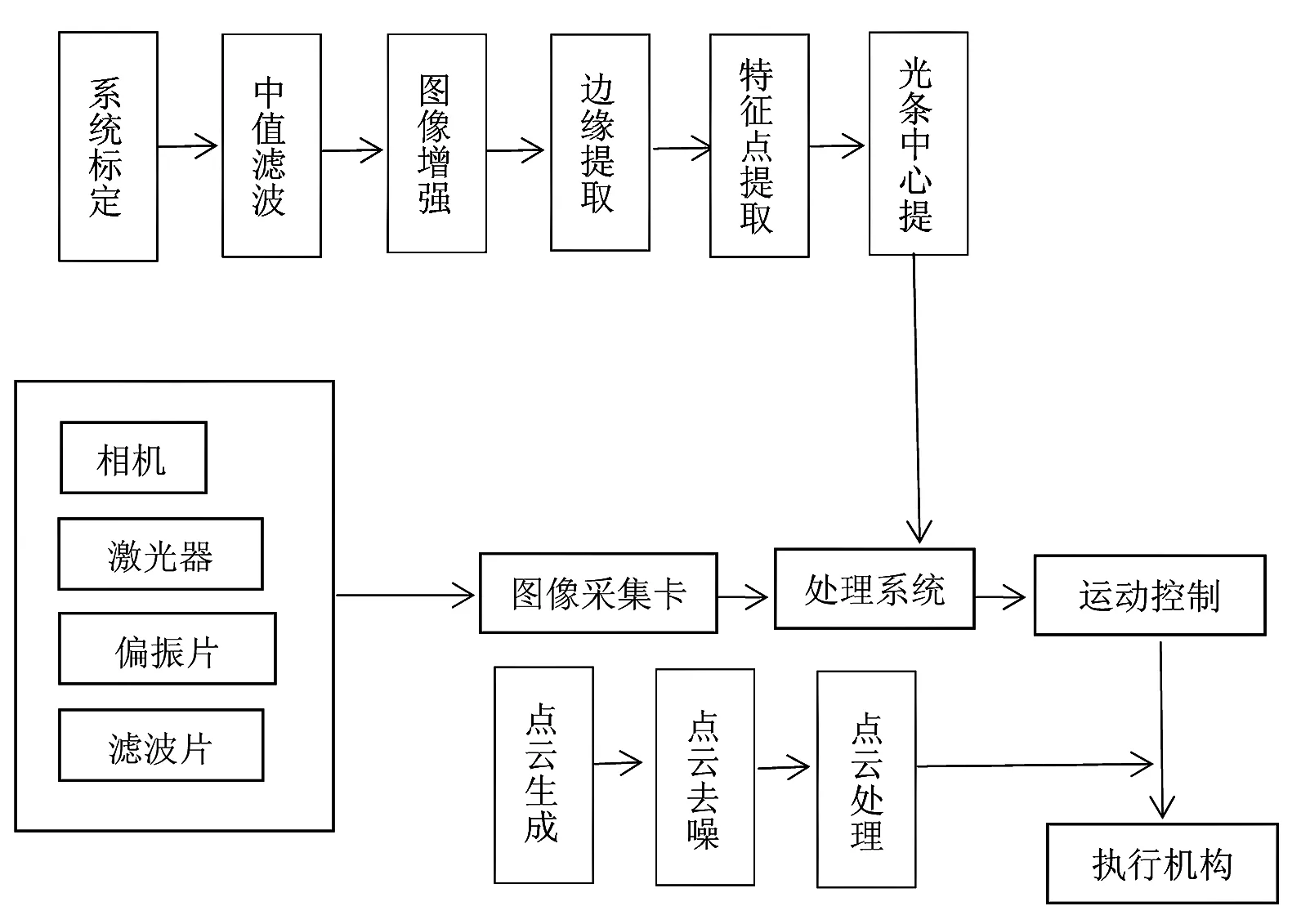
图1 传感器视觉系统整体流程图
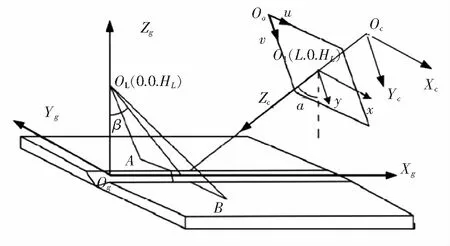
图2 激光三角测量示意图
2 激光三角测量计算方法
3D传感器依通过相机捕获的激光器光线配合生成三维图像,激光器为一字线型,激光打在被测物上,在被测物表面经过反射被相机扫描到,通过相机采集到的光线数据与CCD和激光器的位置关系,计算出被测物体的三维坐标。Og为光点入射点,Xg是定义的横向方向、Yg为定义的纵轴方向、Zg为法线方向,相机入射光线与水平面法线角度为α,CCD坐标系与法线角度为β角。
用公式表示为:
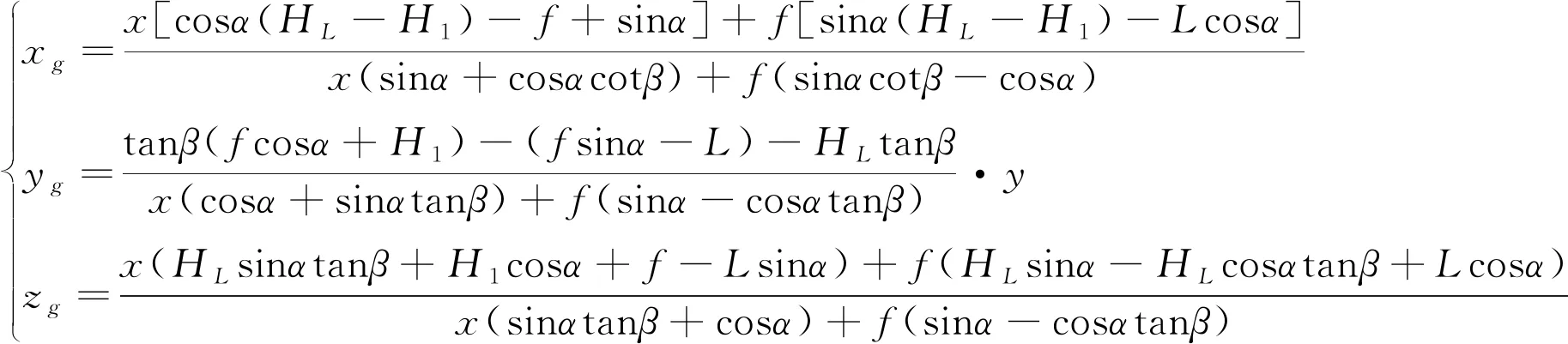
(1)
3 世界坐标和相机坐标的关系
三维世界的坐标都由世界坐标系来表示。摄像机可以放置在三维世界中的的所有位置,可以用世界坐标系来描述摄像机的位置,并用它来描述三维世界中的相机拍摄到的物体的位置。相机坐标系是以CCD为中心的坐标系统,CCD的光轴为z轴,CCD中心为坐标原点。它们之间的关系用下列公式表示。
(1)世界和相机坐标关系的矩阵如式(2)所示
(2)
(2)图像和世界坐标系的公式如式(3)所示
(3)
加入倾斜因子校正空间关系后,世界坐标W(xw,yw,zw)和图像坐标W(u,v)的关系为:
(4)
4 自适应窗曲线拟合法
3D传感器在接收光线部分采用了滤波片和偏振片相结合的方式去掉部分杂光,但是在复杂的工业应用环境下,杂光不可避免,为此,采用自适应窗曲线拟合的方法提取光条中心[4],提取过程如图3和图4所示。
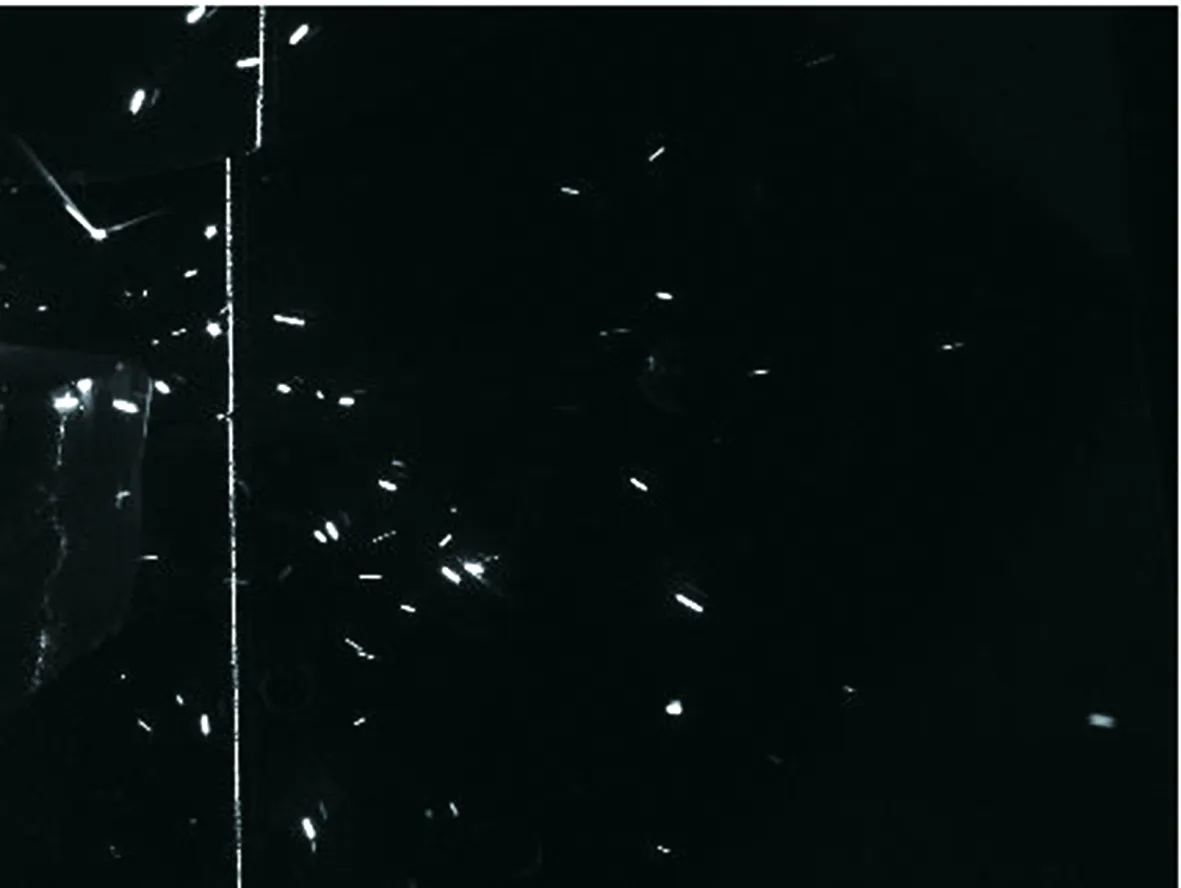
①原始光条图像

②低通中值滤波
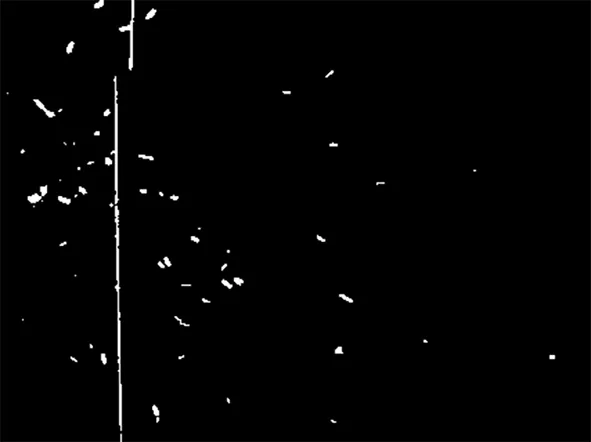
③阈值分割

④滤波并初定位
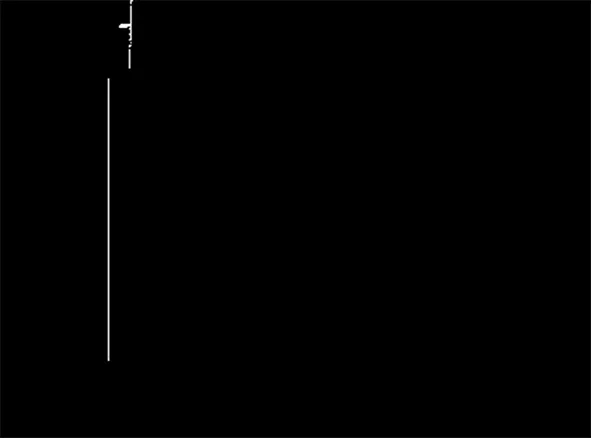
⑤自适应窗曲线拟合
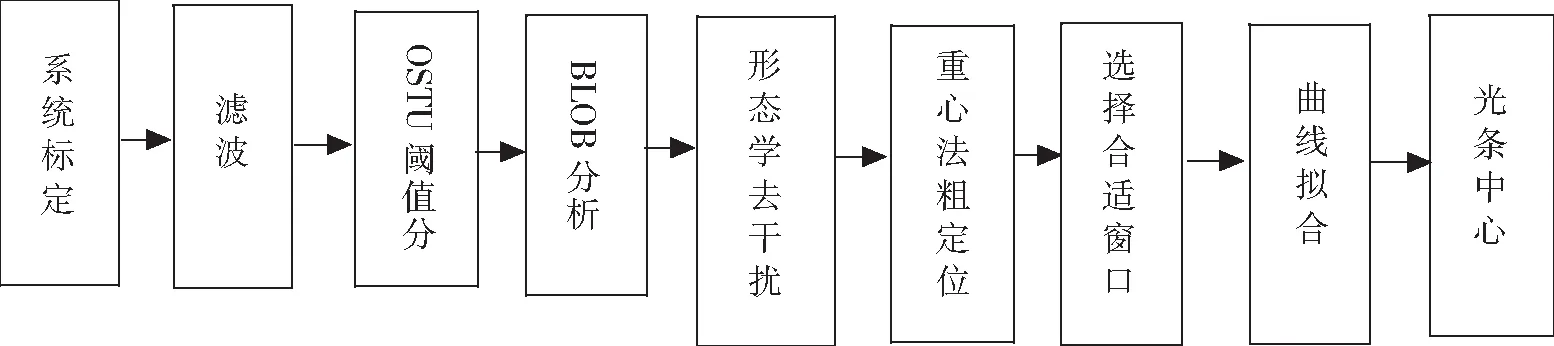
图4 图像处理过程
5 3D视觉检测系统设计与应用
5.1 硬件组成
传感器采用相机和激光线成45°的布局方式,相机为dalsa5000线阵相机,采用630nm激光器,选择630±10nm的滤光片和偏振片。
5.2 软件设计
软件采用3D相机采集产品的深度图,通过图像坐标系、相机坐标系、世界坐标系的建立、光条中心提取、模板设定和提取、坐标系建立、各个检测位搜寻、比对等完成对产品检测,并根据产品形态、光线变化、ROI特点进行相应算法的调整,实现ROI高度的精确测量,为了更好地指导流水线上的生产工作,该软件设计中把检测结果在显示屏中实时显示,可以方便质检人员随时方便查看检测结果。
通过本项目设计的3D视觉传感器可以完成物体的扫描和点云的重建,并根据需求通过点云算法完成定位、识别、测量等工作。图5和图6是对Led灯电路板进行扫描和重建的结果。实验结果表明,物距在1m范围内,测量误差小于1mm,达到了设计要求。

图5 扫描重建效果图
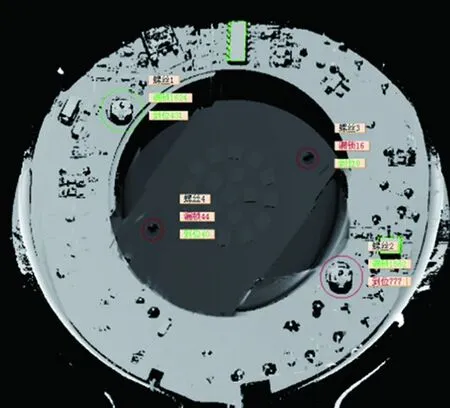
图6 检测后效果图
6 结束语
本设计基于结构光的机器人视觉传感器在速度及精度上都可以得到保证,同时还可适应多种不同的测量环境,结构简单,操作方便,与机器人结合最为紧密,可广泛应用于焊缝跟踪、轮廓检测、散乱物品识别、无序抓取等场合。